Частотне регулювання швидкості асинхронних електроприводів
Принципова можливість регулювання кутової швидкості асинхронного двигуна зміною частоти напруги живлення  слід безпосередньо з виразу:
слід безпосередньо з виразу:
 .
.
Харчування асинхронних двигунів здійснюється при цьому не від загальної мережі, а від перетворювача частоти ПЧ, показаного на рис. 6.5,енергія до якого підводиться від мережі постійної частоти f 1С та напруги U 1С. На виході перетворювача, як правило, змінюється не тільки частота f 1, але й напруга U 1. Для перетворення частоти можуть бути використані електромашинні або напівпровідникові пристрої, що розрізняються за принципом дії і конструкції.
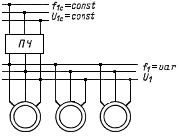
Малюнок 6.5 - Схема включення асинхронних двигунів, які отримують живлення від перетворювача частоти
При регулюванні частоти виникає також необхідність регулювання напруги джерела живлення. Дійсно, е.. д. с. обмотки статора асинхронного двигуна пропорційна частоті і потоку:

З іншого боку, нехтуючи в першому наближенні падінням напруги на опорах обмотки статора, тобто вважаючи  , Можна записати:
, Можна записати:

Або 
З наведеного вираження випливає, що при незмінній напрузі джерела живлення  і регулювання його частоти змінюється магнітний потік асинхронного двигуна. Зокрема, зменшення частоти призводить до зростання потоку і як наслідок до насичення машини і збільшення струму намагнічування, що пов'язано з погіршенням енергетичних показників двигуна, а в ряді випадків і з його неприпустимим нагріванням. Збільшення частоти призводить до зниження потоку двигуна, що при постійному моменті навантаження на валу відповідно, з виразом
і регулювання його частоти змінюється магнітний потік асинхронного двигуна. Зокрема, зменшення частоти призводить до зростання потоку і як наслідок до насичення машини і збільшення струму намагнічування, що пов'язано з погіршенням енергетичних показників двигуна, а в ряді випадків і з його неприпустимим нагріванням. Збільшення частоти призводить до зниження потоку двигуна, що при постійному моменті навантаження на валу відповідно, з виразом  призводить до зростання струму ротора, тобто до перевантаження його обмоток по струму при недовикористаної сталі. Крім того, з цим пов'язано зниження максимального моменту і перевантажувальної здатності двигуна. Для найкращого використання асинхронного двигуна при регулюванні швидкості зміною частоти необхідно регулювати напругу одночасно вфункції частоти і навантаження.
призводить до зростання струму ротора, тобто до перевантаження його обмоток по струму при недовикористаної сталі. Крім того, з цим пов'язано зниження максимального моменту і перевантажувальної здатності двигуна. Для найкращого використання асинхронного двигуна при регулюванні швидкості зміною частоти необхідно регулювати напругу одночасно вфункції частоти і навантаження.
Регулювання напруги лише у функції однієї частоти з урахуванням характеристики механізму може бути реалізовано в розімкнутих системах частотного керування.
Регулювання напруги в функції навантаження можна здійснити, як правило, лише в замкнутих системах, в яких при використанні зворотних зв'язків напруга при даній частоті може змінюватися в залежності від навантаження.
У міру зниження частоти при  падає частка е.. д. с. по відношенню до прикладеній напрузі внаслідок відносного зростання падіння напруги в опорі статора із зростанням навантаження, що призводить до зменшення магнітного потоку, а, отже, до зниження електромагнітного моменту. Як наслідок зменшення магнітного потоку і абсолютного критичного ковзання в міру зниження частоти падає максимальний момент і знижується жорсткість механічних характеристик (див. рис. 6.6).
падає частка е.. д. с. по відношенню до прикладеній напрузі внаслідок відносного зростання падіння напруги в опорі статора із зростанням навантаження, що призводить до зменшення магнітного потоку, а, отже, до зниження електромагнітного моменту. Як наслідок зменшення магнітного потоку і абсолютного критичного ковзання в міру зниження частоти падає максимальний момент і знижується жорсткість механічних характеристик (див. рис. 6.6).

