ОСНОВЫ ТЕОРИИ РАБОЧИХ ПРОЦЕССОВ В ЦИЛИНДРЕ ДИЗЕЛЯ § 1.1. Идеальный цикл дизеля 15 страница
Свободные колебания. Эти колебания рассмотрим на примере простейшей крутильной системы, состоящей из вала длиной Z, жестко закрепленного одним концом, и массы в виде диска 1, центр тяжести которого лежит на оси вала (рис.7.14,я). Если к массе приложить момент Мкр, то вал окажется скрученным (в пределах упругих деформаций) на угол +<р. В скрученном валу возникнет момент от сил упругости материала вала Му Допустим теперь, что действие момента МКр мгновенно прекратится. Под действием момента Му система будет возвращаться в исходное положение, однако вследствие инерции массы / она не остановится в положении равновесия и вал вновь окажется скрученным, но уже в обратном направлении (на угол -<р). Упругость вала снова вызовет поворот массы, и она по инерции перейдет через положение равновесия, т. е. процесс повторится.
Таким образом, после прекращения действия внешнего момента система будет совершать свободные колебания только за счет сил упругости материала вала и силы инерции массы. При этом вал будет скручиваться то в одном, то в другом направлениях. Принципиально ничего не изменится, если жесткое закрепление свободного конца вала заменить значительным сопротивлением колебаниям (например, насадить на вал гребной винт или маховик генератора) и, если во время совершения колебаний вал одновременно будет равномерно вращаться. При отсутствии сопротивлений свободные колебания могли бы продолжаться бесконечно долго с неизменными амплитудой и частотой.
Амплитуда колебаний (угол скручивания вала)

|
где Мкр - крутящий момент, 1 - длина вала,
G - модуль упругости материала вала,
//>- полярный момент инерции сечения вала,
С - крутильная жесткость вала, е — податливость вала.
Частота колебаний (число циклов колебаний в секунду)
|
(7.24),
где 8 - момент инерции массы относительно оси вала.
Рассмотренная простейшая крутильная система является одномассовой. Закрепив на свободном конце вала еще одну массу в виде диска (рис. 7.14,6), получим двухмассовую крутильную систему.
Если к массам 1 и 2 приложить моменты Мкр и Мс противоположных знаков, а затем мгновенно их снять, то при упругом колебании такой системы некоторое сечение вала (УУ) будет оставаться в покое, т. е. угловая амплитуда (угол скручивания (р) будет равна нулю. Это сечение вала называется узлом колебаний. Если отложить на диаграмме (см. рис.7.14) в соответствующем масштабе максимальные значения угловых
амплитуд масс и соединить полученные точки прямой, то получим график угловых амплитудных отклонений масс от положения равновесия, иллюстрирующий форму колебаний. У двухмассовой системы форма колебаний имеет только один узел (точка У) и называется одноузловой.
В общем случае умногомассовой системы с / массами максимально возможное число форм колебаний равно i-L Действительная крутильная схема системы валопровода является сложной многомассовой системой, но при определении частоты свободных колебаний ее обычно упрощают и приводят к трехмассовой системе: двигатель-маховик-гребной винт (рис. 7.14, б). Такая система может иметь как одноузловую, так и двухузловую формы колебаний.
Каждая форма имеет свою частоту свободных колебаний, причем, чем выше форма колебаний (т. е. чем больше узлов), тем больше частота колебаний.
Вынужденные колебания. Эти колебания в системе валопровода возникают под действием периодически изменяющихся крутящих моментов от сил давления газов в цилиндрах и сил инерции поступательно движущихся масс. Указанные моменты называются возмущающими и, как известно, для одного цилиндра определяются выражениями:
Mr = TR = Р *"-£ +1>_. R „ м, = Г; R = Р, — R.
