Розділ 5 Автоматизація технологічних процесів ГМС Автоматизація головних водозабірних вузлів. Автоматизація насосних станцій. Автоматизація водорозподілу.
У сільськогосподарському виробництві насосні пристрої застосовуються у системах водопостачання, зрошування та каналізації.
Системи водопостачання призначені для добування, очищення та розподілу води для технічних і господарських потреб. Автоматичні системи керування насосними станціями систем водопостачання призначені для автоматичного запуску і зупинки насосів за певною програмою, автоматичного регулювання подачею насосів, вмикання резервного насоса, захисту електродвигунів, сигналізації нормальної роботи та аварійних зупинок, вимірювання тиску та рівня води, сили струму, який споживає електродвигун та напруги. Затрати ручної праці на подачу води у тваринницькі ферми становлять 30% від усіх робіт, а застосування автоматизованого електропривода збільшує продуктивність праці на цих операціях у 18-20 разів.
До сільськогосподарських споживачів воду в основному подають через водонапірний котел чи водонапірний бак, за допомогою відцентрових насосів, які приводяться в рух асинхронними електродвигунами. Безпосередньо від насоса у розподільчу мережу воду подають у відкритих зрошувальних системах із приводом від асинхронних чи синхронних двигунів. Для забирання води з відкритих водоймищ, а також із шахтних криниць і свердловин із динамічним рівнем води у них не глибше 5-7 м від поверхні землі, переважно застосовують відцентрові насоси типів К, КМ і ЦВ та вихрові насоси типів В, ВК і ВКС. З глибинних шахтних криниць та свердловин воду піднімають за допомогою водострумних пристроїв ВН та заглибних електронасосів типів ЭЦВ, ЭПН, ЭПЛ, АП, АПВ і АПВМ.
Для того, щоб вибрати тип і потужність електронасосного пристрою та їх кількість, необхідно, виходячи з місцевих умов, вибрати схему водопостачання. При виборі насоса виходять із його необхідної подачі QНта напору Н, який він повинен створювати. Подачу насоса знаходять із співвідношення:
 ,
,
де  - коефіцієнт нерівномірності погодинної витрати (для поселень =1,5; для ферми з автонапувалками =2...3, для ферми без автонапувалок =4...5);
- коефіцієнт нерівномірності погодинної витрати (для поселень =1,5; для ферми з автонапувалками =2...3, для ферми без автонапувалок =4...5);  - коефіцієнт нерівномірності добової витрати ( =1,1.. .1,3);
- коефіцієнт нерівномірності добової витрати ( =1,1.. .1,3);  - ККД пристрою, який враховує втрати води ( = 0,9);
- ККД пристрою, який враховує втрати води ( = 0,9);
 - середньодобова витрата води, (л/доб.) ;
- середньодобова витрата води, (л/доб.) ;
 - норма води на одного споживача (корова, свиня, птах, технологічний процес, автомобіль), л/доб;
- норма води на одного споживача (корова, свиня, птах, технологічний процес, автомобіль), л/доб;
 - число споживачів даного виду.
- число споживачів даного виду.
При розрахунку водопостачання, зокрема, враховують пожежну витрату води (2,5-10 л/с) залежно від розмірів господарства чи населеного пункту, тривалість пожару приймають рівною 2-3 год. Цю витрату зобов'язані забезпечити насосний агрегат та водопровідна мережа або на нього повинна бути розрахована запасна ємність. Напір насоса вибирають таким чином, щоб він міг подавати воду при необхідному тиску у заданому місці.
Необхідний напір насоса Нвизначають із залежності:
Н = НВ + НН + НТ + Н1, [м],
де НВ- висота всмоктування;
НН - найбільша висота водоспоживачів;
НТ - напір втрат у трубопроводах;
Н1 - напір, який необхідний для створення певної швидкості витікання води (вільний напір).
Знаючи потрібні витрати та напір, за каталогом вибирають насос з урахуванням можливої частоти обертання привідного електродвигуна. За універсальною характеристикою вибраного насоса уточняють його подачу QН, напір Ні визначають коефіцієнт корисної дії.
