ОСНОВЫ ТЕОРИИ РАБОЧИХ ПРОЦЕССОВ В ЦИЛИНДРЕ ДИЗЕЛЯ § 1.1. Идеальный цикл дизеля 14 страница
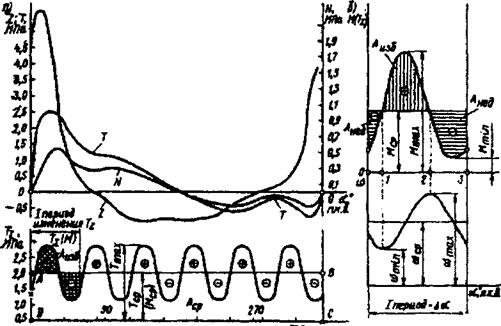
Рис. 7.4. Развернутая диаграмма СИЛ Р3, PjV\P
Суммарная сила Р представляет собой алгебраическую сумму сил действия газов РГ и инерции поступательно движущихся масс Pj. Кривая этой силы, характеризующая ее изменение в течение цикла, может быть получена путем суммирования ординат кривых Рг и Pj с учетом их знака, построенных для двухтактного двигателя на базе 360° п. к. в. (см. рис. 7.4) и для четырехтактного на базе 720° п. к.в.1
Суммарная с и л а Р, как и ее составляющие, приложена к центру головного соединения и действует вдоль оси ци-
5 Здесь и далее силы Р, R,N,T,Z приняты условно, так как фактически они приведены к единице площади поршня и имеют размерность Н/м2.
линдра. Она может быть разложена на две составляющие (рис. 7.2): силу, действующую по оси шатуна, Рш ~ P/cos/З, и силу, перпендикулярную оси цилиндра, N = Р / tg/3.
Если принять tg/i = sinp ввиду малости угла и, поскольку sin ft = X sina (из рассмотрения треугольников САВ и ОБА), то
N = PXsina . (7.7)
Сила N (нормальная сила) прижимает трон- ковую часть поршня к стенке цилиндра (в тронковом двигателе) или ползун крейцкопфа к его направляющей (в крейцкопфном двигателе). Сила переменна по направлению, этим объясняется происходящая при работе двигателя перекладка поршня и ползуна крейцкопфа с борта на борт.
Сила Рш t действующая по оси шатуна, сжимает его стержень. Перенесем силу Рш по линии ее действия в центр кривошипной шейки (точка А) и разложим ее на две составляющие: Тангенциальную силу, касательную к окружности, описанной радиусом R,
 T-P„Sm(a+/l>=PSHa + /3>
T-P„Sm(a+/l>=PSHa + /3>
COS Р
и радиальную силу, направленную по радиусу кривошипа, Z = Рц/cos (а + Р) = Р Cos Д (7.9)
 « * т то т до т
Рис. 7.5. Кривые сил: нормальной N, радиальной Z и тангенциальных Т и Tz для 2-х тактного двигателя
« * т то т до т
Рис. 7.5. Кривые сил: нормальной N, радиальной Z и тангенциальных Т и Tz для 2-х тактного двигателя
|
На основании выражений (7.7)-(7.9) можно построить кривые N, Z и Т в функции угла поворота кривошипа (рис. 7.5). Нормальная, радиальная и тангенциальная силы непостоянны и в пределах каждого рабочего цикла принимают как положительные, так и отрицательные значения. Отсюда переменны и вызываемые ими нагрузки в элементах конструкции двигателей.
Крутящий и опрокидывающий моменты
Перенесем радиальную силу Z (см. рис. 7.2) по направлению ее действия в центр коленчатого вала О и приложим одновременно к центру вала две взаимно противоположные и равные силы Т и Г" параллельные и равные в свою очередь тангенциальной силе Т. Силы Т и Т образуют пару сил (с плечом R), момент которой, называемый крутящим моментом, приводит во вращение коленчатый вал:
Мц= TFnR =Р S1-a +/-- FnR , (7.10)
cos (5
где Fn - площадь поршня (в формулу включена в связи с тем, что сила Р относится к 1 см2 площади поршня).
Поскольку тангенциальная сила непостоянна, то изменяется и вызываемый ею крутящий момент. Кривую Т (см. рис.7.5) на основании выражения (7.10) можно рассматривать и как кривую Мц одного цилиндра, только масштаб оси ординат будет иным. Сложение сил Z" и Т" (см. рис. 12) дает равнодействующую силу Р"ш, нагружающую рамовые подшипники коленчатого вала.