Моменты МГ и Mj являются сложными периодическими функциями и в целях упрощения анализа могут быть разложены на элементарные составляющие - гармоники, изменяющиеся по закону синуса с различными амплитудами и частотами. Например, крутящий момент от сил давления газов можно представить в виде ряда
Мг = Мер + Mj + М2 + Ms + ... + Mk + ..., (7.25) где Мер - средний крутящий момент одного цилиндра за цикл; М\, М2, Мз...,Мк-текущие значения гармонических составляющих.
Подобным образом можно разложить в ряд крутящий момент от сил инерции поступательно движущихся масс. Такое разложение называется гармоническим анализом крутящего момента двигателя.
Каждая гармоника имеет свой порядок, который показывает число полных изменений гармоники за один оборот вала. Так как в четырехтактном двигателе рабочий цикл осуществляется за два оборота вала, а в двухтактном - за один, то 1, 2, 3 и к-и. члены выражения (7.25) будут являться гармониками в двигателях: двухтактных - 1, 2, 3, к-го порядка; четырехтактных - 1/2, 1, 1 1/2, к/2-го порядка.
Каждая гармоника возбуждает в валу вынужденные колебания определенной частоты, пропорциональной порядку гармоники к и частоте вращения вала пу т. е. v в = К п кол/мин.
Наибольшие амплитуды колебаний вызывают гармоники, порядок которых равен или кратен числу вспышек в цилиндрах за один оборот вала двигателя (главные гармоники). Наименьший порядок главной гармоники к = / / т, где i - число цилиндров; т - коэффициент тактности двигателя. Остальные порядки главных гармоник будут кратны ему. Например, для шестицилиндрового четырехтактного двигателя к = 6/2 = 3 (кратные порядки: 6, 9, 12 и т. д.), для двухтактного двигателя к = 6/\ = 6 (кратные порядки: 12, 18, 24 и т. д.).
Таким, образом, вынужденные крутильные колебания под действием крутящего момента можно рассматривать как сумму гармонических колебаний под действием отдельных составляющих этого момента.
Средний крутящий момент Мср (постоянная составляющая полного момента) не вызывает крутильных колебаний и приводит валовую систему во вращение, создавая постоянное напряжение скручивания Тср на участке вало- провода между двигателем и гребным винтом.
Гармонические составляющие полного момента являются возмущающими моментами, вызывающими крутильные колебания, дополнительные знакопеременные напряжения 0дол„ которые накладываются на постоянное напряжение от Мер, снижая прочность коленчатого вала и валопровода.
Резонанс, критическая частота вращения и запретные зоны
Совпадение частоты какой-либо формы свободных колебаний с частотой какой-либо гармонической составляющей
возмущающего момента называется резонансом, а частота вращения, при которой наступает резонанс, называется критической (или резонансной) частотой.
Из равенства частот vc = vB = кп кол 7с вытекает, что критическая частота вращения
пКр=^~, с1 (7.26)
к
При резонансе амплитуда крутильных колебаний (угол скручивания вала) и пропорциональные ей дополнительные напряжения кручения увеличиваются и могут оказаться опасными для прочности вала и вызвать его поломку (рис. 7.15, а, б). Опасные режимы работы можно определить с помощью графика (см. рис.7.15, б).
На рис. 7.15, а резонансные частоты появляются при пересечении линий собственных колебаний вала двигателя vc/ и vc2 с двумя гармоническими составляющими вынужденных колебаний VBI И VB2*
 На этот же график наносится линия допускаемого напряжения от крутильных колебаний адоп> установленного из соображений усталостной прочности материала вала. Если линия допускаемого напряжения не пересекает резонансных кривых, резонансные напряжения особой опасности не представляют и
На этот же график наносится линия допускаемого напряжения от крутильных колебаний адоп> установленного из соображений усталостной прочности материала вала. Если линия допускаемого напряжения не пересекает резонансных кривых, резонансные напряжения особой опасности не представляют и
режимы пкр2 и пкр3 допустимы для длительной работы. Режим пкр] опасен для длительной работы, так как прямая допускаемого напряжения отсекает на резонансной кривой участок чрезмерно больших напряжений.
