Системи телемеханіки.
Організація диспетчерських служб.Автоматизація виробничих процесів на промислових підприємствах тісно пов'язана з телемеханізацією й диспетчеризацією. Диспетчеризація являє собою систему централізованого керування. Телемеханізація є одним з основних технічних засобів диспетчеризації. Керування і контроль над станом здійснюють із диспетчерських пунктів (ДП). На контрольованому пункті (КП) розташовують керовані і контрольовані об'єкти. У якості каналів зв'язку при телемеханізації звичайно використовують приводні лінії (стандартні телефонні канали), що пропускають спектр частот від 300 до 3400 Гц. Мережа зв'язку промислового підприємства виконують комплексної, тобто єдиної для телефонного зв'язку, пожежного сигналізації та телемеханізації. У кабелях передбачають вільні жили для можливого розширення телемеханічної системи.
Для успішного керування використовують засоби телемеханізації, до яких відносяться пристрої телекерування (ТК), телесигналізація (ТС), телевимірювання (ТВ), а також джерела живлення, диспетчерські пульти та пункти.
Призначення, види та функції телемеханічних систем.Однієї із систем автоматизації є телемеханічна система. Телемеханічні системи (ТМС) знаходять широке застосування в різних сферах людської діяльності, однак принципи побудови ТМС є однаковими, змінюються лише обсяг і складність апаратури. Телемеханічна система містить у собі технічні засоби, за допомогою яких забезпечуються перетворення та передача на відстань інформації з метою керування виробничими процесами. На мал. 17.7 наведена класифікація ТМС.
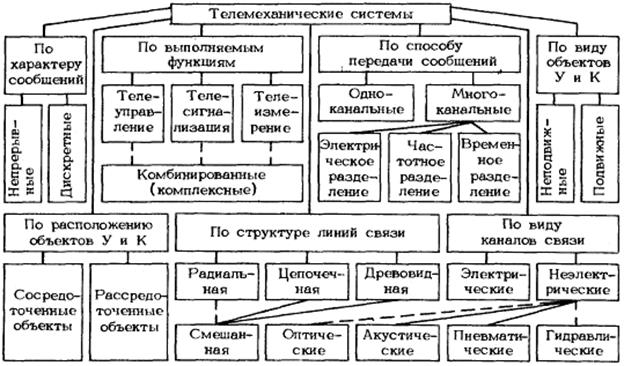
Рис. 1. Класифікація телемеханічних систем
Телемеханічні системи підрозділяють на системи телекерування та телеконтролю. Системи телеконтролю підрозділяють на системи телесигналізації та телевимірювання. Системи ТК здійснюють передачу команд від диспетчера до виконавчих механізмів. Системи ТС здійснюють передачу сигналів про стан контрольованого устаткування (положення роз'єднувачів, вимикачів потужності, стан автоматичних захистів і т.д.). Системи ТВ здійснюють передачу диспетчерові значення безупинно мінливих параметрів контрольованого виробничого процесу (значення напруги, частоти, потужності).
Телемеханізація нерозривно пов'язана з автоматизацією виробничих процесів. Необхідною умовою використання ТМС на промисловому підприємстві є оснащення виробничого процесу засобами автоматизації, пристроями захисту, контрольно-вимірювальними приладами та автоматичними виконавчими пристроями (електроприводами, регуляторами і т.д.). Чим більше розвинена автоматизація виробництва, тим більше ефективне застосування засобів телемеханіки. Тому телемеханізують виробництва, обладнані широко розвитому місцевою автоматикою. У цих випадках ТМС доставляють команду на початок якої-небудь операції (наприклад, на відключення трансформатора на підстанції), подальше ж виконання цієї операції проводиться місцевою автоматикою.
Системи керування.Залежно від відстані між керованим об'єктом і пунктом керування може застосовуватися місцеве, дистанційне або телемеханічне керування.
Місцеве керування з економічних міркувань доцільно застосовувати при не більш декількох десятків метрів. Це пов'язане з тим, що по сполучних проводах передається вся потужність, споживана керованим об'єктом, і тому при значній потужності об'єкта перетин проводів виходить великим.
При дистанційному керуванні по сполучних проводах передається не вся потужність, споживана керованим об'єктом, а тільки частина її, достатня для спрацьовування проміжного органа (звичайно релейного типу), називаного керуючим блоком. Наявність ланцюга керування є головною ознакою, що відрізняють дистанційне керування від місцевого.
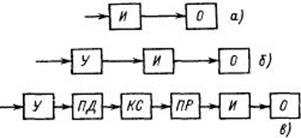
Рис. 8. Схеми систем керування:
а-місцевого; б — дистанційного; в— телекерування; И — виконавчий блок; ПРО — об'єкт керування; В —керуючий блок; ПД — передавальний блок; КС — канал святи; ПР — блок, що ухвалює.
