Регулювання кутової швидкості асинхронного електроприводу зміною напруги
Якщо регулювати напругу, що підводиться до трьох фаз статора асинхронного двигуна, то можна, нехтуючи впливом регулюючого пристрою на характеристики двигуна, змінювати максимальний момент, не змінюючи критичного ковзання. Для зміни напруги на затискачах статора можуть використовуватися різні пристрої: автотрансформатори, дроселі насичення, тиристорні регулятори напруги.
У разі ненасиченої магнітної кола машини максимальний момент при зниженій напрузі знижується пропорційно квадрату напруги:
де  ,
,  - Відповідно максимальні моменти, що розвиваються двигуном при зниженому і номінальному напругах;
- Відповідно максимальні моменти, що розвиваються двигуном при зниженому і номінальному напругах;  ,
,  - Відповідно понижений та номінальне напруги.
- Відповідно понижений та номінальне напруги.
Критичне ковзання, що не залежить від напруги, залишається незмінним. Не змінюється також і синхронна кутова швидкість, яка залежить тільки від частоти живлячої напруги і числа пар полюсів двигуна.
Регулювання кутової швидкості двигуна при цьому способі відбувається за рахунок зменшення модуля жорсткості механічних характеристик і здійснюється вниз від номінальної кутової швидкості. Плавність регулювання визначається плавністю зміни напруги; при застосуваннітиристорного регулятора напруги кутова швидкість регулюється безступінчатий.
Механічні характеристики двигуна з короткозамкненим ротором при регулюванні напруги на статорі наведено на рис. 6. З цих характеристик слід, що межі регулювання вельми обмежені навіть при використанні вентиляторної навантаження, але вони можуть бути істотно розширені в замкнутих системах електроприводу. У дійсності внаслідок зменшення критичного ковзання через вплив параметрів регулюючого пристрою межі регулювання в розімкнутих системах ще зменшуються.
Так як великі втрати потужності ковзання в двигуні з короткозамкненим ротором виділяються в самому роторі, то допустимий момент різко зменшується у міру зростання ковзання, тому такий неекономічний спосіб регулювання кутової швидкості асинхронного двигуна з короткозамкненим ротором можна використовувати тільки при малій потужності двигуна й у короткочасному режимі роботи .
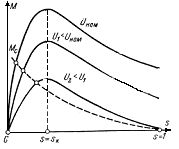
Малюнок 6.3 - Механічні характеристики двигуна з короткозамкненим ротором при регулюванні напруги на статорі
Краще використання двигуна і більш сприятливі характеристики можуть бути отримані, якщо застосувати двигун з фазним ротором, в роторну ланцюг його включити додатковий нерегульований резистор і регулювати напругу на статорі (рис. 6.4, а). Механічні характеристики для даного способу наведено на рис. 6.4, б. Перевага цього способу в порівнянні з реостатним полягає в тому, що управління двигуном здійснюється плавно і виключається контактна апаратура в роторної ланцюга.
Втрати енергії в приводі виходять приблизно такими ж або трохи більше, як і при реостатному регулюванні; втрати потужності ковзання в основному виносяться з двигуна і виділяються в додатковому резистори, що збільшує допустимий момент. Цей спосіб може бути використаний при вентиляторної навантаженням для тривалого режиму, а при М з = const для короткочасного режиму роботи. Очевидно, що регулювання зміною напруги може бути здійснено тільки вниз від основної кутовий швидкості.
Механічні характеристики (рис. 6.4, б) в міру зниження напруги стають м'якими і не забезпечують стабільності кутовий швидкості при можливе відхилення навантаження. Крім того, наявність постійно включеного резистора призводить до недовикористання двигуна по швидкості (кутова швидкість завжди менше номінальної) і по потужності. Підвищення стабільності кутовий швидкості і розширення діапазону регулювання до (5  10): 1 досягається у замкнутих системах.
10): 1 досягається у замкнутих системах.
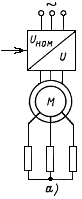
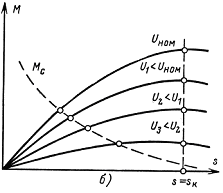
Малюнок 6.4 - Схема включення двигуна з фазним ротором з нерегульованим резистором у роторної ланцюга і регулюванням напруги на статорі (а) і механічні характеристики (б)
Для регулювання напруги використовуються як тиристорні регулятори напруги з фазовим керуванням, так і реактори насичення, автотрансформатори і імпульсні, наприклад тиристорні або контактні регулюючі пристрої.
Якщо регулювання швидкості здійснюється за допомогою тиристорного регулятора напруги з фазовим керуванням, то виникають додаткові втрати в двигуні, обумовлені вищими гармоніками в кривій напруги. Втрати в міді статора і ротора за рахунок вищих гармонік зростають у середньому на 10%. Загальні електромагнітні втрати у міді і стали двигуна, розраховані з урахуванням вищих гармонік, зростають не більше ніж на 10-12% в порівнянні з загальними втратами, визначені при синусоїдальному напрузі.
При зниженні напруги, що підводиться до статора, зменшується магнітний потік двигуна, що при сталості моменту навантаження призводить до зростання струмів ротора і статора, тому зростають втрати і перевищення температури обмоток двигуна. Зростання втрат і, крім того, погіршення умов вентиляції двигуна зі зменшенням кутовий швидкості призводить до необхідності зниження допустимої моменту.
Регулювання швидкості зміною напруги, що підводиться до статора, знаходить застосування переважно при використанні двигунів невеликої потужності (до 20 30 кВт) з контактними кільцями при включенні додаткового опору в роторної ланцюга для механізмів повторно-короткочасного і короткочасного режимів роботи.
Дата добавления: 2016-05-11; просмотров: 2056;