Лекция № 2.4. (2 часа). Тема: Устройства улучшающие управляемость судов
- Назначение и виды средств активного управления судном.
Безопасность плавания судна во многом определяется одним из важнейших его маневренных качеств — управляемостью. Потеря судном управляемости очень часто влечет за собой аварии. Кормовой руль, с давних времен применяемый в качестве средства управления судном, обладает существенным недостатком. Он заключается в том, что создаваемый рулем боковой упор, пропорциональный квадрату скорости судна, на малых ходах настолько мал, что не может обеспечить необходимую управляемость, особенно при ветре и на волнении. Поэтому на судах все более широко применяют средства активного управления(САУ), создающие боковой упор, основанный на реактивном действии струи воды отбрасываемой крылаткой от борта, что позволяет судну сохранять управляемость на малых ходах и без хода. Главное достоинство всех САУ — возможность эффективного самостоятельного маневрирования судна в стесненных условиях — расширяет область применения этих устройств. В силу этого, несмотря на относительно высокие первоначальные затраты, многие вновь строящиеся речные и морские суда различного назначения (в том числе транспортные) оборудуются либо одним, либо несколькими САУ. Развитие и усовершенствование САУ ведется по трем основным направлениям: подруливающие устройства, активные рули и винторулевые (откидные и выдвижные) колонки, устанавливаемые в качестве главных или вспомогательных движителей.
Средства активного управления судами подразделяют на две группы (см. рис.1). К первой относятся САУ, функционально совмещённые с главными движителями или использующие отбрасываемую гребным винтом струю. САУ этой группы могут выполнять функции судового руля. Ко второй группе относятся САУ, работающие независимо от основных движителей судна. Эти САУ более эффективны при отсутствии хода или при движении судна с малой скоростью. САУ этой группы обычно называют подруливающими устройствами.
Основные САУ первой группыследующие:
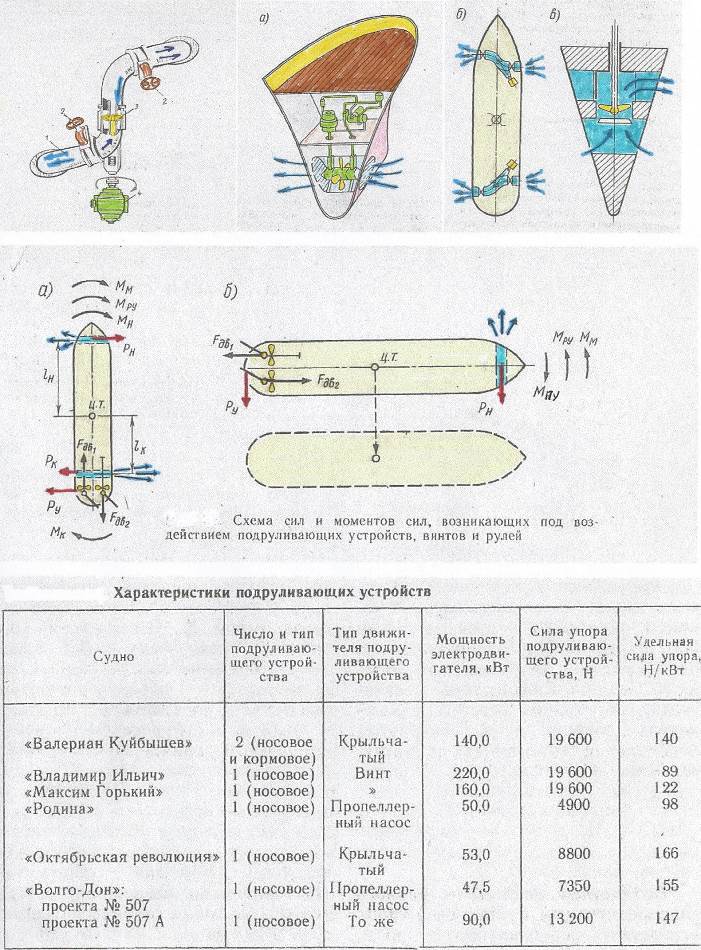
1. Крыльчатый движитель, расположенный под днищем корпуса, создает переменный по направлению упор. Если установить два крыльчатых движителя, то судно получает возможность удерживаться на месте, перемещаться лагом, совершать различные маневры на малых скоростях хода.