Телемеханічне керування здійснює передачу команд на багато десятків і сотні кілометрів і є подальшим розвитком дистанційного керування. При дистанційному керуванні для передачі кожної команди керування необхідна окрема лінія зв'язку. При ТК одну лінію зв'язку застосовують для керування багатьма об'єктами шляхом посилки по ній спеціальних (кодованих) сигналів. У телемеханіку прийнятий двоступінчастий процес керування: спочатку диспетчер вибирає об'єкт (знаходить його адресу), а потім посилає команда («включити» або «виключити»).
Передача сигналів у ТМС відбувається по каналах зв'язку. Якщо лінія зв'язку — це фізичне середовище, по якім передають сигнали (наприклад, кабельні, повітряні лінії), то канал зв'язку — це сукупність технічних засобів, що забезпечують передачу повідомлень по лінії зв'язку від одного джерела одному приймачу. Для передачі повідомлень багатьом приймачам на одній і тій же лінії зв'язку за допомогою різних технічних засобів може бути організоване багато каналів зв'язку.
Принцип дії кожного виду ТМС і її конструкція багато в чому залежать від розташування телемеханізуємих об'єктів. За територіальною ознакою всі ТМС підрозділяють на ТМС для зосереджених і розосереджених об'єктів. Прикладом об'єктів першого типу є електричні підстанції, де в одному приміщенні перебуває велика кількість масляних вимикачів, що включаються, що й відключаються із ДП. Прикладом об'єктів другого типу є насосні установки на нафтопромислах, розкидані на великій території.
Передача телемеханічної інформації.Телемеханічна інформація носить різко виражений нерівномірний характер. При стаціонарному режимі в нормальних умовах має місце щодо невеликий потік інформації, при аварійних режимах - різке зростання («спалах») інформації. З погляду теорії інформації будь-яка ТМС є системою передачі повідомлень. Під повідомленням розуміють усе те, що підлягає передачі (об'єкт передачі), тобто певна сума відомостей. На відміну від повідомлення під інформацією розуміють відомості, що знаходяться в повідомленнях, які являють собою новизну. Інформація характеризує взаємовідношення між повідомленням і його одержувачем. Повідомлення передають за допомогою сигналів, які є матеріальними носіями інформації.
З погляду стійкості всі сигнали підрозділяють на статичні й динамічні. Для передачі телемеханічної інформації використовують динамічні сигнали; динамічні сигнали ділять на дискретні, що полягають із деякого числа посилок (елементів сигналу) з певними ознаками, і безперервні. У сучасних ТМС використовують, як правило, дискретні сигнали, однак зустрічаються й безперервні телемеханічні сигнали.
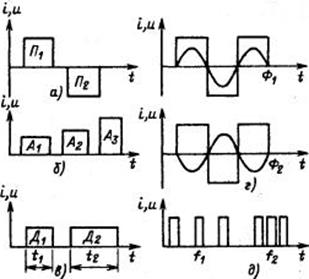
Рис. 12. Імпульсні ознаки:
а - полярний; 6 —амплітудний; в-часовий; г — фазовий; д — частотний
Передавальний пристрій ТМС формує дискретні сигнали з імпульсних посилок, яким надають певні якісні (імпульсні) ознаки. Чим більше помітних імпульсних ознак можна додати елементам сигналу, тем більше число повідомлень може містити телемеханічний сигнал. Максимальне число імпульсних ознак сигналу визначається особливістю прийомного пристрою надійно відрізняти ці ознаки один від іншого в умовах дії перешкод. Вибір виду імпульсних ознак залежить від типу каналу зв'язки, по якім передають сигнали.
До основних видам імпульсних ознак сигналу відносять наступні (мал. 12):
а) полярна ознака — імпульсні посилки відрізняються полярністю (позитивної або негативної), характеризуються високою завадостійкістю; полярна ознаку використовують тільки при застосуванні провідної лінії зв'язку;
б) амплітудна ознака - імпульсні посилки відрізняються по амплітуді; при кабельних лініях зв'язку відсутні викривлення; недостатня завадостійкість і складність прийомної апаратури при великій кількості амплітудних ознак приводять до використання двох значень амплітудної ознаки (великої й малої амплітуди);
в) часова ознака — імпульсні посилки відрізняються друг від друга тривалістю імпульсу й паузами між імпульсами; велика кількість посилок різної тривалості приводить до збільшення часу передачі сигналу, тому посилкам надають не більш двох-трьох значень по тривалості;
г) фазова ознака — імпульсні посилки відрізняються друг від друга по фазі стосовно деякого опорного сигналу, наявного в місці приймання;
л) частотна ознака - імпульсні посилки відрізняються друг від друга по частоті; частотна ознака є досить завадостійкою й дозволяє одночасно передавати кілька сигналів різної частоти по одній лінії зв'язку (провідний і бездротової).