Потужність двигуна для приводу насоса:
 ,
,
де  - питома вага рідини, що перекачується, Н/м3;
- питома вага рідини, що перекачується, Н/м3;  - ККД передачі (при прямому з'єднані валів =1, для клинопасової передачі =0,98, для зубчатої =0,97, для плоскопасової =0,95);
- ККД передачі (при прямому з'єднані валів =1, для клинопасової передачі =0,98, для зубчатої =0,97, для плоскопасової =0,95);
 - ККД насосів (поршневих =0,7...0,9, відцентрових =0,4...0,8, вихрових =0,25... 0,5);
- ККД насосів (поршневих =0,7...0,9, відцентрових =0,4...0,8, вихрових =0,25... 0,5);  - коефіцієнт запасу, що вибирається з табл. 1.
- коефіцієнт запасу, що вибирається з табл. 1.
Таблиця 1
Коефіцієнти запасу
| Р, кВт | ≤1 | ≥10 | |||||
|
| 1,7…2 | 1,5 | 1,33 | 1,25 | 1,2 | 1,12 | 1,05…1 |
Для відцентрових насосів особливо важливо правильно вибрати кутову швидкість, оскільки його продуктивність, пропорційна кутовій швидкості, напір і момент квадрату кутової швидкості, а потужність її кубу:

Тип електродвигуна вибирають, виходячи з умов навколишнього середовища та особливостей монтажу. Наприклад, для приводу заглибних насосів типу ЭЦВ застосовують спеціальні двигуни типу ПЭДВ потужністю 0,7-65 кВт, які мають видовжену форму корпусу і розраховані на роботу у свердловинах діаметром від 100 до 250 мм при подачі на висоту до 350 м. Підшипникова пара заглибних двигунів являє собою пару ковзання: сталь - гума, сталь - текстоліт чи сталь - пластик. Маса ротора сприймається підп'ятником, який складається зі сталевої п'яти, насадженої на кінець вала ротора та гумового чи текстолітового кільця, яке запресовується у розточку підшипникового щита. Підшипники змащуються водою. Перед вмиканням заглибного електродвигуна в його внутрішню порожнину необхідно обов'язково залити чисту воду. Обмотка статора двигуна виконується проводом із поліхлорвініловою вологостійкою ізоляцією. Заглибні електронасоси залежно від рівня залягання водоносного шару експлуатують на глибинах 40-230 м. Термін служби заглибних електродвигунів до капітального ремонту відносно невеликий - 1...1,5 року.
Для приводу незаглибних відцентрових насосів типу К та КМ та вихрових насосів використовують асинхронні короткозамкнуті двигуни сільськогосподарського виконання або двигуни з фазним ротором із вологостійкою ізоляцією потужністю 1,5...55 кВт.
Механічна характеристика відцентрового насоса має вентиляторний вигляд і описується формулою:
 ,
,
де  - момент опору при кутовій швидкості,
- момент опору при кутовій швидкості,  ;
;  - момент опору при номінальній кутовій швидкості,
- момент опору при номінальній кутовій швидкості,  ;
;  - момент опору від сил тертя у рухомих частинах машини для відцентрового насоса =0,05 ; х - показник степеня, для відцентрового насоса х = 2.
- момент опору від сил тертя у рухомих частинах машини для відцентрового насоса =0,05 ; х - показник степеня, для відцентрового насоса х = 2.
Відцентровий насос можна запускати як при відкритій, так і при закритій засувці на напірному трубопроводі.
Подачу насосних пристроїв можна регулювати шляхом включення і відключення одного або декількох двигунів (у випадку застосування декількох електронасосів), зміною частоти їх обертання та дроселюванням засувкою.
