Тема 3.1. Закони регулювання, автоматичні регулятори
Пристрій, який сприймає різницю між поточним і заданим значеннями регульованої величини та перетворює її у вплив на РО відповідно до закладеного в регулятор закону регулювання, називають автоматичним регулятором.
Нагадаємо, що елементи типового регулятора — це вимірювальний перетворювач, задатчик, підсилювач і регулюючий пристрій, який виробляє сигнал неузгодженості поточного і заданого значення регульованої величини, підсилює його та коректує відповідно до закону регулювання, подаючи сигнал регулюючого впливу.
Більшість систем автоматичного регулювання включає також ВМ командний сигнал, що перетворить, від регулятора у відповідний вплив на РО.
Основні типи регуляторів — позиційні та безперервної дії. Останні, у свою чергу, ділять на пропорційні (П), пропорційно-інтегральні (ПІ) і пропорційно – інтегрально - диференціальні (ПИД) регулятори (табл. 4.2).
Пропорційний (П) регулятор. Він переміщає РО на значення х, пропорційне відхиленню регульованої величини від заданого значення.
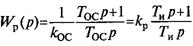
Диференціальне рівняння регулятора (р означає запис в операторной формі)
Тому у динамічному відношенні П-регулятор подібний безінерційній (пропорційній) ланці.
Параметр настроювання П-регулятора — коефіцієнт пропорційності кр, дорівнює переміщенню РО х при відхиленні регульованої величини y на одиницю її зміни.
При виборі структурної схеми будь-якого реального регулятора, у тому числі і пропорційного, вирішальне значення має передатна функція (ПФ) виконавчого механізму, яка може відповідати ПФ інтегруючої або пропорційної ланки. До першої групи відносяться електрорушійні ВМ, що забезпечують постійну швидкість при переміщенні РО, до другої — пневматично мембранні ВМ, у яких переміщення РО пропорційно регулюючому впливу.
Структурна схема П-Регулятора з ВМ першого типу наведено на малюнку 4.2, а. Закон регулювання формується за допомогою негативного зворотного зв'язку (НЗ)  по положенню РО, тобто на вхід пристрою НЗ надходить сигнал х з перетворювача переміщення ВМ.
по положенню РО, тобто на вхід пристрою НЗ надходить сигнал х з перетворювача переміщення ВМ.
Відповідно до правил перетворення структурних схем ПФ регулятора має вигляд

При великому коефіцієнті підсилення  ПФ спрощується
ПФ спрощується
 (4.1)
(4.1)
Для того щоб формула (4.1) була тотожна ПФ ідеального П-Регулятора  , необхідно виконати умову
, необхідно виконати умову  .
.
Таким чином, НЗ повинна бути виконана у вигляді безінерційної ланки з коефіцієнтом підсилення  .Таку НЗ називають твердою. Відповідно, параметр настроювання П-Регулятора — коефіцієнт пропорційності кр задається параметрами ланки НЗ.
.Таку НЗ називають твердою. Відповідно, параметр настроювання П-Регулятора — коефіцієнт пропорційності кр задається параметрами ланки НЗ.
Перехідна характеристика реального П-Регулятора трохи відрізняється від характеристики ідеального в початковій своїй частині через обмежену швидкість ВМ.