Передача дискретних телемеханічних сигналів має переваги перед передачею безперервних сигналів: менша схильність викривленням у процесі передачі, значна простота виявлення цих викривлень, достатня зручність уведення в обчислювальні пристрої, відсутність необхідності розрізнення великої кількості сигналів, що як завгодно мало відрізняються друг від друга, і т.д.
Процес вистави безперервної функції деяким кінцевим числом її дискретних значень називається квантуванням. Заміна безперервного сигналу дискретним приводить до появи погрішності. Квантування сигналу здійснюють по амплітуді або за часом. Квантування широке застосовують у пристроях ТИ.
У телемеханіку для формування сигналів використовують кодування, що представляє собою процес перетворення повідомлення в дискретний сигнал у вигляді кодових комбінацій (цифр, букв і т.д.). Існує одноелементне й багатоелементне кодування. При одноелементнім кодуванні сигнали відрізняються друг від друга ознакою. При багатоелементнім кодуванні сигнали відрізняються друг від друга або числом елементів, або комбінацією елементів з різними ознаками.
Для керування більшістю телекерованих об'єктів потрібна передача тільки двох команд («включити», «відключити»), тому широке поширення в телемеханіку одержало одноелементне кодування.
Процес, зворотний кодуванню, називають декодуванням. Він полягає у виділенні сигналу з модульованого коливання.
Для передачі сигналів по каналу зв'язку необхідно мати переносник (носій), у якості якого використовують синусоїдальні коливання або безперервну послідовність імпульсів.
Процес зміни параметра носія інформації відповідно до переданого повідомлення (сигналом) називається модуляцією. Що модулює ( у цьому випадку телемеханічний) сигнал впливає на який-небудь параметр носія (несучих коливань): амплітуду, фазу, частоту. Залежно від модулюємого (змінюваного) параметра носія розрізняють амплітудну, фазову й частотну модуляції. Якщо ж у якості носія інформації служить безперервна послідовність імпульсів, то розрізняють амплітудно-імпульсну, частотно-імпульсну й фазоімпульсну модуляції.
У промисловій телемеханіці застосовують провідні лінії зв'язку (повітряні й кабельні). У порівнянні з кабельними, повітряні лінії піддаються зовнішнім перешкодам, мають меншу надійність, а також значно більшу залежність параметрів від метеорологічних умов і т.д. Найбільше часто використовують телефонні міські й низькочастотні кабелі далекого зв'язку.
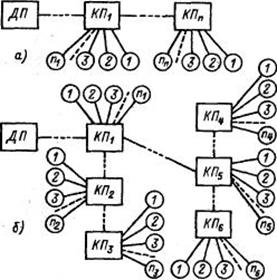
Рис. 17.13. Види структур ліній зв'язку:
а — ланцюгова; б —деревоподібна; 1, 2 — об'єкти телемеханіки.
Для телемеханіки застосовують телеграфний або телефонний канал, тобто виділяють певну смугу частот. Телемеханічні повідомлення перегавкають у смузі тонального діапазону (3400 — 5300 Гц), у високочастотному діапазоні (вище 5300 Гц), а також у смузі подтонального діапазону (0-300 Гц).
Більша частина промислових об'єктів належить до стаціонарних. Вони можуть бути розкидані поодинці або невеликими групами на великій площі (розосереджені об'єкти) або сконцентровані в одному пункті (зосереджені об'єкти). При цьому для обох випадків організація каналів зв'язку має свої особливості. Розрізняють радіальну, ланцюгова та деревоподібну структури ліній зв'язку, з яких найбільш простою є радіальна.
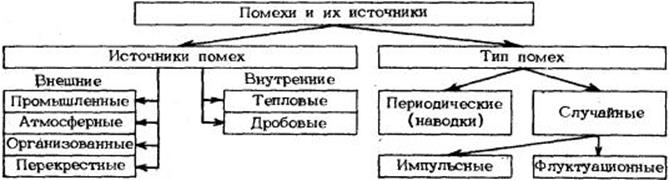
Рис. 14. Класифікація перешкод і їх джерел
Телевимірювання.При ТВ вимірювані (контрольовані) параметри перетворять в один уніфікований параметр (струм або напруга), зручний для передачі по каналу зв'язку ( лінії зв'язку). На мал. 15 представлена структурна схема ТВ Сукупність усіх технічних засобів, що здійснюють ТВ, називають телевимірювальним пристроєм. Для промислової телемеханіки характерне застосування єдиної багатоканальної системи ТВ з одним приймальним і одним передавальним пристроями, мережі об'єкти ТВ зосереджені в одному пункті, і багатьма розосередженими передавальними пристроями при розосереджених об'єктах ТВ.