Двохпозиційне релейне регулювання застосовується у більшості автоматичних пристроїв. У цьому випадку двигун працює в області номінальних навантажень із достатньо високими техніко-економічними показниками. Недоліки даного способу полягають у тому, що двигун частину часу не працює, а отже, коефіцієнт використання його встановленої потужності менший одиниці та пропорційний відносній тривалості включення. Окрім того, при збільшенні частоти включень двигуна за годину (нормальне допустиме число включень за годину рівне 6) його нагрівання може перевищити допустиме, тому привід повинен перевірятись на допустиму частоту включень.
Регулювання при дроселюванні засувкою призводить до непродуктивних затрат потужності електродвигуна на переборення додаткового опору у прикритій засувці і застосовується на напірній магістралі в пристроях із синхронними двигунами потужністю у декілька кіловат при невеликому діапазоні та плавності регулювання, коли застосування інших методів призводить до значного зростання капітальних затрат і не дає істотної економії за рахунок зниження втрат.
Регулювання подачі електронасоса шляхом зміни частоти обертів є одним із найбільш раціональних способів. Частоту обертів асинхронного двигуна можна регулювати шляхом зміни напруги, що підводиться до двигуна, переключенням числа пар полюсів, зміни опору у колі ротора чи частоти струму живлення, а також, за допомогою електромагнітної муфти чи клинопасової передачі з варіатором.
При надійному електропостачанні і невеликих погодинних витратах (1,6...36 м3/год) на фермах можуть застосовуватись насосні пристрої з повітряно-водяним котлом, заглибним, лопатним чи вихровим насосом і станцією керування типу ВУ (див. мал. 10.1).
Насосний пристрій типу ВУ працює таким чином: вода, яка подається насосом 1, йде до споживачів, а її надлишок - у повітряно-водяний котел 2, де вода піднімається й стискає повітря, яке знаходиться у котлі. Коли тиск води у котлі досягає певного значення, реле тиску 6 своїми контактами SР відключає електронасосний агрегат і подача води зупиняється. Після чого вода до споживачів подається під тиском повітря у котлі. Поверненню води назад до водоймища через насос протидіє зворотній клапан.
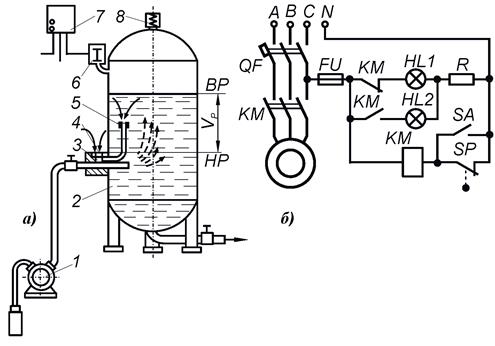
Рис. 1 - Технологічна (а) та електрична (б) схеми насосного пристрою із повітряно-водяним котлом і станцією керування ВУ: 1 - насосний агрегат; 2 - повітряно-водяний котел; 3 - камера змішування регулятора; 4 - повітряний клапан; 5 - жиклер; 6 - реле тиску; 7 - станція керування; 8 - запобіжний клапан
У міру витрати води тиск у котлі понижується і коли він досягає встановленого мінімального значення, реле тиску включає насосний агрегат. Звичайно, відношення мінімального тиску (вмикання) до максимального (вимикання) складає 0,65...0,75 для пристроїв невеликої подачі і 0,8...0,85 для пристроїв із великою подачею. Повітряна подушка котла пом'якшує гідравлічні удари, які виникають при перехідних режимах роботи електронасосного пристрою.
У повітряно-водяних котлах повітря безпосередньо контактує з водою, в результаті чого частина його розчиняється й виноситься водою, що зменшує об'єм повітряної подушки. Це може призвести до порушення нормальної роботи пристрою і більш частих включень агрегату. Для автоматичного підтримування необхідного об'єму повітряної подушки застосовується розподільна діафрагма або струменевий регулятор, за допомогою якого повітряна подушка поповнюється повітрям.
У повітряно-водяних котлах запас води порівняно невеликий, тому при великих погодинних витратах води, зростає частота вмикання насосного агрегату, що може призвести до перегрівання електродвигуна й виходу його з ладу. Збільшення об'єму котла істотно підвищує його вартість, тому при великих годинних витратах води використовують баштові насосні пристрої з водонапірними баками.