2. Поворотная направляющая насадка обеспечивает управление судном за счет реакции, возникающей при изменении направления струи, отбрасываемой гребным винтом, и перераспределения давления на поверхности переложенной насадки.
3. Установка двух поворотных насадок (РПН), каждая из которых может быть переложена независимо от другой, обеспечивает судну не только высокую управляемость, но и возможность перемещения лагом.
4. Поворотная винтовая колонка (ПВК) (см. табл.1) представляет собой гребной винт в насадке, направление тяги которого может изменяться в любом диапазоне за счет поворота всего устройства относительно вертикальной оси. Такой тип САУ обеспечивает судну хорошую управляемость во всех режимах эксплуатации. Установка двух колонок позволяет судну перемещаться лагом.
Таблица 1 - Характеристика винтовых колонок
| Марка колонки | Мощность, кВт | Диаметр винта, м | Тяга, кН |
| ВДРК-30 | 0,60 | 5,9 | |
| ВДРК-70 | 0,70 | 11,8 | |
| ВДРК-100 | 1,00 | 27,5 | |
| ВДРК-500 | 1,25 | 78,5 |
5.Много перьевые рулевые системы представляющие собой группу открытых перьев рулей расположенных за и/или впереди движителей судна, работающие синхронно но имеющие различные углы перекладки, что позволяет создавать экран отклоняющий струю отбрасываемую движителями на 900, т.е. создавать боковой упор большой величины.
Основные САУ второй группы следующие:
1. Активный руль представляет собой обычный руль с прямугольным контуром, в районе задней кромки которого размещен вспомогательный гребной винт. Направление упора, создаваемое этим винтом, изменяется при перекладке руля, что позволяет судну маневрировать даже при отсутствии хода.
2. Подруливающее устройство с крыльчатым движителем применяют на больших судах, у которых крыльчатый движитель может быть размещен в оконечностях без существенных изменений формы корпуса. К недостаткам этого устройства следует отнести низкую надежность, связанную с выступающими ниже плоскости днища лопастями движителя.
3. Выдвижные винтовые колонки в отличие от активного руля могут быть подняты в специальную шахту в корпусе судна, чтобы не создавать дополнительного сопротивления судну. Вращаясь вокруг вертикальной оси на 360°, колонка позволяет получать тягу в любом направлении, не прибегая к реверсу двигателя привода. Колонка имеет небольшие габариты и может быть установлена как отдельный модульный агрегат в любом районе судна.
Так как в рабочем положении винтовая колонка, как правило, выступает за габариты корпуса судна, следует учитывать, что в этом случае она защищена от повреждений в меньшей степени.