Диапазон частот вращения вблизи nKPi (n1-п2), называемый критическим, опасен для длительной работы.
Он является запретной зоной. На циферблатах тахометров запретные зоны частот вращения отмечают красными секторами. Длительная работа в пределах этой зоны недопустима, и переходить ее надо быстро.
Критическую частоту вращения можно установить не только расчетным путем, но и при помощи специального прибора - торсиографа, позволяющего снимать с работающего двигателя графики крутильных колебаний (торсиограммы).
Внешние признаки работы двигателя в зоне критических частот вращения:
• сильная вибрация и резкие стуки в двигателе вследствие периодического изменения угловой скорости отдельных кривошипов,
• нагрев отдельных участков водопровода (иногда до появления цветов побежалости) вследствие внутреннего трения частиц металла при упругих деформациях кручения.
Если запретная зона частот вращения оказывается в области рабочих режимов двигателя, принимают меры для смещения пкр за пределы этой области. Для этого еще в процессе проектирования установки изменяют частоту свободных колебаний системы путем изменения момента инерции GIp сечения коленчатого вала или валопровода (изменением диаметра вала), либо моментов инерции в I маховых масс (изменением массы маховика, гребного вала или установкой динамических гасителей колебаний - антивибраторов), здесь / - расстояние между массами, м.
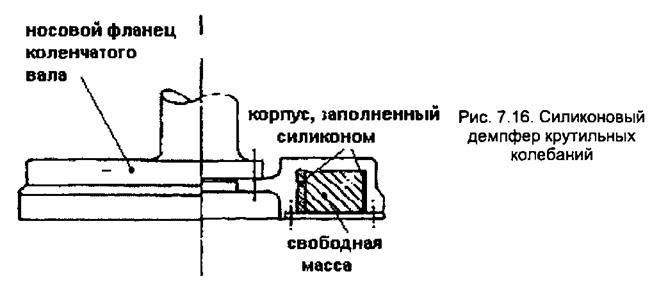
Иногда прибегают к уменьшению амплитуды резонансных колебаний изменением порядка вспышек в цилиндрах (что не всегда возможно); разделением крутильной системы путем установки между двигателем и валопроводом гидромуфты; установкой специальных гасителей крутильных колебаний - демпферов (см. рис. 7.16/
Общим для всех существующих типов демпферов является наличием между маховой массой и ступицей элемента с трением, поглощающего часть колебательной энергии системы. Сегодня наибольшее распространение находят силиконовые демпферы. Ступица силиконового демпфера (рис. 7.16) жестко крепится к носовому фланцу коленчатого вала, а маховик (свобод
ная масса) размещается внутри корпуса, составляющего одно целое со ступицей. Между поверхностями маховика и корпуса демпфера имеются зазоры в 0,2-0,5 мм, заполняемые силиконовой жидкостью. Энергия крутильных колебаний поглощается трением, возникающим в вязкой среде при относительном движении маховика.
|
 В качестве силиконовой жидкости обычно применяется полиметил сил океан овая жидкость (GVC). Она обладает рядом ценных свойств: химически инертна, малая зависимость вязкости от температуры (в сравнении с обычными моторными маслами), низкая температура застывания, хорошая смазывающая способность.
В качестве силиконовой жидкости обычно применяется полиметил сил океан овая жидкость (GVC). Она обладает рядом ценных свойств: химически инертна, малая зависимость вязкости от температуры (в сравнении с обычными моторными маслами), низкая температура застывания, хорошая смазывающая способность.
На рис. 7.17 представлен демпфер продольных колебаний, поршень которого жестко связан с валом двигателя, а корпус присоединен к остову двигателя. Полости перед поршнем и за ним заполняются маслом, поступающим под давлением из масляной магистрали. Энергия продольных колебаний гасится на перетекание масла из полостей через дросселирующие отверстия.
Рис. 7.17. Демпфер продольных колебаний: 1 - вал; 2 - поршень; 3 - крышка;
4 - отверстия подвода масла;
5 - корпус демпфера.