Pin” ~ Рш ~ Рш — Р / COS0
Разложим силу Р"ш на две составляющие - горизонтальную N"и вертикальную Р”:
Р" = Р"ШС05р = (Р / cosp) . cos/i - Р N" = P"insinfi = (jP /cosp) . sin/i ~P tg/3 = N, напомним, что sin/i « tgp
Равные по значению силы N и N" передаются остову двигателя и образуют пару сил с плечом Н. Эта пара сил стремится повернуть двигатель вокруг продольной оси в сторону, противоположную вращению коленчатого вала. Создаваемый ими момент называется опрокидывающим моментом, (Нм)
Мопр= -NFnH, (7.11) который численно равен крутящему моменту Мц, но направлен в противоположную сторону: Мопр = - Мц, (см. рис.7.2).
Опрокидывающий момент, будучи приложенным к остову двигателя, передается опорам фундамента, вызывая в них реакции Rj и R2, которые могут быть определены из равенства внешнего реактивного момента:
MR = Rj,2 1ф = Мопр, откуда Rj2 = Мопр/ 1Ф, (7.12)
где 1ф - расстояние между опорами, м.
Таким образом, фундамент двигателя испытывает действие периодически меняющейся силы инерции поступательно движущихся масс, воспринимает переменный опрокидывающий момент и нагружается весом двигателя.
До сих пор рассматривались силы и моменты, возникающие в пределах одного цилиндра. В многоцилиндровом двигателе коленчатый вал воспринимает и передает суммарный крутящий момент всех цилиндров, мгновенные значения которого
М = TzFnR, (7.13) где Tz - мгновенное суммарное касательное усилие (см. рис.7.5*), условно приложенное к фланцу коленчатого вала на радиусе R
Для нахождения усилия Tz необходимо суммировать через 10-15° значения сил Г всех цилиндров. На основе полученных данных строят кривую Tz=f (а).
Для многоцилиндрового двигателя эта кривая представляет собой периодическую функцию с периодом, равным углу заклинивания кривошипов вала. Планиметрирование площади под ней на протяжении одного периода позволяет установить среднюю тангенциальную силу, равную отношению площади к длине одного периода и определяющую средний крутящий момент двигателя, Нм,
Мср = TcpFnR (7.14)
N.
ишМср — 9550—L, (7.15)
п
где Ni - мощность двигателя, кВт; п - частота его вращения, 1/мин.
§ 7.2. Неравномерность вращения вала
Крутящий момент двигателя, как и составляющие моменты отдельных цилиндров, непостоянен и представляет собой периодическую функцию с периодом изменения, равным углу заклинивания кривошипов А а (см. рис.7.5, а, б). Наряду с этим момент, поглощаемый гребным винтом или генератором Мп,эи , практически постоянен и на установившемся режиме должен быть равен среднему крутящему моменту двигателя
Мп.эн = МСр. На диаграмме 7^(а) (см. рис.7.5, а) средняя величина момента МСр представлена в виде прямой, проведенной параллельно оси абсцисс на расстоянии от нее, равном Тср.
Площадь прямоугольника ABCD, построенного на базе 0-360° п. к. в. с ординатой Тср, будет представлять собой среднюю работу Аср крутящего момента. Если рассматривать изменение момента двигателя М (Т£) относительно поглощаемого момента Мср (Тср), то (см. рис.7.5, а, б) в отдельные периоды развиваемый двигателем момент превышает момент, потребляемый гребным винтом или иным потребителем энергии (М > Мср), или Tz> Тср> а в другие периоды момент двигателя меньше поглощаемого момента.
В соответствии с этим и работа крутящего момента двигателя то больше его среднего значения, то меньше. Так, на участке 0-1 (см. рис. 7.5, б) работа отрицательная (Анед). Недостаток работы восполняется путем использования части кинетической энергии вращающихся масс двигателя и гребного винта. При этом угловая скорость вала со падает. На следующем участке 1-2 работа положительная; избыточная работа АШб расходуется на увеличение кинетической энергии вращающихся масс, и угловая скорость повышается. На участке 2-3 снова недостаток энергии, и угловая скорость снижается.