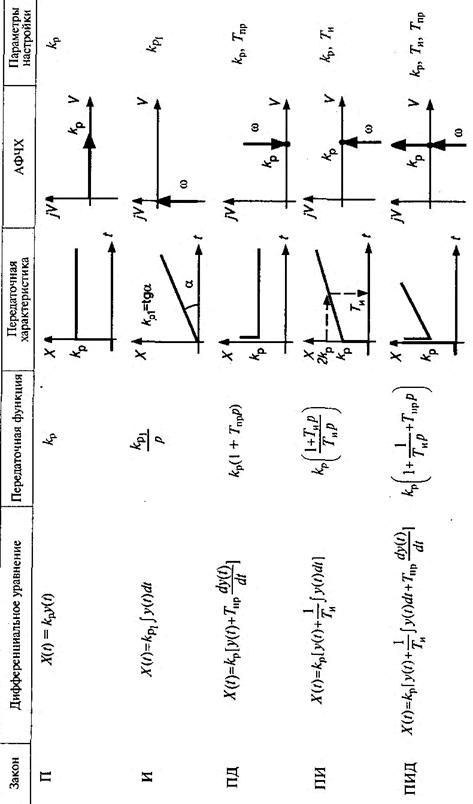

Рис. 4.2. Структурні схеми П-Регулятора (а) і Й-Регулятора (б):
1 — підсилювач; 2 — виконавчий механізм; 3 — иепь зворотному зв'язка
Пропорційні регулятори дозволяють стійко працювати практично в будь-яких технологічних системах. Однак їх недолік — залежність регульованої величини від навантаження об'єктів.
Інтегральний (И) регулятор. Він переміщає РО пропорційно інтегралу від сигналу неузгодженості.
Рівняння регулятора (в операторній формі) 
Таким чином, у динамічнім відношенні І-Регулятор подібний інтегруючої ланки. Параметр настроювання І-Регулятора kp1 — коефіцієнт пропорційності — характеризує залежність швидкості переміщення регулювального органа від значення відхилення регульованого параметра.
Структурная схема серійного П-Регулятора показано на малюнку 4.2, 6. Передатні функції елементів схеми визначаються наступними вираженнями
 (4.2)
(4.2)
Передатна функція всієї схеми
 (4.3).
(4.3).
Після підстановки у формулу (4.3) значень ПФ із формули (4.2), розподілу чисельника й знаменника на k і відкидання за малістю 1/k одержуємо ПФ І-Регулятора (Ти — постійна часу ВМ, величина, зворотна kp1)

І-Регулятори підтримують параметр без його відхилень, однак можуть стійко працювати тільки на об'єктах, що мають значне самовирівнювання.
Пропорційно-диференціальний (ПД) регулятор. Він переміщає РО на значення х, пропорційне сумі відхилення й швидкості (диференціала) відхилення регульованої величини в(р).
Рівняння регулятора (в операторній формі)

Таким чином, у динамічнім відношенні ПД-Регулятор подібний системі із двох паралельно включених ланок: безінерційної з коефіцієнтом пропорційності kp і диференціальної з коефіцієнтом kpТд.
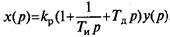
Пропорційно-інтегральний (ПІ) регулятор. Він переміщає РО на величину х, пропорційну сумі відхилення й інтеграла від відхилення регульованої величини у.
Рівняння регулятора (в операторній формі)
Таким чином, у динамічнім відношенні Пі-регулятор подібний системи із двох паралельно включених регуляторів: пропорційного з коефіцієнтом пропорційності kp і інтегрального з коефіцієнтом пропорційності kp/Ти. Звідси випливає, що в Пі-регулятора два параметри настроювання: коефіцієнт пропорційності kp і час подвоєння Ти. При цьому Ти як випливає из таблиці 2, може бути визначене як час, за який вихідний сигнал регулятора х змінюється від kp до 2 kp, тобто подвоюється.
Структурна схема Пі-регулятора показано на малюнку 4.3 у двох варіантах: з охватом і без охвату ВМ негативної НЗ.
У першому варіанті (мал. 4.3, а) пристрій НЗ повинне мати характеристику реальної ланки, що диференціює

де kд і Тд — коефіцієнт підсилення й постійна часу, що диференціює ланки.
Тоді, як було відзначено раніше, при досить великому коефіцієнті підсилення  ПФ регулятора
ПФ регулятора
 , або
, або 
якщо прийняти 
Таким чином, у першому варіанті виконання регулятора ПФ виконавчого механізму не впливає на формування закону регулювання, який повністю визначається характеристикою пристрою НЗ. У серійних Пі-регуляторах цього типу в якості НЗ використовують різні електричні, пневматичні або гідравлічні пристрої — аналоги ланки, що реально диференціює. Таку НЗ називають пружною або гнучкої.