Малюнок 6.6 - Механічні характеристики асинхронного двигуна при частотному управлінні з законом .
Зміна частоти джерела живлення дозволяє регулювати швидкість асинхронного двигуна як вище, так і нижче основної. Зазвичай при регулюванні вище основної швидкості частота джерела живлення перевищує номінальну не більше ніж в 1,5  2 рази. Зазначене обмеження зумовлене, насамперед, міцністю кріплення обмотки ротора. Крім того, зі зростанням частоти харчування помітно збільшуються величини потужності втрат, пов'язані з втратами в сталі статора. Регулювання швидкості вниз від основної, як правило, здійснюється в діапазоні до 10 15. Нижня межа частоти обмежений складністю реалізації джерела живлення з низькою частотою, можливістю нерівномірності обертання і рядом інших факторів. Таким чином, частотне регулювання швидкості асинхронного двигуна може здійснюватися в діапазоні до 20-30.Використання двигунів спеціальної конструкції дає можливість розширити діапазон регулювання за рахунок збільшення верхньої межі швидкості. Нижня межа швидкості може бути зменшений шляхом введення в схему управління різних зворотних зв'язків.
2 рази. Зазначене обмеження зумовлене, насамперед, міцністю кріплення обмотки ротора. Крім того, зі зростанням частоти харчування помітно збільшуються величини потужності втрат, пов'язані з втратами в сталі статора. Регулювання швидкості вниз від основної, як правило, здійснюється в діапазоні до 10 15. Нижня межа частоти обмежений складністю реалізації джерела живлення з низькою частотою, можливістю нерівномірності обертання і рядом інших факторів. Таким чином, частотне регулювання швидкості асинхронного двигуна може здійснюватися в діапазоні до 20-30.Використання двигунів спеціальної конструкції дає можливість розширити діапазон регулювання за рахунок збільшення верхньої межі швидкості. Нижня межа швидкості може бути зменшений шляхом введення в схему управління різних зворотних зв'язків.
Якщо при регулюванні частоти напруга змінюється таким чином, що Ф = const, то допустимий момент на валу асинхронного двигуна при частотному регулюванні швидкості також буде незмінним (  ).
).
Цей спосіб регулювання дозволяє отримати жорсткі механічні характеристики. Втрати потужності при частотному управлінні невеликі. Це випливає з виразу

з урахуванням того, що двигун при зміні частоти працює на лінійних ділянках механічних характеристик, тобто при малих ковзаннях s. При наявності відповідного перетворювача частоти можна отримати будь-яку плавність регулювання. Важливо відзначити, що зазначені позитивні властивості можна реалізувати з безконтактним асинхронним короткозамкненим двигуном, який є найбільш простим, надійним і дешевим електричним двигуном.
Частотне регулювання кутової швидкості електроприводів змінного струму з двигунами з короткозамкненим ротором знаходить все більше застосування в різних галузях техніки. Наприклад, в установках текстильної промисловості, де за допомогою одного перетворювача частоти, який живить групу асинхронних двигунів, що знаходяться в однакових умовах, плавно і одночасно регулюються їх кутові швидкості.Прикладом іншої установки з частотно-регульованими асинхронними двигунами з короткозамкненим ротором можуть служити транспортнірольганги в металургійній промисловості, деякі конвеєри та ін
Частотне регулювання кутової швидкості асинхронних двигунів широко застосовується в індивідуальних установках, коли потрібне отримання досить високих кутових швидкостей (наприклад, для центрифуг, шліфувальних верстатів, для приводу електрошпінделем в металорізальних верстатах з частотою обертання до 20 000 об / хв).
Економічні вигоди частотного регулювання особливо істотні для приводів, що працюють в повторно-короткочасному режимі, де має місце часта зміна напрямку обертання з інтенсивним гальмуванням.
Основним недоліком електроприводів з частотним управлінням є необхідність використання перетворювачів частоти, які в даний час характеризуються відносною складністю в схемного виконання і високою вартістю. Цей недолік обмежує застосування частотноуправляемих електроприводів. Тим не менш, переваги цих приводів настільки значні, що протягом багатьох років і в даний час ведуться інтенсивні роботи зі створення перетворювачів частоти для регулювання швидкості асинхронних двигунів.
У разі створення прийнятних за складності та вартості перетворювачів частоти частотноуправляемий привід з асинхронним короткозамкненим двигуном отримає широке поширення в техніці.
Дата добавления: 2016-05-11; просмотров: 1972;