Автоматичні системи керування баштових насосних пристроїв повинні виконувати такі функції:
- автоматичне вмикання електродвигуна при випорожненні водонапірного бака нижче встановленого рівня й вимикання електродвигуна при заповненні водонапірного бака вище верхнього встановленого рівня та при зниженні рівня води у свердловині (захист від сухого ходу);
- ручне керування водонаносного пристрою;
- вимикання електродвигуна при коротких замиканнях, перевантаженнях, обриві фази, значному зниженні напруги;
- сигналізацію про роботу системи керування та про завантаження двигуна.
Контроль за рівнем води у водонапірному баку може здійснюватись за допомогою поплавкових чи електродних датчиків рівня та електроконтактних манометрів. Поплавкові датчики рівня мають низьку надійність роботи внаслідок наявності рухомих механічних частин.
Електродні датчики рівня (рис. 2) використовують провідність води для проходження електричного струму і надійно працюють при позитивних температурах, а при морозі відмовляють у роботі, оскільки електроди покриваються кригою, яка має низьку провідність і швидко окислюються. Для запобігання замерзанню електродних датчиків рівня (як правило, датчика верхнього рівня) використовують нагрівальний опір НО потужністю 80...100 Вт, який включається на зимовий період від руки. Оскільки для електричного зв'язку датчиків рівня, які розміщені у баку і станції керування, необхідні з'єднувальні проводи значної протяжності, то у нових станціях керування насосними пристроями для контролю за рівнем води у водонапірних баках використовуються електроконтактні манометри, які встановлюються у приміщенні насосної станції і можуть реєструвати перепад статичного тиску стовпа рідини у системі водопостачання при зміні рівня води на 1...2 м.
Заглибні насоси, як правило, поставляють разом із станціями керування та релейно-контактними елементами ПЭТ або напівпровідниковими пристроями (логічними елементами, мікросхемами) типу ШЭП та «Каскад», які відрізняються також за потужністю керованого двигуна і виготовляються двох габаритів для двигунів потужністю 10...12 кВт і 16...65 кВт. Перші дві станції зняті з виробництва, але у господарствах ще використовуються.
Розглянемо прості схеми автоматичного керування насосних пристроїв, які розповсюджені у сільському господарстві і за допомогою яких можна вияснити принцип роботи типових станцій типу ШЭП, «Каскад» та інших. Електричну схему автоматизованого керування заглибних насосів за допомогою електродних датчиків рівнів у водонапірному баку й електродного датчика сухого ходу у свердловині приведено на рис. 3.
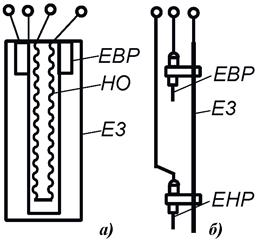
Рис. 2 - Електродні датчики рівня: а) - трубчатий датчик; б) - стержневий датчик; ЕЗ - загальний електрод з'єднаний із нульовим проводом мережі; ЕВР - електрод верхнього рівня; ЕНР - електрод нижнього рівня; НО - нагрівальний опір
За нормальних умов роботи заглибний насос знаходиться у воді й контакти (електроди) датчика сухого ходу SL3 замкнуті, реле КV2 ввімкнено, його замикаючі контакти КV2.1 у колі котушки магнітного пускача КМ замкнуті, горить сигнальна лампочка HL4, яка сигналізує про наявність води у свердловині (у зоні насоса). Режим роботи схеми задається перемикачем SА1. При переключенні його у положення А (автоматичне керування) і вмиканні автоматичного вимикання QF, на схему керування подається напруга. Якщо рівень води у напірному баку знаходиться нижче електрода нижнього рівня датчика, то контакти (електроди) SL1 і SL2 - розімкнуті, реле КV1 знеструмлене і його контакти КV1 у колі котушки магнітного пускача КМ замкнуті. У цьому випадку магнітний пускач спрацьовує й включає електродвигун насоса, одночасно гасне сигнальна лампочка HL1 і загоряється лампочка HL2. Насос подаватиме воду до напірного бака й рівень води у ньому підніматиметься. Коли вода заповнить проміжок між електродом нижнього рівня і корпусом датчика, який під'єднаний до заземленого нульового проводу, контакти SL2 замкнуться, але реле КV1 не спрацює, оскільки його контакти КV1.2, які включені послідовно з контактами SL2, розімкнуті. Коли вода досягне електрода верхнього датчика рівня, контакти SL1 замкнуться, реле КV1 спрацює й розімкне свої контакти КV1.1 у колі магнітного пускача КМ і вимкне останній, а також замкне замикаючі контакти КМ.2, магнітний пускач КМ відключить своїми головними контактами електродвигун, а допоміжними контактами вимкне сигнальну лампочку HL2 і ввімкне лампочку HL1. Повторне вмикання електродвигуна насоса відбудеться призниженні рівня води до положення, коли розімкнуться контакти (електроди) SL2 і реле КV1 знеструмиться.