Колебание частоты вращения вала типично для поршневых двигателей и, как это видно из сделанного анализа, заключается в непостоянстве крутящего момента. При этом, чем больше изменения момента, тем больших изменений частоты вращения вала следует ожидать.
Для оценки неравномерности вращения вала вводится понятие степени неравномерности, под которой понимается от
ношение максимального приращения угловой скорости коленчатого вала к его средней угловой скорости при установившемся режиме:
 (7.16)
(7.16)
где сотС1Х и comin - максимальное и минимальное значения угловой скорости, а соср = я п / 30 - средняя угловая скорость.
Из определения степени неравномерности следует, что равномерность вращения вала тем больше, чем меньше 8. Рекомендуемые значения 8 лежат в пределах для двигателей:
главных, приводящих в движение гребной винт, 8 - 1/20-1/40; вспомогательных, приводящих в движение генераторы: постоянного тока 8 = 1/100 - 150, переменного тока 8 = 1/150- 1/300.
Вал двигателя, имеющего большее число цилиндров, вращается равномернее. Неравномерность вращения вала увеличивается при выключении из работы одного или нескольких цилиндров, при увеличении неравномерности распределения мощности между цилиндрами и отклонений в значениях максимального давления цикла в цилиндрах. Для сохранения требуемой равномерности вращения вала необходимо, чтобы отклонения Р{ и Pz в отдельных цилиндрах были минимальны и не превышали соответственно ±2,5 и ±5 % от их среднего значения для всех цилиндров.
С увеличением махового момента вращающихся масс (а это равносильно увеличению запаса кинетической энергии) степень неравномерности 8 уменьшается. Поэтому для обеспечения более равномерного вращения вала маховой момент необходимо увеличить; обычно для этого увеличивают маховой момент маховика G м D2, где GM масса маховика, D его диаметр.
В судовых малооборотных двигателях в связи с большими вращающимися массами достаточно низкая степень неравномерности вращения обеспечивается самими вращающимися массами, поэтому необходимость в маховике отпадает, а имеющийся маховик в основном выполняет функцию колеса вало- поворотного механизма. При анализе причин, вызывающих неравномерное вращение вала, колебания угловой скорости,
вызываемые неравномерностью регулятора частоты вращения и волнением моря, не учитывались, так как эти колебания по частоте несоизмеримы с рассмотренными, их период во много раз превышает время одного оборота вала.
§ 7.3. Внешняя неуравновешенность и методы уравновешивания двигателей
Причины неуравновешенности. Понятие неуравновешенности поршневых двигателей связывается с действием в них циклически меняющихся сил и их моментов, вызывающих вибрацию, как самого двигателя, так и его фундамента и корпуса судна. К числу циклически меняющихся сил двигателя относятся силы действия газов в цилиндрах Рг и силы инерции движущихся масс Pj. Силы Рг9 будучи направленными вверх и вниз, в пределах каждого цилиндра взаимно уравновешиваются (рис. 7.6, а), за пределы остова двигателя не передаются и поэтому не могут служить причиной его неуравновешенности.
Единственными силами, которые вызывают неуравновешенность и обусловленные ею вибрации, являются силы инерции и создаваемые ими моменты.
Силы инерции. Подразделяют эти силы на силы инерции поступательно движущихся масс, к которым относится поршень, шток и часть шатуна, и центробежные силы, создаваемые вращающимися массами. Силы инерции в одноцилиндровом двигателе являются свободными и могут быть причиной вибрации.
Сила инерции поступательно движущихся масс описывается формулой (7.6). Ввиду сложности закона ее изменения она может быть условно разделена на две составляющие:
Pj = Pji + PjjjTjxg:
Pj j = mnR со2 cos a = Pjcos a, (7.17) подчиняющаяся закону косинуса угла поворота кривошипа, называется силой инерции первого порядка;
Pj и ~ mnRco k cos2a = PuCOs2a, (7.18)
подчиняющаяся закону косинуса удвоенного угла поворота кривошипа 2а, называется силой инерции второго порядка.
