Регулювання швидкості двигуна зміною потоку збудження
Цей принцип регулювання слід безпосередньо з аналізу виразів для швидкісної і механічної характеристики:
Струм збудження, а значить, і потік можуть змінюватися лише в бік зменшення в порівнянні з номінальними, так як за умовами нормальної роботи обмотки збудження струм в ній не може тривало перевершувати номінальну величину. Крім того, навіть короткочасне збільшення  виявляється неефективним, тому що в більшості випадків магнітні кола електричних машин вже при номінальному потоці близькі і насичення. Отже, мова йде лише про регулювання швидкості шляхом зниження потоку або, як прийнято говорити, шляхом ослаблення потоку збудження. Основною перевагою даного методу регулювання є те, що потужність обмотки збудження невелика і становить, як правило, 2
виявляється неефективним, тому що в більшості випадків магнітні кола електричних машин вже при номінальному потоці близькі і насичення. Отже, мова йде лише про регулювання швидкості шляхом зниження потоку або, як прийнято говорити, шляхом ослаблення потоку збудження. Основною перевагою даного методу регулювання є те, що потужність обмотки збудження невелика і становить, як правило, 2  5% потужності двигуна. Для машин малої, а іноді і середньої потужності зазвичай використовуються резистори в колі збудження (рис. 5.3, а), а для великих машин - спеціальні перетворювачі, наприклад генератори, електромашинні підсилювачі, магнітні підсилювачі, регулятори напруги, вентильні перетворювачі (рис. 5.3, б).
5% потужності двигуна. Для машин малої, а іноді і середньої потужності зазвичай використовуються резистори в колі збудження (рис. 5.3, а), а для великих машин - спеціальні перетворювачі, наприклад генератори, електромашинні підсилювачі, магнітні підсилювачі, регулятори напруги, вентильні перетворювачі (рис. 5.3, б).
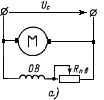
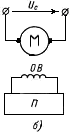
Малюнок 5.3 - Схеми включення двигуна при регулюванні швидкості зміною магнітного потоку
З рівності
випливає, що для того, щоб при різних потоках  ерс
ерс  була дорівнює одному і тому ж номінальній напрузі мережі
була дорівнює одному і тому ж номінальній напрузі мережі  , Частота обертання повинна збільшуватися назад пропорційно ослаблення потоку. Наприклад, якщо потік ослаблений вдвічі, то частота обертання повинна збільшитися також удвічі і т. д.
, Частота обертання повинна збільшуватися назад пропорційно ослаблення потоку. Наприклад, якщо потік ослаблений вдвічі, то частота обертання повинна збільшитися також удвічі і т. д.
Електромеханічним характеристикам  при зміні струму збудження відповідають різні значення кутової швидкості ідеального холостого ходу, що визначаються за:
при зміні струму збудження відповідають різні значення кутової швидкості ідеального холостого ходу, що визначаються за:

На рис. 5.4 по осі ординат відкладено значення кутової швидкості ідеального холостого ходу  для природної характеристики, коли потік
для природної характеристики, коли потік  .
.
Значення кутових швидкостей ідеального холостого ходу при ослабленому потоці  і лежать, очевидно, вище .
і лежать, очевидно, вище .
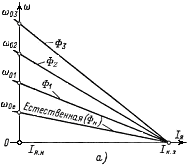
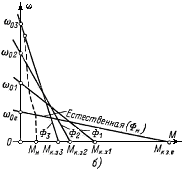
Малюнок 5.4 - Електромеханічні і механічні характеристики двигуна постійного струму паралельного збудження при регулюванні кутової швидкості струмом порушення
Всі електромеханічні характеристики перетинаються з віссю абсцис в одній точці. Останнє випливає з того, що при  рівняння для будь-якої електромеханічної характеристики має вигляд:
рівняння для будь-якої електромеханічної характеристики має вигляд:
звідки визначається струм в якорі двигуна
 .
.
Отже, при різних струмах порушення і при кутовий швидкості двигуна, що дорівнює нулю, струм в якірного ланцюга дорівнює струму короткого замикання двигуна. Цим значенням струму і визначається загальна точка перетину електромеханічних характеристик.
Механічні характеристики, показані на рис. 5.4, мають ті ж значення кутових швидкостей ідеального холостого ходу, що і для електромеханічних характеристик. Це випливає з . Однак ці характеристики не перетинаються в одній точці на осі абсцис, так як у міру зменшення потоку зменшується і момент короткого замикання, що визначається за формулою:

Діапазон регулювання обмежується різними чинниками. Головним з них є погіршення умов комутації з зростанням кутовий швидкості, оскільки реактивна ЕРС, що викликає іскріння на колекторі пропорційна току і кутовий швидкості, тобто  . Крім того, при великих кутових швидкостях потрібно підвищувати механічну міцність якоря. Нижня межа кутовий швидкості обмежується ступенем насичення машини і нагріванням обмотки збудження, тобто номінальною кутовою швидкістю. Більшість двигунів незалежного збудження, не призначених для регулювання швидкості, і допускають підвищення її тільки на 10 20%. Двигуни, спеціально сконструйовані для роботи з регулюванням швидкості, дають можливість працювати зі швидкістю, в 3 5 разів перевищує швидкість ідеального холостого ходу при номінальному значенні магнітного потоку.