Подруливающие устройства туннельного типа получили в настоящее время наибольшее распространение. Для создания упора в них используют гребные винты, крыльчатые движители и водометы
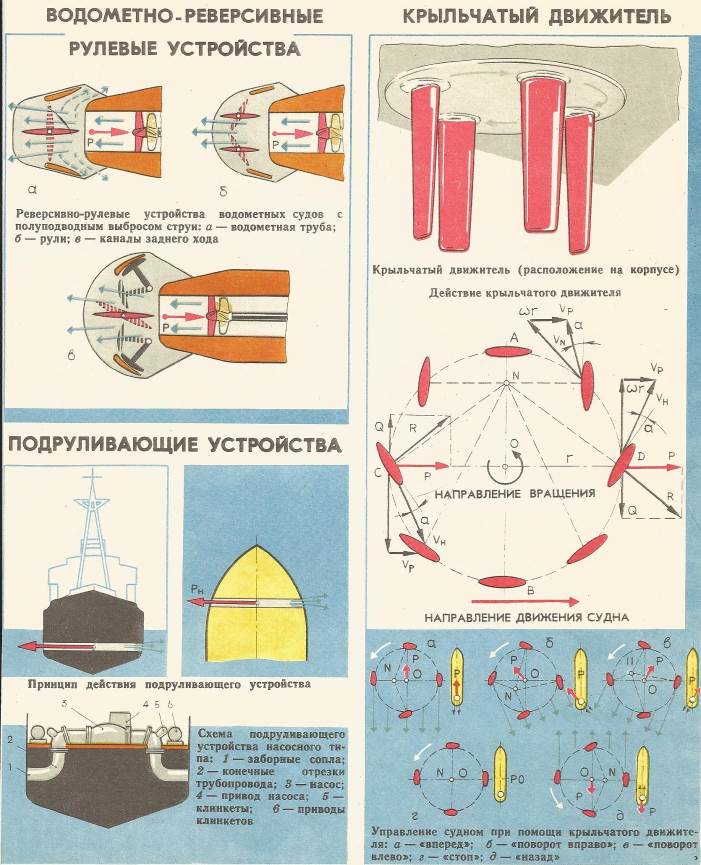
Крыльчатые движители.Крыльчатый движитель — это устройство, использующееся не только для создания упора, но и для изменения его направления. Помимо этого, крыльчатый движитель позволяет регулировать его гидродинамические характеристики, т. е. сочетает в себе свойства движителя регулируемого шага и средства управления.
Впервые крыльчатый движитель (КД), получивший практическое применение, был предложен в 1926 г. австрийским инженером Шнейдером. В настоящее время крыльчатые движители изготовляют и в РФ, и в ряде зарубежных стран. Они применяются на судах как в качестве основною движителя (буксиры, паромы, плавкраны, рыболовные суда), так и в виде вспомогательного средства управления (большие морские суда — пассажирские, танкеры). В первом случае движитель располагается непосредственно под днищем судна, во втором — чаще всего в поперечном канале корпуса.
Конструктивно крыльчатый движитель представляет собой диск (ротор) с вертикальной осью вращения, установленный заподлицо с днищевой обшивкой (либо с платформой, если движитель расположен в поперечном канале). Диск несет на себе 4—8 поворотных вертикальных лопастей, размещенных на равном расстоянии друг от друга по окружности диска и представляющих собой профилированные крылья. При вращении движителя каждая лопасть совершает вращательное движение по отношению к диску и вместе с диском — относительно воды. В воде находятся только лопасти, а механизмы вращения диска и поворота лопастей размещены внутри корпуса судна.
Суда, оборудованные крыльчатыми движителями, имеют ряд преимуществ перед винтовыми:
- сочетание функций винта и руля, вследствие чего отпадает необходимость в рулевом устройстве;
- возможность направления силы тяги в любую сторону;
- некоторое повышение к. п. д. установки в сравнении с к. п. д. ВФШ;
- возможность расположения буксировщика при буксировке лагом, как в носовой, так и в кормовой оконечности судна, поскольку упор буксировщика на переднем и заднем ходу одинаков;
- осуществление перемены хода без реверса двигателя;
- возможность создания упора в направлении, перпендикулярном борту швартующегося судна при любом положении буксировщика.
Хорошие маневренные качества судов с КД позволяют особо выгодно использовать эти движители на буксировщиках.
Судно, имеющее КД, способно легко разворачиваться в любом направлении даже из положения «Стоп». Наличие двух КД , позволяет судну двигаться лагом (со скоростью около 2 уз). Можно осуществлять плавное наращивание (практически от нуля) и гашение скорости. Это имеет важное значение при подходе к судам, причалам.
Путь торможения судна с КД обычно не превышает длины корпуса, так как выступающие лопасти движителя быстро гасят инерцию, существенно сокращается и время торможения.