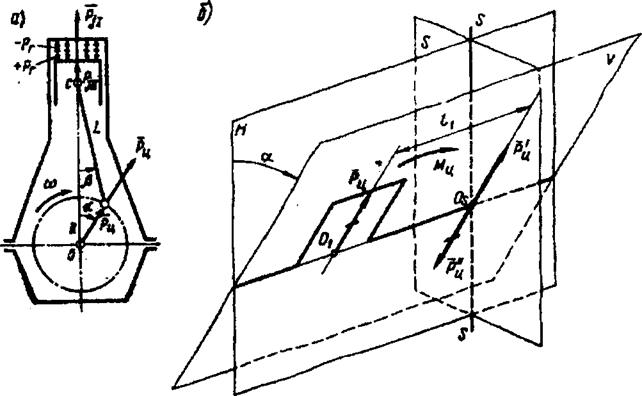 Рис. 7.6. Силы инерции и моменты центробежных сил
Рис. 7.6. Силы инерции и моменты центробежных сил
|
 Рис. 7.7. Характер изменения сил инерции первого и второго порядков
Рис. 7.7. Характер изменения сил инерции первого и второго порядков
Силы Рл и Pju действуют в направлении движения поступательно движущихся масс - вдоль оси цилиндра, причем сила Pju в 2-5 раз меньше силы Рл, так как входящее в ее выражение X = 1/2,2 - 1/5. Обе силы приложены к центру головного соединения (точка С на рис. 7.6, а) и при вращении кривошипа непрерывно меняют свои значения и знак, но при всех углах поворота кривошипа остаются в плоскости оси цилиндра (рис. 7.7).
Внешнее воздействие сил инерции I и II порядков - они стремятся оторвать двигатель от фундамента, когда направлены вверх, и прижать к фундаменту, когда направлены вниз. Частота действия сил и вызываемых ими колебаний будет кратна соответственно (сои 2 со, где со - угловая скорость).
Центробежная сила инерции, создающаяся при вращении
 коленчатого вала, Рц = mBpRco .
коленчатого вала, Рц = mBpRco .
Эта сила постоянна по значению и направлена по радиусу кривошипа от центра кривошипного соединения к периферии. Масса вращающихся частей, как и поступательно движущихся, отнесенная к площади поршня, кг/м2,
Мщ SP + Мм + Мщ
Мвр =-----------------------------
Fn
где Мщвр— масса вращающейся части шатуна, кг;
Мм = GM /g ~ масса кривошипной шейки, кг; Мш - неуравновешенная масса двух щек, ориентировочно равная половине их массы, кг.
Центробежная сила инерции приложена к центру кривошипного соединения (см. рис.7.6, а). Перенесем ее по линии действия в центр О коленчатого вала и в масштабе чертежа представим в виде радиуса-вектора Рц. При вращении вала вектор
Рц, лежащий в плоскости кривошипа, будет также вращаться, каждый раз занимая новое положение, соответствующее углу а, отсчитываемому от ВМТ. Иначе говоря, центробежная сила вращается вместе с валом, непрерывно меняя направление своего действия.
Внешнее воздействие центробежной силы инерции - в зависимости от положения кривошипа она стремится сместить двигатель с фундамента в плоскостях, совпадающих в каждый момент с плоскостью кривошипа и проходящих через ось коленчатого вала.
Моменты сил инерции. Природу возникновения и действия моментов сил инерции разберем на примере центробежной силы одноцилиндрового двигателя, пространственная схема коленчатого вала которого приведена на рис. 7.6, б.
Допустим, что в рассматриваемый момент времени кривошип отклонился от ВМТ на угол а и находится в плоскости V. Тогда возникающая в нем центробежная сила инерции Рц также лежит в этой плоскости и, будучи приложенной в точке Оj находится на расстоянии // от плоскости S, проходящей через центр тяжести двигателя.
Известно, что всякую силу Р, не нарушая ее действия, можно перенести параллельно самой себе в любую точку О, присоединив при этом пару с моментом, равным моменту силы Р относительно точки О]. Воспользовавшись этим правилом, приведем силу Ри к центру 05 (Рис 7.6-6), являющемуся точкой пересечения оси вала с плоскостью центра тяжести S.
После приведения имеем: силу Рц, приложенную к центру О и стремящуюся оторвать двигатель от фундамента в плоскости V; пару сил Рц и Р"ц, создающую на плече 11 момент Мц, действующий в той же плоскости V и стремящийся опрокинуть двигатель относительно его центра тяжести в направлении по часовой стрелке.
Полученный момент Мц = Pj j lj = т uRco~ (7.20) называется моментом центробежной силы; значение и направление его определяются как самой силой, так и положением плоскости центра тяжести двигателя относительно оси цилиндра.