§ 7.5. Вибрация корпуса судна
При работе двигателя возникает вибрация как его самого, так и корпуса судна, особенно его кормовой оконечности, трубопроводов, механизмов и пр. Вибрация усиливается при достижении определенной частоты вращения вала двигателя, когда наступает явление резонанса. Резонансные зоны меняются при изменении загрузки судна, мест и способов крепления трубопроводов, механизмов, так как это сказывается на частоте их свободных колебаний. Иногда под действием вибрации в конструкциях образуются трещины.
Источником возмущающих сил являются:
• внешне неуравновешенные силы инерции вращающихся и поступательно движущихся масс I и II порядков, под действием которых возникают колебания в горизонтальной и вертикальной плоскостях;
• моменты сил инерции центробежных, I и II порядков, стремящиеся опрокинуть двигатель в вертикальной продольной, поперечной и горизонтальной плоскостях, проходящих через его центр тяжести, и вызывающие изгибные колебания корпуса судна в этих плоскостях;
• опрокидывающий момент двигателя Мопр, действующий в поперечной плоскости и вызывающий колебания в этой плоскости;
• силы, вызывающие продольные колебания вала двигателя и создающие в корпусе судна колебания в диаметральной плоскости;
• крутильные колебания вследствие неравномерности создаваемого двигателем крутящего момента.
Если структура корпуса судна недостаточно прочная и двигатель работает на оборотах, частота которых совпадает с частотой свободных колебаний самого корпуса, то возникающий резонанс может привести к весьма серьезным последствиям. Единственный способ уйти от резонанса - изменить число оборотов двигателя. В последующем следует искать источник возникающих колебаний и постараться его устранить.
Ослабить вибрацию корпуса судна можно путем локализации колебаний двигателя введением упругой связи между ним и фундаментом. В качестве упругой связи используют резиноме
таллические или пружинные амортизаторы, устанавливаемые между двигателем и его фундаментом.
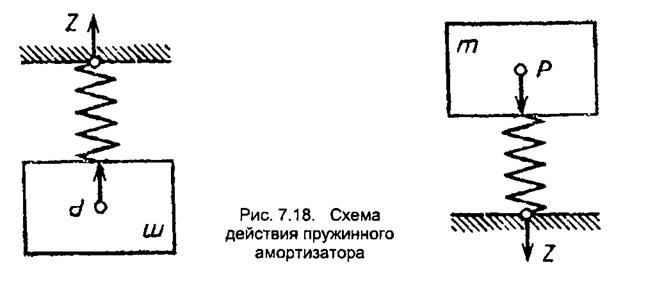
Для того чтобы понять сущность действия амортизатора, рассмотрим упрощенную схему (рис. 7.18), в которой двигатель представлен в виде массивного тела массой т, закрепленного на пружине жесткостью С. Свободные колебания такой системы будут происходить с частотой vc = —^—л/С* / т Гц, (7.27)
2 п
|
Вынужденные колебания тела вызываются возникающей в нем переменной силой Р, частота изменения которой и соответственно частота вынужденных колебаний vB. Сила Р, будучи неуравновешенной , через пружину частично или полностью передается основанию, возбуждая в нем также колебания. Если обозначить передаваемую силу на нижнем конце пружины через Z, то отношение К = 7JP, называемое коэффициентом передачи, может быть представлено
К = (7.28)
l-(vB/vc)2
Из выражения видно, что коэффициент передачи К зависит от соотношения между частотами вынужденных и свободных колебаний тела, но поскольку частота вынужденных колебаний определяется частотой изменения силы и изменить ее нельзя, то для уменьшения коэффициента К остается единственный путь - увеличение отношения vq/vc путем уменьшения частоты свободных колебаний. Последняя, как это следует из формулы (7.28), зависит от жесткости С пружины.