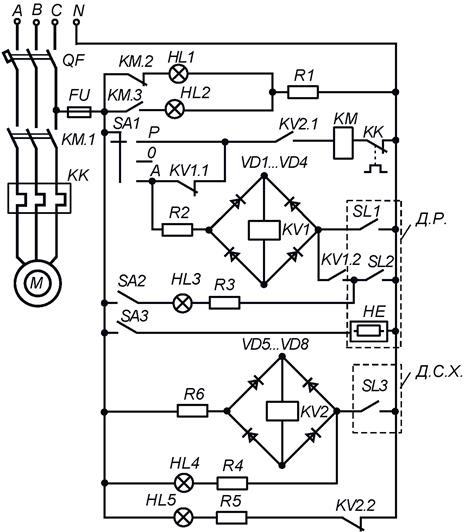
Рис. 3 - Електрична схема автоматизації заглибного насоса за рівнем води у водонапірній вежі
Реле КV1 живиться постійним струмом, оскільки обмотка реле змінного струму може перегоріти при повільному заповненні водою верхнього датчика рівня і повільному зменшенні опору води та зростанні струму до величини струму спрацювання, який при розімкнутому магнітопроводі у декілька разів більший від номінального струму. Опір R2 вибирають таким, щоб при напрузі мережі 220 В на обмотці реле КV1 була напруга 24 В постійного струму.
У випадку аварійного зниження рівня води у свердловині (у зоні заглибного насоса) нижче допустимого положення розімкнуться контакти (електроди) датчика сухого ходу SL3, реле КV2 знеструмиться й розімкне контакти КV2.1 у колі котушки магнітного пускача КМ, який вимкне електродвигун заглибного насоса. Лампочка HL4 погасне, а HL5 загориться, сигналізуючи про аварійне зниження рівня води у свердловині.
Для захисту електродвигуна заглибного насоса від перевантажень, замість теплових реле може використовуватись пристрій ФУЗ-М, який більш надійно захищає двигун заглибного насоса як від перевантажень так і від неповно фазних режимів роботи.
На рис.4 приведена електрична схема автоматизованого керування заглибним насосом з водонапірним баком за допомогою електроконтактного манометра. При наявності води у свердловині у зоні заглибного насоса, контакти (електроди) датчика сухого ходу SL будуть замкнутими, а реле КV2 триматиме замкнутими свої контакти КV2.1 у колі котушки магнітного пускача КМ. В автоматичному режимі при вимкненому насосі рівень води у баку знижується, коли вона витрачається,а отже, зменшується тиск водяного стовпа, рухомий стрілковий контакт манометра SР буде рухатись до нерухомого контакту 1, положення якого встановлюється відповідно до тиску, який створює водяний стовп при нижньому рівні води у баку. При замиканні цих контактів струм поступає на магнітний пускач КМ, який вмикає електродвигун заглибного насоса і своїми замикаючими контактами КМ.2 шунтує контакти 1 та SР.