Момент центробежной силы Мц как и сама сила Рц при вращении вала остаются неизменными и каждый раз, действуя в плоскости колена, вращаются вместе с ним с угловой скоростью со.
Аналогично могут быть получены моменты сил инерции первого порядка Mj = Pjih = mnRco2cosa lj (7.21)
и второго порядка Мц = Pj uh~ mnRco2 Я cos 2 а //. (7.22) Поскольку силы Pji и Pjn действуют в вертикальной плоскости (плоскости движения поршня), то и вызываемые ими моменты М\ и Мц действуют лишь в этой плоскости вне зависимости от положения кривошипа.
Внешнее воздействие м о м е н т о в: центробежных сил - опрокинуть двигатель относительно его центра тяжести в плоскостях, проходящих через плоскость кривошипа и вращающихся вместе с ним;
сил инерции I и II порядков - опрокинуть двигатель относительно его центра тяжести в вертикальной плоскости, проходящей через оси цилиндров.
Внешняя и внутренняя неуравновешенность многоцилиндрового дизеля. В пределах одного цилиндра возникают и действуют: центробежная сила инерции вращающихся масс Рц, сила инерции поступательно движущихся масс первого порядка Pju сила инерции поступательно движущихся масс второго порядка Рщ, момент центробежной силы МЦ9 моменты сил первого и второго порядков Mj и Мц.
|
1. 
 Момент первого породка в верт.пл.
Момент первого породка в верт.пл.
2. Момент второго породка в верт.пл.
1. момент перв. порядка в гориз.пл.
Момент, прилож. к параллелям, от норм, силы, вертикальный
Момент, прилож. к параллелям, от ^ норм, силы, горизонтальный
А-давление сгорания В-нормальная сила С- сила затяга анкерных связей
D- сила на рамовые подшипники
Рис. 7.8. Силы и моменты, действующие в 2-х тактном двигателе
Силы и моменты в многоцилиндровом двигателе возникают и действуют в каждом цилиндре, и их суммарный эффект для двигателя в целом может быть получен путем нахождения следующих векторных сумм:
2 2 Р}\\ 2 Р}ц\ 2 Мц;
1 1
Если результаты суммирования оказываются равными нулю, то это свидетельствует о полной внешней уравновешенности двигателя.
Внешняя неуравновешенность двигателей
 Результирующие силы инерции и моменты сил инерции
Результирующие силы инерции и моменты сил инерции
|  |
|
|
 |  |

Нулевые значения векторных сумм могут быть получены, если одноименные силы, действующие во всех цилиндрах, и моменты сил, замыкаясь внутри остова двигателя, компенсируют друг друга. Это означает, что внешнее воздействие результирующих векторов сил и моментов в данном случае отсутствует, т. е. на фундамент и корпус судна они не передаются.
Если же векторы сил или моментов при сложении компенсируются лишь частично или совсем не компенсируются, то результирующие их векторы (суммы) будут выходить за пределы остова двигателя и оказывать внешнее воздействие в виде переменной периодически меняющейся нагрузки на фундамент и конструкции корпуса судна. В этом случае двигатель считается внешне неуравновешенным. Поскольку геометрическая сумма векторов зависит от их количества, размеров и взаимного расположения, то внешняя неуравновешенность многоцилиндрового двигателя в общем случае определяется числом цилиндров и взаимным расположением кривошипов (углом заклинивания и порядком работы цилиндров). О характере внешней неуравновешенности двигателей с наиболее типичным расположением кривошипов можно судить по данным табл. 7.1.
Помимо внешнего воздействия сил инерции и их моментов, последние, действуя внутри остова двигателя, нагружают и деформируют его конструкции. Центробежные силы, действуя в плоскости колена вала, а силы инерции I и II порядков - в плоскости осей цилиндров, нагружают коленчатый вал и подшипники и передаются фундаментной раме. Одновременно вал нагружается моментами Мц, Mi и Мц, которые стремятся изогнуть вал в плоскостях их действия; деформация вала воспринимается подшипниками (особенно центральными, испытывающими наибольшую нагрузку) и фундаментной рамой, в которой они расположены. В итоге в фундаментной раме, как и на валу, под действием моментов сил инерции возникают напряжения изгиба и деформации. Отмеченное действие сил инерции внутри остова двигателя определяет внутреннюю неуравновешенность двигателя.
Заметим, что независимо от степени и характера внешней неуравновешенности двигателя внутренне он всегда остается неуравновешенным.