Необходимо отметить и некоторые недостатки судов, оборудованных КД:
- суда, имеющие КД в качестве основного движителя, для плавания в открытом море не приспособлены, так как на волнении несущий диск и лопасти будут подвергаться чрезмерным напряжениям;
- для плавания во льду КД требует надежной конструктивной защиты;
- сложность конструкции самих КД и относительно большая масса позволяют применять их лишь при небольших мощностях нереверсивного двигателя;
- КД увеличивают фактическую осадку судна;
- Относительная дороговизна изготовления, эксплуатации и ремонта КД, связанная с тем, что для движителей правого и левого вращения нужно создавать правые и левые роторы и рычажные системы привода лопастей.
В 70-х годах этот недостаток устранен благодаря предложенной австрийской фирмой «Фойт» конструкции КД с рычажной системой привода лопастей, позволяющей использовать один и тот же ротор для правого и левого вращения.




Раздельно-управляемые поворотные насадки.Направляющая насадка на гребной винт впервые была предложена в 1887 г. русским ученым Ф. А. Бриксом. Цель ее применения — повышение скорости, тяговых характеристик и маневренных качеств судов. В основном насадки устанавливают на буксировщиках, толкачах, грузовых судах различного назначения (сухогрузы, танкеры и т.д.).
Так, в 1971 г в Японии построен крупнотоннажный танкер «Голар Ниху» дедвейтом 214 000 т. Пятилопастной винт этого судна имеет направляющею насадку диаметром 9,5 м и массой 68 т.
Наиболее типичной формой насадки является профилированное стальное кольцо, обращенное выпуклой поверхностью внутрь. Площади входного и выходного отверстии насадки неодинаковы, а гребной винт расположен в наиболее узком ее сечении.
Часто насадки делают поворотными, и они выполняют функции руля, причем в этом качестве насадка более эффективна, чем обычный руль.
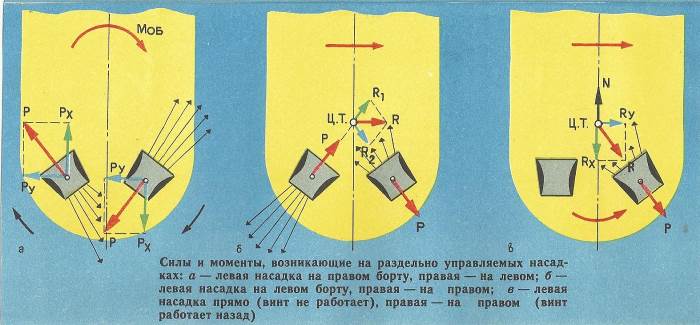
Раздельные поворотные насадки (РПН) на двухвинтовых судах при работе винтов враздрай развивают значительную боковую силу при отсутствии хода, т. е. обладают качествами, присущими САУ. При этом направление равнодействующей тяг комплексов и ее положение по длине судна зависят от того, как переложены насадки.
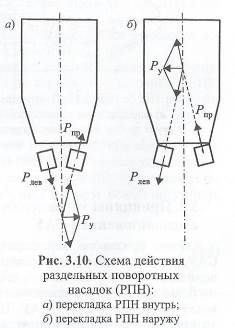
При перекладке обеих насадок внутрь, равнодействующая приложена в точке диаметральной плоскости за кормой судна, и последнее разворачивается на месте тем интенсивнее, чем больше углы перекладки насадок.
Когда обе насадки переложены наружу, равнодействующая перемещается соответственно в нос и в корму, судно не только дрейфует, но и поворачивается в сторону, зависящую от значения и направления упоров винтов. При некотором среднем угле перекладки точка приложения равнодействующей может совпасть с центром сопротивления воды при боковом движении судна. В этом случае оно дрейфует без вращения, т. е. движется лагом.
Итак, раздельная перекладка насадок при одновременном изменении значения упора винтов (посредством изменения частоты вращения двигателя) позволяет получить необходимое значение, точку приложения по длине судна и направление равнодействующей.
Раздельные поворотные насадки установлены на многих судах, главным образом речного флота буксирах-толкачах, сухогрузных и наливных судах. Испытания показывают высокую эффективность РПН, обеспечивающих судам повышенную маневренность.