Таким образом, чтобы уменьшить силы, передаваемые двигателем судовому фундаменту; нужно добиться уменьшения коэффициента передачи К путем снижения частоты колебаний vc и соответствующего уменьшения жесткости С амортизатора.
 На амортизаторы можно устанавливать лишь двигатели с жестким остовом, в противном случае не исключена деформация фундаментной рамы, являющейся постелью рамовых подшипников. Установка на амортизаторы требует разобщения вала двигателя с валопроводом с помощью гибкой муфты и наличия гибких соединений подходящих к нему трубопроводов, в том числе и выпускного.
На амортизаторы можно устанавливать лишь двигатели с жестким остовом, в противном случае не исключена деформация фундаментной рамы, являющейся постелью рамовых подшипников. Установка на амортизаторы требует разобщения вала двигателя с валопроводом с помощью гибкой муфты и наличия гибких соединений подходящих к нему трубопроводов, в том числе и выпускного.
Из рисунка видно, что если жесткость пружины принять бесконечно большой и, тем самым, практически исключить гибкую связь между массой и основанием, то коэффициент передачи будет близок к единице и сила Р будет полностью передаваться основанию. С уменьшением жесткости С коэффициент передачи должен уменьшаться. Однако, в связи с тем, что v* / vc приближается к единице, когда колебания входят в
 резонанс, амплитуда колебаний резко возрастает, и это влечет за собой увеличение коэффициента передачи практически до бесконечности.
резонанс, амплитуда колебаний резко возрастает, и это влечет за собой увеличение коэффициента передачи практически до бесконечности.
 Обычно эластичные амортизаторы применяются при установке дизель-генераторов,
Обычно эластичные амортизаторы применяются при установке дизель-генераторов,
имеющих общую раму и не требующих разъединения двигателя и генератора с помощью эластичных муфт (рис. 7.20).
ОСНОВЫ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Глава 8
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ § 8.1. Показатели работы двигателей
Общие сведения. Одна из задач технической эксплуатации состоит в умении технически обоснованно выбрать режим работы двигателя применительно к конкретным условиям плавания и технического состояния судна и двигателя. Решение этой задачи требует знания как характеристик двигателя, так и показателей, на основе которых оценивается его работа на том или ином режиме. Показатели работы двигателей условно могут быть подразделены на показатели энергетические, экономические и эксплуатационные.
К энергетическим и экономическим показателям (см. главу 2) относят:
D эффективную и индикаторную мощности NenNit а крутящий момент Ме>, а средние давления ре и pit а частоту вращения п,
□ удельные расходы топлива ge и glt
К основным эксплуатационным показателям относят давление и температуру, фиксируемые штатными приборами и характеризующие работу двигателя и обслуживающих его систем, а также дополнительные параметры, дающие возможность судить о тепловой и механической напряженности двигателя, о том, как обеспечиваются на данном режиме его надежность и экономичность. Напряжения в элементах конструкции двигате-
ля возникают под воздействием тепловых потоков со стороны газов и механических нагрузок, вызываемых силами действия газов и инерции движущихся масс. Непосредственное определение тепловых и механических напряжений затруднено, поэтому в эксплуатации прибегают к методам их косвенной оценки.
Показатели тепловой напряженности находятся в прямой зависимости от нагрузки цилиндра, характеризуемой средним индикаторным давлением, положением указателя нагрузки (УН) или топливной рейки (ТР).
Косвенными критериями тепловой нагрузки цилиндра служат удельные потоки тепла, отводимого от ЦПГ с выпускными газами и охлаждающими средами. За критерии принимаются температура выпускных газов и охлаждающих сред (воды и масла). Ценную информацию дает непосредственное измерение температуры втулки цилиндра в верхнем поясе в зоне нахождения первого-второго поршневых колец при положении поршня в ВМТ, в поясе выпускных и продувочных окон и перепада температур в огневом днище крышки, являющегося прямой функцией воспринимаемого ею теплового потока. Такие измерения в судовых двигателях являются составной частью ряда автоматизированных систем контроля и диагностики их технического состояния.
