Собственный шум цифрового фильтра
Собственный шум цифровой системы – это шум, обусловленный квантованием результатов умножения, выполняемых в системе.
В состав цифрового фильтра входят умножители, каждый из которых является источником шума. Произведение двух b-разрядных чисел имеет удвоенную разрядность. Для использования результата произведения в последующих вычислениях, его ограничивают b разрядами. Это приводит к ошибке округления, дисперсия которой определяется выражением:
 . (3.1)
. (3.1)
Анализ собственных шумов является более сложным, так он должен учитывать:
- точки системы, где осуществляется квантование;
- параметры генерируемых шумовых сигналов;
- путь прохождения каждого шумового сигнала;
- структуру и параметры цифрового фильтра.
Оценка параметров собственного шума осуществляется в три этапа:
1) Составляется линейная модель цифрового фильтра, учитывающая шумы квантования в точках перемножения;
2) Определяется реакция цифрового фильтра на каждый шумовой сигнал;
3) Вычисляется собственный шум на выходе системы и его характеристики.
При составлении линейной модели цифрового фильтра каждый умножитель заменяется линейной моделью умножителя в виде последовательного соединения идеального умножителя с неограниченным количеством разрядов и сумматора, на вход которого наряду с точным значением произведения поступает ошибка квантования  :
:  .
.
Линейная модель цифрового рекурсивного фильтра первого порядка с указанием шумов квантования приведена на рисунке 3.1.
Реакция цифрового фильтра на каждый шумовой сигнал может быть получена в соответствии с выражением:
 , (3.2)
, (3.2)
где  - импульсная характеристика части цифрового фильтра от точки приложения
- импульсная характеристика части цифрового фильтра от точки приложения  -ого источника шума до выхода системы.
-ого источника шума до выхода системы.
Соответственно, дисперсия соответствующей составляющей выходного шума определяется выражением:
 . (3.3)
. (3.3)
Суммарная дисперсия выходной шума цифрового фильтра может быть записана следующим образом:
 . (3.4)
. (3.4)
Рисунок 3.1 – линейная модель рекурсивного фильтра 1-го порядка для анализа эффектов квантования
Например, передаточная функция цифрового резонатора (полосового фильтра), полученная по аналоговому прототипу резонансного контура, имеет следующий вид:
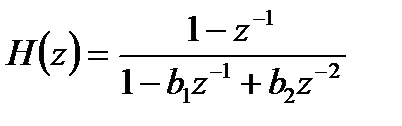 . (3.5)
. (3.5)
Для этого случая шумы квантования и собственный шум фильтра описываются выражениями, приведенными в Таблице 3.1.
Таблица 3.1. Дисперсия шума на выходе полосового фильтра для различных структурных реализаций ЛДС
| Прямая форма, каноническая форма 2 | Обращенная форма, каноническая форма 1 | |
| Шум квантования | 
| 
|
| Собственный шум | 
| 
|
Из Таблицы 3.1 следует, что дисперсии шумов квантования равны для всех рассмотренных структурных реализаций. Дисперсия внутреннего шума для прямой формы и канонической формы 2 меньше дисперсии внутреннего шума обращенной формы и канонической формы 1.
Следует отметить, что каскадная и параллельная структуры обладают наилучшими шумовыми свойствами по сравнению с прямой или канонической формами реализации цифровых фильтров высокого порядка.
Литература
Петровский А.А. Методы и микропроцессорные средства обработки широкополосных и быстропротекающих процессов в реальном времени / Под ред. Г.В. Римского. – Мн.: Наука и техника, 1988. – 272 с.
Глинченко А.С. Цифровая обработка сигналов: в 2 ч. Ч.1. Красноярск: Изд-во КГТУ. 2001. 199 с. (п. 4.5)
Основы цифровой обработки сигналов: учебное пособие / Ю.А. Брюханов, А.А. Приоров, В.И. Джиган, В.В. Хрящев; Яросл. гос. ун-т им. П.Г. Демидова. - Ярославль: ЯрГУ, 2013. – 344 с. (с. 155)
Карташов В.Г. Основы теории дискретных сигналов и цифровых фильтров. – М.: Высш. школа, 1982. – 109. (с. 89: показывает, что для рекурсивного фильтра 1-ого порядка при переходе от прямой реализации структурной схемы к канонической дисперсия собственных шумов может снизиться в 10 раз).
Гадзиковский В.И. Цифровая обработка сигналов. М.: СОЛОН-ПРЕСС, 2013. – 766 с. (с. 330: утверждается, что при прямой реализации коэффициенты числителя не влияют на собственные шумы в отличие от канонической реализации, причем для фильтра 3-его порядка дисперсия шумов может отличаться в 100 раз).
Дата добавления: 2017-09-19; просмотров: 2392;