У другому варіанті виконання Пі-регулятора (мал. 4.3, б) можливі два випадки, коли виконавчий механізм має характеристику інтегруючого або пропорційної ланки.
В обох випадках при досить великому коефіцієнті підсилення маємо

Якщо  , а НЗ виконана у вигляді аперіодичної ланки 1-го порядку
, а НЗ виконана у вигляді аперіодичної ланки 1-го порядку  , то одержуємо ПФ Пі-регулятора
, то одержуємо ПФ Пі-регулятора
 (4.4)
(4.4)
де обоє параметра настроювання  також визначаються параметрами вузла НЗ.
також визначаються параметрами вузла НЗ.
Якщо в ВМ характеристика пропорційної ланки, то для реалізації Пі-регулятором закону регулювання ланка НЗ повинне мати характеристику реальної ланки, що диференціює.
При збільшенні постійної часу Ті такий ПІ-регулятор перетворюється в П-Регулятор, а пристрій НЗ — у безінерціну ланку.
У більшості електричних регуляторів, що серійно випускаються, використовують ВМ з постійною швидкістю переміщення, що й мають структурну схему (мал. 4.3, б), у якості другого щабля посилення використовують трипозиційний релейний елемент.
Такий принцип реалізований у великій кількості регуляторів, використовуваних у сільськогосподарськім виробництві (Р-25, РС-29, РП-4 і ін.).
Пі-регулятори, відрізняючись простотою конструкції, забезпечують висока якість стабілізації параметра незалежно від навантаження об'єкта.
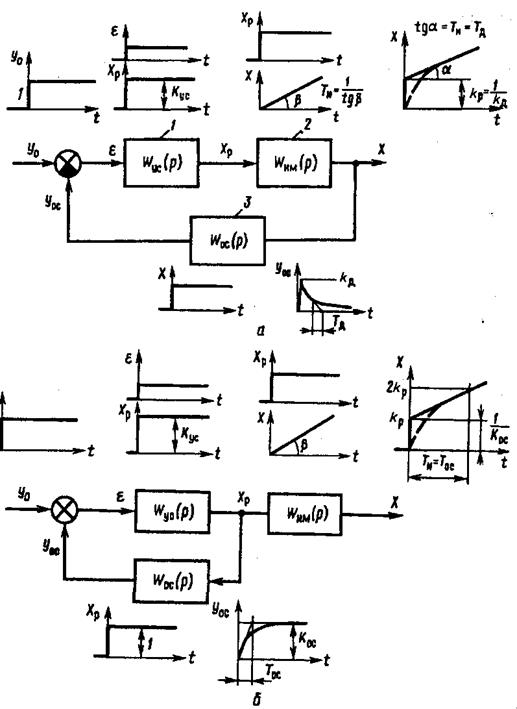
Рис. 4.3. Структурні схеми Пі-регулятора з охватом (в) і без охвату (б) ВМ ланцюгом негативного зворотного зв'язку:
1 — підсилювач; 2 — виконавчий механізм; 3 — зворотний зв'язок
Пропорційно-інтегрально-диференціальний (ПІД) регулятор. Він переміщає РО пропорційно відхиленню, інтегралу та швидкості відхилення регульованої величини.
Рівняння регулятора (в операторній формі)
Таким чином, у динамічнім відношенні ПІД-Регулятор подібний системи із трьох паралельно включених ланок: пропорційного — з коефіцієнтом пропорційності kp, інтегрального — з kp/Ти, що та диференціює — з kpТд.
Відповідно, у ПІД-регулятора три параметра настроювання: коефіцієнт пропорційності kp, час інтегрування Ти та час диференціювання Тд.