Поворотные винтовые колонки (ПВК).Принципиально они не отличаются от ВДРК, но более просты по конструкции, так как у них нет механизма подъема и опускания. Нередко ПВК выполняют откидными, и в этом случае они напоминают обычный руль-мотор. Откидные ПВК применяют, например, на судах с подводными крыльями и на воздушной подушке — для обеспечения хода в водоизмещающем положении. Когда такие суда идут под основными движителями, колонки откидываются вверх. На упомянутых типах судов для тех же целей могут быть использованы и ВДРК.
Суммируя достоинства ВДРК и ПВК, можно отметить следующее:
- возможность создания упора практически в любом направлении;
- отсутствие необходимости реверсирования приводного двигателя;
- сравнительная простота конструкции, особенно ПВК;
- возможность регулирования суммарного упора при раздельном повороте двух колонок и по направлению, и по значению при постоянной частоте вращения винтов;
- способность судна двигаться лагом вследствие разворота колонок в противоположные направления под определенным углом.
Поворотные колонки имеют и недостатки:
- необходимость создания легких подвешенных механизмов препятствует использованию приводных двигателей больших мощностей;
- повышенные требования к зубчатым коническим редукторам в отношении прочности, надежности, плавности вращения удорожают конструкцию;
- выход ПВК, не имеющей устройства для откидывания, за габариты корпуса требует иногда конструктивной защиты от механических повреждений (защитные рамы, пилоны, фальшкили).
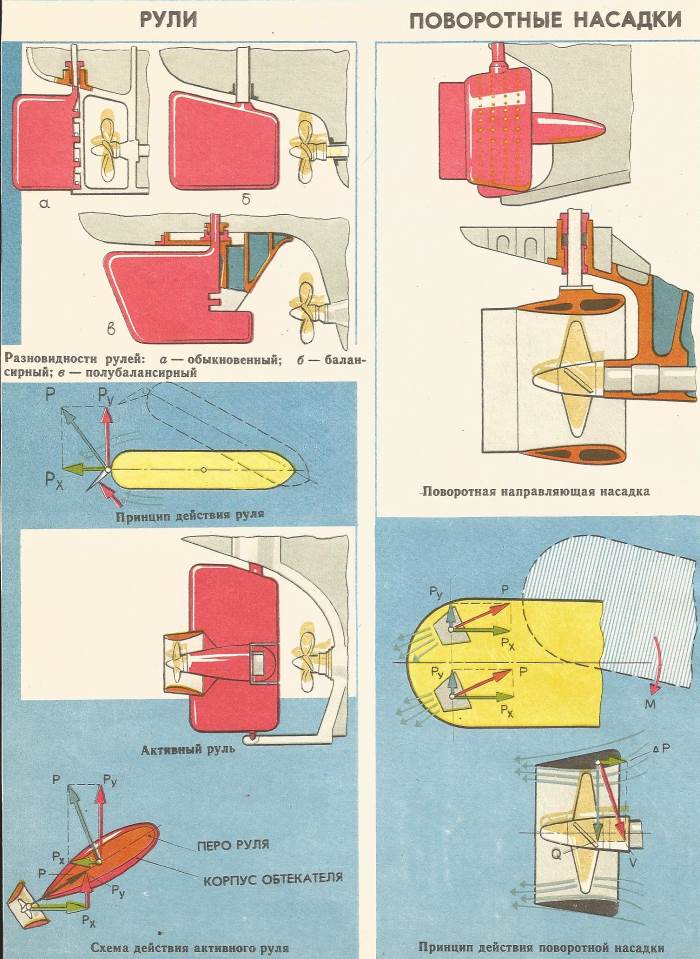
Активные рули (АР). Это рули с установленными на них вспомогательными винтами, расположенными обычно за задней кромкой пера. Винт, как правило, имеет направляющую насадку, которая повышает его к. п. д. и защищает от повреждений.
Энергия к винту может быть подведена двумя путями:
- от водопогружных электродвигателей, размещенных в бульбообразной наделке на пере руля;
- посредством конической зубчатой передачи и вертикального вала, проходящего через расточку баллера руля. В последнем случае, приводной двигатель располагается в румпельном отделении.