Из формул (7.17)-(7Л9) видно, что чем больше частота вращения вала и больше масса движущихся частей, тем больше силы инерции и больше сказывается их воздействие на остов самого двигателя (внутренняя неуравновешенность) и его фундамент (внешняя неуравновешенность).
Методы уравновешивания. Внешняя неуравновешенность двигателя, особенно если неуравновешенные силы и моменты значительны, может вызывать последствия, связанные с вибрацией как самого двигателя, так и соединенных с ним конструкций корпуса судна. Поэтому в отдельных случаях для уменьшения вибрации прибегают к уравновешиванию возникающих в двигателе сил и моментов.
Уравновешивание центробежных сил осуществляется путем установки на щеках кривошипов противовесов (рис.7.9). При вращении в кривошипе одного цилиндра возникает центробежная сила Рц, лежащая в плоскости кривошипа, Рц = mBpRco2, где тВр - масса неуравновешенной части кривошипа (кривошипная шейка и часть массы щек) и ориентировочно равна 0,6 массы шатуна, участвующей во вращательном движении, кг; R - радиус кривошипа, м.
Сила Рц может быть уравновешена двумя противовесами, укрепленными на щеках кривошипа. Они развивают центро

|
 бежную силу 2Рпр ~ Рц. Тогда можно записать тВр = 2mnpRco - 2 тпррсо2 или при равенстве угловых скоростей масс двигателя и противовесов тВР Rco2 = 2тПРр, где тпр - масса одного противовеса, кг; р - радиус инерции противовеса, равный расстоянию от его центра тяжести до оси вращения, м.
бежную силу 2Рпр ~ Рц. Тогда можно записать тВр = 2mnpRco - 2 тпррсо2 или при равенстве угловых скоростей масс двигателя и противовесов тВР Rco2 = 2тПРр, где тпр - масса одного противовеса, кг; р - радиус инерции противовеса, равный расстоянию от его центра тяжести до оси вращения, м.
При наличии в системе неуравновешенного момента имеются две возможности его погасить: первая приводит к уравновешиванию центробежных сил
в пределах каждого цилиндра, вторая - к уравновешиванию свободного момента системы парой противовесов, развивающих равный, но противоположный по знаку момент. Расстояние между этими противовесами желательно выбирать максимально большим, с тем, чтобы по возможности уменьшить их массу.
Иногда прибегают к установке противовеса для разгрузки рамовых подшипников. В этом случае противовесы часто навешивают на щеки под углом к их оси. Уравновешивание сил инерции I и II порядков, возникающих от поступательно движущихся масс цилиндра, невозможно осуществить с помощью противовесов, установленных на щеки вала, так как центробежная сила противовесов, находясь в плоскости колена, при вращении вала непрерывно меняет плоскость своего действия. Необходимо же иметь уравновешивающую силу только в вертикальной плоскости. Задача может быть решена, если использовать две массы, вращающиеся в разные стороны (рис. 7.10). Эти массы заклинены на дополнительных валах таким образом, что создаваемые при их вращении вертикальные составляющие Рцв центробежных сил складываются и дают составляющую 2Рцв = Pj и но противоположно направленную, которая и уравновешивает силу Pjj первого порядка. Горизонтальные составляющие Рцг взаимно уничтожают друг друга. Таким образом можно уравновесить и силу инерции 2-го порядка, но для этого необходимо, чтобы противовесы вращались в противоположные стороны с удвоенной угловой скоростью 2со.
 Изложенный метод известен под наименованием «Ланче- стер Балансир».
Изложенный метод известен под наименованием «Ланче- стер Балансир».
Уравновешивая силы, можно подобным образом уравновесить и создаваемые ими моменты М/ и Мц. Как видно из таблицы 7.1, двухтактные двигатели имеют неуравновешенные моменты от сил первого и второго порядков, значения которых согласно формулам 7.21 и 7.22 пропорциональны радиусу кривошипа R и отношению L = Я . В современных длинноходовых двигателях величины R и L возросли примерно в 1,8 раза, что не
могло не отразиться на росте сил инерции и вызываемых ими моментов. Этим объясняется, что в крейцкопфных двигателях более ранних конструкций метод «Ланчестер Балансир» не находил применения, а использовался исключительно в высоко-
 и среднеоборотных двигателях, для которых характерно наличие больших сил инерции в силу высоких оборотов, то с появлением длинноходовых конструкций его стали применять и в них. Иллюстрацией служит рис. 7.11.
