Передаточная функция для ошибки по помехе.
Системы автоматического управления работают, как правило, в условиях помех. При этом задающее воздействие g(t) всегда приложено к входу системы, а помеха V(t) может быть приложена в произвольной точке системы, как показано на рисунке. Разомкнутый контур разделен на две части. W1(p)- не подвержена воздействию помех, а на входе второй W2(p) действует помеха V(t). При этом W(p)=W1(p)  W2(p).
W2(p).
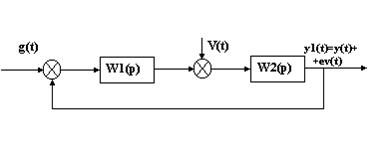
Рисунок 6‑3
Выходная величина САУ может быть представлена в виде
y1(t)=y(t)+ev(t) (6.19)
где y(t)=Wз(p) g(t) - реакция системы на задающее воздействие.
Ev(t)=  (6.20)
(6.20)
Составляющая ev(t) выходной величины y1(t) искажает значение управляемой величины y(t), т.е. является ошибкой системы, обусловленной помехой V(t).
Отношение изображенияEv(p)этой ошибки к изображению помехиV(p)определяетпередаточную функциюсистемы автоматического управлениядля ошибке по помехе:
Hev(p) =  (6.21)
(6.21)
Если помеха действует на входе системы, то получаем:
Hev(p)=  =Wз (6.22)
=Wз (6.22)
Частотные функции
Если входное возмущение представляет собой гармоническое колебание  , то передаточная функция превращается в частотную функцию или в частотную характеристику линейной системы
, то передаточная функция превращается в частотную функцию или в частотную характеристику линейной системы

 ; называется частотной передаточной функцией.
; называется частотной передаточной функцией.
Ее можно представить в виде
 6.19.
6.19.
где  ;
;  ; 6.20.
; 6.20.
A(w)- амплитудно-частотная характеристика;
j(w)- фазочастотная характеристика.
Рисунок 6‑4
На комплексной плоскости частотная передаточная функция определяет вектор 0C (длина) модуль - АЧХ, j(w)- фазочастотная характеристика. (рис 6.3)
Дата добавления: 2016-11-28; просмотров: 984;