. Крім того, при великих кутових швидкостях потрібно підвищувати механічну міцність якоря. Нижня межа кутовий швидкості обмежується ступенем насичення машини і нагріванням обмотки збудження, тобто номінальною кутовою швидкістю. Більшість двигунів незалежного збудження, не призначених для регулювання швидкості, і допускають підвищення її тільки на 10 20%. Двигуни, спеціально сконструйовані для роботи з регулюванням швидкості, дають можливість працювати зі швидкістю, в 3 5 разів перевищує швидкість ідеального холостого ходу при номінальному значенні магнітного потоку.
Стабільність кутовий швидкості при регулюванні визначається відносним перепадом кутовий швидкості при зміні навантаження. У даному випадку при номінальному струмі якоря як  , Тому незалежно від струму збудження відносний перепад зберігається одним і тим же для природного та штучного характеристик, тобто кутова швидкість порівняно стабільна.
, Тому незалежно від струму збудження відносний перепад зберігається одним і тим же для природного та штучного характеристик, тобто кутова швидкість порівняно стабільна.
Слід відзначити, що ослаблення потоку однозначно призводить до зростання швидкості тільки в тому випадку, коли момент навантаження на валу двигуна обернено пропорційний швидкості. Якщо ж  = Const, то збільшення швидкості буде мати місце лише до певного значенні
= Const, то збільшення швидкості буде мати місце лише до певного значенні  . При подальшому зниженні потоку почнеться і зниження кутової швидкості, так як у випадку = Const ослаблення потоку призводить до збільшення струму якоря
. При подальшому зниженні потоку почнеться і зниження кутової швидкості, так як у випадку = Const ослаблення потоку призводить до збільшення струму якоря  , А значить, і до збільшення падіння напруги на опорах ланцюга якоря. Починаючи з деякого значення потоку в процесі його зниження зростання швидкості ідеального холостого ходу йде повільніше, ніж зменшується швидкість, обумовлена падінням напруги на .
, А значить, і до збільшення падіння напруги на опорах ланцюга якоря. Починаючи з деякого значення потоку в процесі його зниження зростання швидкості ідеального холостого ходу йде повільніше, ніж зменшується швидкість, обумовлена падінням напруги на .
Оцінюючи енергетичні показники даного способу регулювання швидкості двигунів постійного струму з паралельним збудженням, необхідно відзначити, що втрати в силовому ланцюзі двигуна і його ККД такі ж, як і під час роботи на природній характеристиці. Слід також враховувати, що у зв'язку з відносно малою потужністю ланцюга обмотки збудження в порівнянні з номінальною потужністю двигуна витрати на регулювальні пристрої (реостати або перетворювачі в ланцюзі обмотки збудження) невеликі.
Двигуни незалежного збудження, регульовані шляхом ослаблення потоку, широко застосовуються для приводу механізмів, потужність яких зі зміною швидкості залишається постійною.
Вплив параметрів (Опір роторної ланцюга), , F на вигляд механічних характеристик асинхронного двигуна з короткозамкненим та фазним ротором. Способи регулювання швидкості обертання асинхронних двигунів
в останні роки з розвитком напівпровідникової техніки все більша увага приділяється застосуванню різних систем регульованих електроприводів змінного струму з асинхронними двигунами з короткозамкненим або фазним ротором.
Застосування двигунів змінного струму обумовлена їх простотою, дешевизною, підвищеною надійністю, істотно (у 2 3 рази) меншими габаритами і масою в порівнянні з двигунами постійного струму. Крім того, деякі способи регулювання кутової швидкості не вимагають спеціальних перетворювальних пристроїв.
Відзначаючи переваги двигунів змінного струму, не можна не звернути уваги на те, що відносно прості способи регулювання кутової швидкості електроприводів змінного струму володіють і рядом недоліків, до яких можна віднести в одному випадку невелику плавність, в іншому - невисокі енергетичні показники і т. д. Більше ефективні способи регулювання здійснюються за допомогою порівняно складних перетворювальних пристроїв і засобів управління.
Найбільшого поширення набули наступні способи регулювання кутової швидкості асинхронного двигуна: 1) реостатне регулювання; 2) перемиканням кількості пар полюсів; 3) частотне регулювання; 4) зміною напруги на статорі; 5) каскадним включенням асинхронного двигуна з іншими машинами або перетворювачами. Для регулювання кутової швидкості, крім згаданих, можуть бути використані деякі інші способи включення електричних двигунів: імпульсне регулювання, регулювання зміною підводиться до статора напруги, регулювання за допомогою електромагнітної муфти ковзання і ін
Дата добавления: 2016-05-11; просмотров: 1851;