Однієї з основних характеристик пристрою ТВ є погрішність, що характеризує відмінність показань відтворюючого приладу від дійсного значення телевимірюваного параметра.
Телевимірювальні пристрої класифікують по різних ознаках: принципу дії, дальності дії, роду вимірюваної величини. Однак найбільше часто для телевимірювальних пристроїв застосовують класифікацію по параметру, яких передається значення вимірюваної величини по каналу зв'язку. Відповідно до цієї класифікації телевимірювальні пристрої ділять на наступні групи:
1) струмові системи, що характеризуються тим, що вимірюваний параметр перетворять у струм, значення якого залежить від значень вимірюваного параметра;
2) системи напруги, що характеризуються тим, що вимірюваний параметр перетворять у напругу постійного або змінного токи, що подавати в лінію зв'язку;
3) частотні системи, що характеризуються тим, що вимірюваний параметр перетворять в імпульси постійного струму (частотно-імпульсні системи) або в змінний струм (частотні системи змінного струму); частота імпульсів або частота змінного струму відповідно залежить від значення вимірюваного парячи метра,
4) системи часу, що характеризуються тим, що вимірюваний параметр перетворять в:
а) тривалість імпульсів постійного струму (системи із широтно-імпульсною модуляцією);
б) тривалість інтервалу між опорним і інформаційним імпульсами (системи з інтервально- імпульсною модуляцією);
в) кут зрушення фаз між двома змінними струмами або напругами (фазові системи);
5) цифрові системи, що характеризуються тим, що вимірюваний параметр перетворять і передають по каналу зв'язку у вигляді цифрового коду, з певної комбінації імпульсів (кодоімпульсні системи або системи з кодоімпульсною модуляцією).
По методах, за допомогою яких передають значення вімірювального параметра, системи ТВ розбивають на три більші трупи пристроїв: інтенсивності, імпульсні й частотні. Імпульсні й частотні пристрої є пристроями далекої дії, пристрою інтенсивності - близької дії.
Телесигналізація та телекерування.На промислових підприємствах поряд з місцевим і дистанційним керуванням застосовують ТУ. За допомогою систем ТУ сигнали із ДП надходять на КП.
До систем ТУ висувають спеціальні вимоги, спрямовані на забезпечення виконання посланих наказів і виявлення помилок при їхній передачі. Вірогідність виконання наказу підвищується при наявності ТС із КП. Тому, як правило, пристрою ТК сполучають із пристроями ТС, утворюючи систему ТК - ТС.
ТС здійснюють автоматично або по викликові диспетчера, однак у всіх випадках ТС указує положення або зміна стану конкретного об'єкта. Крім того, ТС використовуєдля сигналізації про вихід якого-небудь параметра за заздалегідь установлені межі. Сюди ж ставиться аварійна сигналізація.
За принципом використовуваних каналів зв'язки пристрою ТУ - ТС ділять на пристрої близької дії, що працюють але провідним лініям зв'язку з радіусом дії близько 15-20 км, і універсальні пристрої, що працюють по будь-яких частотних каналах зв'язку з радіусом дії, що залежать від застосованої апаратури каналу зв'язки.
За структурою побудови пристрою ТК — ТС ділять на пристрої з незалежною апаратурою ТК і ТС, що поєднують у єдине конструктивне ціле дві незалежно працюючі схеми й пристрою, у яких одні в ті ж вузли використовують для ТК і для ТС (релейно-контактні пристрої).
У пристроях ТК і ТС застосовують три способи поділу сигналів (електричний, частотний і тимчасовий) і використовують ті самі методи й технічні засоби передачі сигналів. Специфіка пристроїв ТК — ТС обумовлює особливості передачі інформації в цих пристроях. Методи передачі інформації впливають на закони кодоутворення і принципи виконання прийомопередавальної апаратури.
За структурою використовуваних телемеханічних сигналів і методам їх передачі по каналах зв'язку системи ТК — ТС класифікують у такий спосіб:
1) з одноелементними сигналами, що не допускають їхню одночасну передачу;
2) з одноелементними сигналами, що допускають їхню одночасну передачу;
3) з багатоелементними сигналами й одночасною передачею їх елементів;
4) з багатоелементними сигналами й послідовною передачею їх елементів.
Дата добавления: 2017-01-29; просмотров: 3409;