Реостатне регулювання кутової швидкості асинхронних двигунів
Введення резисторів в ланцюг ротора (реостатне регулювання) дозволяє, як і для двигунів постійного струму, регулювати кутову швидкість двигуна. Регулювання здійснюється вниз від основної кутовий швидкості. Плавність регулювання залежить від числа ступенів включаються резисторів.
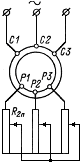
Для асинхронних двигунів з фазним ротором застосовується регулювання швидкості шляхом зміни опорів в ланцюзі ротора, а для двигунів з короткозамкненим ротором використовуються опору в ланцюзі статора, як це показано на рис. 6.1
 а)
а) 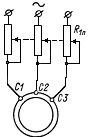 б)
б)
Малюнок 6.1-Схеми включення резисторів в ланцюг ротора а) і статора б)
 (6-1)
(6-1)
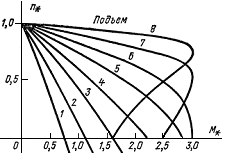
Згідно виразами (6-1) при збільшенні активного опору вторинної ланцюга збільшується критичне ковзання, і механічна характеристика стає більш м'якою (див. рис. 6.2).

а) б)
Малюнок 6.2 - Механічні характеристики асинхронного двигуна при регулюванні швидкості зміною опору в ланцюзі ротора а) і статора б)
При збільшенні ковзання в 2 рази в порівнянні з номінальною, тобто при зниженні швидкості всього лише на 8  15%, допустимий момент зменшується в 2 рази. З цієї причини діапазон регулювання зазвичай не перевищує (1,5 2): 1.
15%, допустимий момент зменшується в 2 рази. З цієї причини діапазон регулювання зазвичай не перевищує (1,5 2): 1.
При незмінному моменті навантаження і реостатному управлінні втрати потужності в роторної ланцюга змінюються пропорційно ковзання, а втрати в статорі не залежать від ковзання і залишаються незмінними при даному моменті навантаження. Якщо, наприклад, швидкість двигуна знижена вдвічі в порівнянні з номінальною, то приблизно половина всієї споживаної з мережі потужності втрачається у регулювальних резисторах. Отже, із зростанням регулювального опору при одному і тому ж ковзанні знижується к. п. д.
Даний спосіб регулювання швидкості пов'язаний зі значними втратами енергії в додатковому опорі і тому малоекономічен. Він застосовується головним чином при короткочасній або повторно-короткочасній роботі (наприклад, пуско-налагоджувальні режими деяких машин, крани пристрої та інші), а також у приводах з вентиляторним моментом. В останньому випадку потужність на валу із зменшенням швидкості швидко знижується, і тому потужність ковзання і втрати в ланцюзі ротора за величиною обмежені.
До недоліків реостатного регулювання швидкості ставляться також м'якість механічних характеристик і залежність діапазону регулювання від величини навантаження. Зокрема, регулювання швидкості на холостому ходу практично неможливо.
Реостатне регулювання швидкості асинхронного двигуна з фазним ротором продовжує знаходити практичне застосування при невисоких вимогах до точності регулювання.
Реостатне регулювання завдяки своїй простоті знаходить практичне застосування, наприклад, в приводі підйомно-транспортних пристроїв, вентиляторів і насосів малої та середньої потужності (до 100 кВт).
Дата добавления: 2016-05-11; просмотров: 947;