На практиці аналоговий ПІД-регулятор виконують по тій же структурній схемі, що й ПІ-регулятор (мал. 4.3, а), але пристрій НЗ  у цьому випадку повинне мати ПФ виду аперіодичної ланки другого порядку. Звичайно ПІД-закон регулювання реалізується шляхом включення послідовно коригувального пристрою у вигляді інтегрально-диференційного звена. Він виробляє сигнал, який переміщає РО в одне з фіксованих положень (позицій). Цих положень може бути два, три і більше, відповідно розрізняють двох-, трьох- і багатопозиційні регулятори.
у цьому випадку повинне мати ПФ виду аперіодичної ланки другого порядку. Звичайно ПІД-закон регулювання реалізується шляхом включення послідовно коригувального пристрою у вигляді інтегрально-диференційного звена. Він виробляє сигнал, який переміщає РО в одне з фіксованих положень (позицій). Цих положень може бути два, три і більше, відповідно розрізняють двох-, трьох- і багатопозиційні регулятори.
Рівняння автоматичної системи регулювання з позиційним регулятором визначається статичною характеристикою регулятора.
Статична характеристика найпоширенішого із цієї групи регуляторів — двопозиційного показано на малюнку 4.4, а.
Величина 2а визначає зону неоднозначності регулятора. При зміні вхідної величини в (вона ж — вихідна величина об'єкта) щодо заданого значення на а вихідна величина х (регулюючий вплив) стрибком досягнеться свого максимального значення В1. При зменшенні х на те ж значення про вихідна величина також стрибком досягнеться значення В2, причому в загальному випадку В1≠В2.
Таким чином, двопозиційні регулятори мають два параметри настроювання: зона неоднозначності 2а й регулюючий вплив В.
Характерна риса системи регулювання із двопозиційВМ регулятором — автоколивальний характер зміни регульованої величини в. Параметри автоколивань — амплітуда Ак і період Т залежать від властивостей об'єкта регулювання (Тоб, Коб, τ) і параметрів настроювання регулятора.
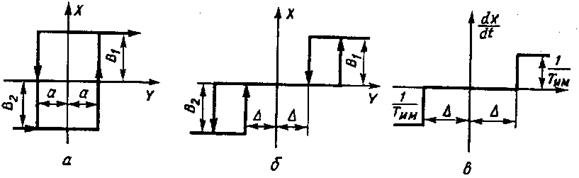
Рис. 4.4. Статичні характеристики позиційних регуляторів (а...в)
Трипозиційні регулятори (мал. 4.4, б)на відміну від двопозиційних крім двох стійких положень — «більше» В1 і «менше» В2 — забезпечують ще й третє — «норма». Органі настроювання трипозиційного регулятора дозволяють установлювати зону нечутливості 2Δ і значення регулюючого впливу В.
Переваги трипозиційного регулювання перед двопозиціоним полягають у відсутності автоколивань при зміні -Δ<y<+Δ малім значенні амплітуди коливань регульованої величини.
Позиційні регулятори можуть працювати також і з ВМ, що забезпечують постійну швидкість переміщення РО. Статична характеристика такого регулятора наведено на малюнку 4.4, е. Відповідно до цієї характеристики швидкість переміщення РО dx/dt змінюється стрибкоподібно, досягаючи значення 1/Тім, де Тім — час повного ходу ВМ.
Релейні регулятори крім зони нечутливості мають також і зону неоднозначності.
Системи автоматичного регулювання з позиційВМи регуляторами застосовують при автоматизації ТП сільськогосподарського виробництва. Це стало можливим завдяки таким їхнім перевагам, як простота технічних способів керування енергетичВМи потоками, зручність комбінації релейного елемента з ВМ постійної швидкості, що переміщають РО, а також завдяки дешевині, надійності й простоті настроювання самих регулюючих пристроїв.
Дата добавления: 2017-01-29; просмотров: 5225;