Винт активного руля устанавливают так, чтобы его ось находилась на одной линии с осью основного гребного винта. Активный руль перекладывается с борта на борт обычной рулевой машиной, но с целью увеличения эффективности действия угол перекладки должен быть не менее 70°. Когда судно следует под главным движителем (винт АР не работает) со скоростью более 5 узлов, перекладка руля осуществляется в обычных пределах — 35° на оба борта. Для этой цели на рулевых машинах устанавливают ограничители, сблокированные с датчиком, помещенным на гребном валу, или управляемые с мостика.
Из опыта эксплуатации активных рулей можно сделать некоторые выводы об их достоинствах. Так, активный руль:
- позволяет осуществлять повороты не только на малом ходу, но и при полном отсутствии хода;
- может служить запасным движителем, причем судно способно двигаться только с его помощью при полном сохранении управляемости;
- при маневрах на стесненной акватории используется как основной движитель;
- при совместной работе в результате противоположного вращения основного винта и винта АР снижаются потери на закручивание потока основного винта, что способствует увеличению пропульсивного к.п.д. всего комплекса;
- применение АР в сочетании сносовыми подруливающими устройствами позволяет обеспечивать движение судна лагом;
- маневренные качества судна еще более улучшаются, если в качестве движителя АР используется ВРШ.
Но при этом активные рули имеют недостатки:
- наличие АР усложняет конструкцию пера руля;
- поскольку АР не может быть убран в корпус, его механизмы постоянно нагружены в связи с вращением винта АР под действием набегающего потока, что значительно снижает надежность конструкции;
- в общем случае полное сопротивление судна вследствие применения активного руля вместо обычного может увеличиваться на 6 - 15%, этот недостаток можно немного компенсировать применением ВРШ;
- упор винта АР, как и всякого винта фиксированного шага, на заднем ходу меньше упора на переднем ходу, этот недостаток в известной мере может быть устранен применением ВРШ.
Подруливающие устройства. Это средства активного управления, создающие упор в направлении, перпендикулярном ДП судна, независимо от работы главных движителей и руля (насадки). Необходимость эффективного управления носовой частью судна привела к оборудованию судов подруливающими устройствами. Иногда ПУ устанавливают и в кормовой части судна, что улучшает его маневренность. Но ввиду технических трудностей размещения ПУ в корме суда чаще всего оборудуют таким устройством только в носовой части.
Главной задачей ПУ является уравновешивание совместно с основным движительно-рулевым комплексом внешних сил, действующих на судно: ветра, течения и волн.
Подруливающие устройства должны:
- обеспечивать достаточную управляемость при небольших скоростях и отсутствии хода;
- зависеть по возможности в меньшей степени от глубины погружения, крена и дифферента судна;
- не снижать свою эффективность на волнении;
- допускать эксплуатацию на мелководье;
- обеспечивать быстрое и плавное изменение величины упора, а если необходимо, то и его направления;
- иметь защиту от повреждений плавающими предметами;
- выполнять функции вспомогательного движителя;
- управляться дистанционно с одного или нескольких постов;
- не вызывать вибраций и шума;
- быть прочными, надежными, отличаться простотой монтажа и ремонта.
Подруливающие устройства подразделяются на подруливающие устройства туннельного типа и выдвижные винтовые колонки различных типов.
С целью оценки эффективности ПУ в качестве расчетного маневра принято, например, считать самостоятельную швартовку судна на стесненной акватории при ветре заданной силы. Швартовка при этом делится на 3 маневра, которые можно оценить количественно:
- На предельно малом ходу, но не теряя управляемости, судно должно входить в порт и после выполнения соответствующего маневрирования подойти к причалу.
- Вблизи причала, совершив разворот, судно должно занять определенное положение по отношению к причалу.
- В течение некоторого времени, достаточного для подачи швартовных концов, судно должно удерживаться в этом положении без хода и дрейфа.