При вмиканні електронасосного агрегату у напірному трубопроводі виникає короткочасне підвищення тиску у момент трогання насоса. У цьому випадку рухомий контакт манометра SР може торкнутись контакту 2 і реле КV1 може короткочасно розімкнути свої контакти у колі котушки пускача КМ, але пускач не вимикається, оскільки його живлення здійснюватиметься через контакти реле часу КТ. Після роз гону електронасосного агрегату й стабілізації тиску, реле часу розімкне свої контакти КТ. При підніманні рівня води у напірному баку тиск водяного стовпа зростатиме і рухомий стрілковий контакт манометра SР рухатиметься до нерухомого контакту 2, положення якого встановлюється відповідно до тиску, який створює водяний стовп при верхньому рівні води у баку. При замиканні цих контактів, струм надійде до реле КV1, яке розімкне свої контакти КV1.1. і вимкне магнітний пускач КМ, який, у свою чергу, вимкне електродвигун насоса. При витраті води, її рівень у напірному баку знову знижуватиметься, тиск зменшиться і контакт SР знову доторкнеться до контакту 1. Робота схеми повториться.

Рис. 4 - Електрична схема автоматизації заглибного насоса за тиском водяного стовпа водонапірної вежі
Для гасіння короткочасних зростань тиску, які діють на електроконтактний манометр у моменти трогання насоса, на відгалуженні до манометра встановлюють дроселі з малими отворами або регульовані вентилі. У таких випадках реле часу у схемі на рис. 4 не потрібне.
Станції керування ШЭП відрізняються від попередніх тим, що всі кола керування виконані на безконтактних логічних елементах, змонтованих у блок БЛ-4М. Силові кола залишені такими ж, до них входить автоматичний вимикач та електромагнітний пускач. Безконтактні апарати керування мають більшу надійність порівняно з релейно-контактними. Середній строк служби логічних елементів 40 тис. годин при набагато вищій швидкодії (можуть працювати з частотою до 10 кГц) і захищеності від дії навколишнього середовища. Окрім того безконтактні пристрої не потребують регулювань і наладки. Станції керування ШЭП виконують ті ж функції, що і попередні схеми керування, окрім того дозволяють автоматичне керування електронасосом у режимі дренажу, залежно від рівня води у свердловині за допомогою встановлених у ній датчиків рівня. Окрім того, захист двигуна від перевантажень та обриву фази виконаний на логічних елементах із контролем струму навантаження має вищу надійність і швидкодію. Ця станція також знята з виробництва, але у господарствах ще використовується.
Найпоширенішими у даний час є станції керування «Каскад», які комплектуються скриньками керування, ЯНН5110 або ЯН 5100 і випускаються у двох виконаннях: для керування двигунами потужністю до 12кВт та двигунами потужністю від 16 до 65 кВт. Залежно від типу скриньки керування станція «Каскад» може виконувати такі функції:
- автоматичний запуск і зупинку електронасоса залежно від рівня води у режимі водопіднімання та дренажу;
- автоматичний запуск електронасоса в режимі водопіднімання залежно від тиску водяного стовпа у башті, та його автоматичну зупинку через заданий оператором проміжок часу (до 90 хв);
- селективний автоматичний запуск насосів із регульованою витримкою часу;
- місцевий (від руки) та телемеханічний запуск і зупинку двигуна;
- вимикання електронасоса при зниженні рівня води у свердловині (захист від сухого ходу) та при перевантажені;
- неможливість повторного автоматичного запуску після спрацювання будь-якого захисту;
- світлову сигналізацію з розшифровкою причини аварійної зупинки;
- контроль завантаження двигуна струмом.
Усі функції автоматичного керування, сигналізації та захисту двигуна від аварійних режимів (окрім коротких замикань) виконує блок керування типу БОН-9200, виконаний на напівпровідникових елементах.
Дата добавления: 2017-01-29; просмотров: 2209;