и среднеоборотных двигателях, для которых характерно наличие больших сил инерции в силу высоких оборотов, то с появлением длинноходовых конструкций его стали применять и в них. Иллюстрацией служит рис. 7.11.
Рис. 7.11. Уравновешивания моментов в крейцкопфном двигателе
§ 7. 4. Продольные и крутильные колебания вала
Продольные колебания
Этот вид колебаний возникает под действием тангенциальной Т и радиальной Z составляющих сил действия газов и сил инерции масс, нагружающих кривошипы коленчатого вала и вызывающих деформацию колен в виде попеременного расхождения или сближения щек (рис. 7.12). В итоге вал приобретает колебания вдоль оси, которые передаются упорному подшипнику, а через него фундаменту и корпусу судна. Продольные колебания стали особенно заметными с ростом форсирования двигателей, так как увеличилось отношение pz/ре с 7,5 до 10. Продольные колебания возбуждаются также меняющимся упором гребного винта из-за пульсирующего характера действия воды на вращающиеся лопасти и крутильных колебаний валопровода и винта. В целях уменьшения продольных колебаний коленчатого вала и вызываемых ими вибраций судна на носовой фланец вала устанавливают
гидравлический демпфер поршневого типа (см. рис. 7.17).
 Рис. 7.12. Схема деформациии кривошипа при продольных колебаниях
Рис. 7.12. Схема деформациии кривошипа при продольных колебаниях
Колебания в поперечной плоскости
 Малооборотаый крейцкопфный двигатель, имеющий большую высоту, раскачивается в поперечной плоскости под действием моментов, возникающих в пределах каждого цилиндра от нормальных сил N, передаваемых через крейцкопфный узел параллелям. Частота этих колебаний невелика и равна произведению п i (где / - число цилиндров). Для самого двигателя эти колебания неопасны, но они могут вызвать нежелательные высокие местные напряжения в наборе второго дна корпуса судна под фундаментом двигателя.
Малооборотаый крейцкопфный двигатель, имеющий большую высоту, раскачивается в поперечной плоскости под действием моментов, возникающих в пределах каждого цилиндра от нормальных сил N, передаваемых через крейцкопфный узел параллелям. Частота этих колебаний невелика и равна произведению п i (где / - число цилиндров). Для самого двигателя эти колебания неопасны, но они могут вызвать нежелательные высокие местные напряжения в наборе второго дна корпуса судна под фундаментом двигателя.
Чтобы этого избежать, остов двигателя в его верхней части раскрепляется с набором корпуса судна в зоне главной палубы с помощью двух пар поперечных связей / (рис. 7.13), снабженных эластичным гидравлическим звеном 2. Наличие этого звена позволяет сохранять постоянной силу натяжения связей вне зависимости от возможных при изменении загрузки судна (плавание в балласте или в грузу) деформаций его корпуса.
Крутильные колебания
В дизельной установке крутильные колебания испытывают коленчатый вал, промежуточные и гребной валы с навешенными на них массами (детали механизма движения отдельных цилинд-
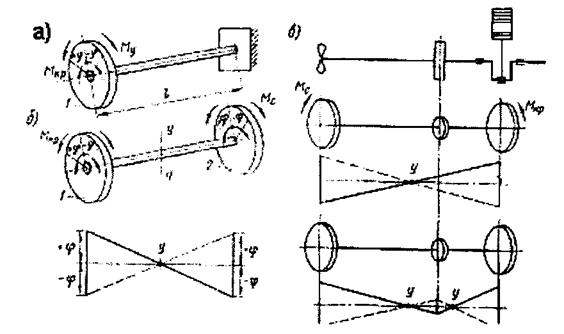 Рис. 7.14. Одно-, двух- и трехмассовые крутильные системы
Рис. 7.14. Одно-, двух- и трехмассовые крутильные системы
|
ров, маховик, соединительные муфты, гребной винт), связанные в единую упругую систему валопровода.
Крутильные колебания представляют собой периодические колебания в плоскости вращения навешенных на вал масс, при которых участки вала между массами скручиваются и раскручиваются под действием циклически меняющегося крутящего момента.
Любая конструкция под действием переменных сил испытывает два вида колебаний - свободные и вынужденные.
Дата добавления: 2016-05-16; просмотров: 1101;