Термические напряжения, возникающие в деталях ЦПГ,
ot = Ajdq,
где S - толщина теплопередающей стенки, м; q - удельный тепловой поток через стенку, Дж:
я=а? охл — —
В свою очередь, относи- т1« т
тельные потери теплоты через
стенки цилиндра в охлаждающую <70XJI — С —_________ ^s
сРедУ охл у Я Yp8
После подстановки получим
Из этого выражения следует, что термические на- пряжения в ЦПГ двигателя увеличиваются с ростом величин Pi п, Ts а также при ухудшении сгорания топлива - снижении T]i и ps.
Показатели механической напряженности двигателя характеризуется несколькими параметрами. При анализе напряженного состояния элементов остова наиболее существенное значение имеет максимальное давление сгорания в цилиндрах Рг. Состояние деталей КШМ определяется совместным влиянием силы Pz и силы инерции движущихся масс Pj, являющихся со- ставляющими суммарной силы Р, максимальное значение которой
Р -Р-Р-
Л max z р
где Pj — сила инерции в ВМТ; Pj — тиRgd2(1+А,).
Значения Pz устанавливают на основе данных индицирования двигателя, а Ртах и Pj подсчитывают по приведенным формулам.
Итак - о величине механической напряженности двигателя на том или ином режиме его работы ориентировочно можно судить по Pz, Р и отношению Pz/Pj, которое характеризует динамику развития давления в начальной фазе сгорания, Желательно, чтобы оно не превышало 9,0 (рекомендаия MAN-BW).
Рабочие режимыу характеризуемые определенными условиями работы двигателяу объединяются в общее понятие характеристики двигателя. Характеристику принято представлять в виде графической зависимости энергетических, экономических и эксплуатационных показателей от одного из параметров двигателя, принимаемого в качестве независимого переменного. При этом, если в качестве независимого переменного принимают нагрузку, то характеристика называется нагрузочной, а если частоту вращения, то скоростной.
Из скоростных характеристик практический интерес представляют внешняя, частичные, винтовые и ограничительные характеристики.
§ 8.2. Нагрузочная и регуляторная характеристики
Нагрузочная характеристика представляет собой графическую зависимость основных показателей двигателя от нагрузки при постоянном скоростном режиме (гг = const).
Критерием нагрузки служит среднее эффективное давление ре, которое и принимают в качестве независимого переменного. При построении нагрузочной характеристики значения ре откладывают по оси абсцисс, а параметры, характеризующие работу двигателя, - по оси ординат (рис. 8.1).
По нагрузочной характеристике работают дизель-генераторы и главные двигатели, нагружаемые изменением шагового отношения Н/D гребного винта.
При уменьшении нагрузки цикловая подача топлива gy уменьшается, что, в свою очередь, сопровождается сокращением продолжительности подачи, снижением давления впрыска и качества распыливания топлива, особенно ощутимым в области малых нагрузок. Заряд воздуха Gb сокращается в связи с падением подачи турбокомпрессора, либо остается почти без изменений (в двигателе без наддува). Отмеченные изменения gu и GB приводят к тому, что коэффициент избытка воздуха а = Gb/ igifio) при уменьшении нагрузки увеличивается (см. рис. 8.1). Это обусловливает улучшение сгорания топлива и увеличение индикаторного КПД. Однако при переходе в область малых нагрузок рост коэффициента >/, замедляется и в отдельных случаях возможно даже некоторое его снижение, что объясняется ухудшением распыливания и сгорания топлива, и увеличением относительных потерь теплоты в охлаждающую воду.
Индикаторный расход топлива gi = 3600!(QH rji) является обратной функцией индикаторного КПД, и поскольку т/,- при уменьшении нагрузки растет, то удельный индикаторный расход топлива убывает.
На характер изменения удельного эффективного расхода топлива ge = gi/rjMex оказывают совместное влияние g, и цмех.
Для выявления зависимости г\мех (ре) воспользуемся выраже- нием ч мех = I - (NuEx/Ni).
Мощность механических потерь практически не зависит от нагрузки, поэтому с уменьшением давления ре остается неизменной, в то время как индикаторная мощность N, убывает. В итоге механический КПД уменьшается, что отрицательно сказывается на удельном эффективном расходе топлива и экономичности работы двигателя. Несмотря на снижение индикаторного расхода, кривая эффективного расхода ge (см. рис. 8.1) при уменьшении нагрузки круто поднимается и лишь на небольшом участке - от Ре ном ДО (0,75-0,8) Ре ном удельный расход топлива несколько понижается, и наиболее экономичный режим работы двигателя, как правило, обеспечивается при нагрузке, соответствующей Ре = (0,7-0,8) Реном.
О тепловой и механической напряженности, как уже отмечалось, косвенно можно судить по температуре выпускных газов tgf и максимальному давлению цикла Pz. Последние с увеличением нагрузки растут и наибольших значений достигают при Ре ном5 поэтому и наиболее напряженным является режим полной нагрузки.
Принятое при анализе нагрузочной характеристики условие п = const в действительности не выдерживается. Частота вращения в силу неравномерности работы регулятора с увеличением нагрузки от Ре = О (холостой ход) до Ре ном (полная нагрузка) несколько уменьшается. Поэтому зависимость ре (п), называемая регуляторной характеристикой, в координатах Ре-п изображается не вертикалью пА = const (рис. 8.2), а линией л/, угол наклона которой к оси абсцисс зависит от степени неравномерности регулятора (последняя обычно не превышает 2-3%).
На рис. 8.2 приведены типичные регуляторные характеристики, отражающие связь между Ре и п для нескольких случаев настройки регулятора на заданные значения скоростного режима двигателя. Допустим, что двигатель работает в режиме, характеризуемом точкой А, тогда при уменьшении нагрузки с Рел до РеБ регулятор автоматически уменьшит подачу топлива, и двигатель по регуляторной характеристике и/ перейдет на новый режим, определяемый точкой Б.
При этом в силу неравномерности регулятора новая частота вращения пБ станет больше прежней пА.
 |  | | |  |

|  |
|



 Рис. 8.2. Регуляторные характеристики
Рис. 8.2. Регуляторные характеристики
§ 8.3. Внешние и частичные характеристики
При эксплуатации главных судовых двигателей часто изменение нагрузки влечет за собой изменение частоты вращения, несмотря на неизменное положение органа управления топливными насосами. Подобным условиям отвечают внешняя или частичные характеристики, под которыми понимается графическая или аналитическая зависимость показателей двигателя от частоты вращения при строго фиксированном положении органа управления топливными насосами (топливная рейка TP = const), что обеспечивает сохранение неизменности активного хода плунжера.
Внешние характеристики
Кривая ТРном = const (рис. 8.3, а, б) внешняя номинальная характеристика, соответствующая работе двигателя в условиях изменяющихся нагрузки и частоты вращения при активном ходе плунжера Ином или соответствующем ему положении топливной рейки ТРНом> обеспечивающем номинальную мощность NemM и среднее эффективное давление Реном при номинальном скоростном режиме пном.
Под номинальной максимальной длительной мощностью (MCR) понимается наибольшая гарантируемая за- водом-строителем эффективная мощность, которую двигатель может развивать в течение длительного времени при номинальном скоростном режиме пном и нормальных атмосферных условиях (ро ~ ЮО кПа, То - 27°С и относительная влажность ср - 60%), а также при сопротивлении на впуске, противодавлении выпуску, оговоренных в инструкции температуре и давлении в системах смазки и охлаждения, рекомендованных сортах топлив и масел (QH = 42,7 МДж/кг). Условия работы в эксплуатации обычно отличны от стендовых, поэтому на номинальной мощности из-за опасности перегрузки двигатель работает редко.
Дата добавления: 2016-05-16; просмотров: 872;