Каждый из рассмотренных маневров может иметь и самостоятельное значение. Таким образом, принятие перечисленных маневров в качестве основных для оценки эффективности ПУ представляется целесообразным всегда, когда требования к ПУ конкретно не сформулированы заказчиком.
Подруливающие устройства ПУ классифицируют по ряду признаков:
- по типу рабочего органа — с гребными винтами, насосами различных систем, крыльчатами движителями;
- по типу канала, в котором расположен рабочий орган, — с прямым каналом, с изогнутым каналом (S-, Т-, П-, К-, и Z-образным)
- по расположению на судне: носовые (НПУ), кормовые (КПУ);
- по типу приводного двигателя — с приводом от двигателя внутреннего сгорания (ДВС), паровых и газовых турбин, электродвигателей.
В ПУ с гребными винтами, последние обычно расположены в поперечном цилиндрическом туннеле, идущем от борта до борта ниже ватерлинии. Движителями служат один или два ВФШ либо один ВРШ. Для повышения эффективности ПУ входные кромки туннеля закруглены. На входных отверстиях устанавливают защитные решетки.
В схеме с одиночным ВФШ значением и направлением упора управляют изменением частоты и направления вращения приводного двигателя. При этом трудно достичь одинаковых значений упора на оба борта. Этот недостаток частично устраняют, применяя в ПУ два соосных ВФШ противоположного вращения, расположенных симметрично относительно ДП судна. Эффективность двухвинтового ПУ в сравнении с ПУ, имеющим один ВФШ, выше на 10 - 15% (вследствие уменьшения потерь на закручивание струи).
В ПУ с ВРШ обеспечивается плавное изменение упора от нуля до максимума при постоянной частоте вращения винта.
На пассажирском судне проекта 302 применяется подруливающие устройство туннельного типа, с винтом регулируемого шага (ВРШ). Основное назначение этого устройства – выполнение швартовых операций. Так как судно эксплуатируется в особых условиях плавания, конструкция туннельного типа САУ более надёжна, так как движитель защищён от повреждений. Мощность этого типа САУ позволяет развить значительный боковой упор, а винт регулируемого шага создаёт точно регулируемый эффект, что повышает управляемость судна. Технические характеристики подруливающего устройства приведены в таблице 3.
Таблица 3 – Технические характеристики подруливающего устройства судна проекта 302
| Марка | Мощность, кВт | Диаметр винта, мм | Тяга, кН |
| Шоттел | 370 кВт |
Выдвижные движительно-рулевые колонки (ВДРК).Это устройство, способное поворачиваться в горизонтальной плоскости на угол до 360°, обеспечивая таким образом широкий выбор направления упора. Это позволяет судну под действием ВДРК двигаться передним и задним ходом, а также создавать упор на оба борта без реверсирования приводного двигателя.
Винт ВДРК может быть «толкающим» или «тянущим». Однако, как показывают испытания моделей, в первом случае момент, скручивающий баллер, в 6 – 7 раз меньше. Поэтому в ВДРК устанавливаются исключительно «толкающие» винты, т. е. винт по отношению кнабегающему потоку расположен за гондолой.
Судно, оборудованное двумя ВДРК в корме и ПУ в носовой части, обладает очень хорошей управляемостью, включая возможность движения лагом, повороты на месте. Вырезы в обшивке, через которые ВДРК опускаются в воду, в ходовом режиме, когда колонки подняты вверх и не работают, закрываются заслонкой или створками.
Выдвижная движительно-рулевая колонка может служить как основным движителем, так и вспомогательным движительно-рулевым устройством судна. В качестве основного движителя ВДРК применяют на судах, которые должны обладать высокими маневренными качествами при относительно небольшой скорости (плавкраны, паромы, портовые буксиры, пожарные и промысловые суда).
Как вспомогательное движительно-рулевое устройство ВДРК в основном используют на судах, которым по роду деятельности необходимо длительное время удерживаться на месте в открытом море (океанографические суда, плавбазы, кабеле- и трубоукладчики, плавучие буровые). В данном случае ВДРК является подруливающим устройством навесного типа.
Две ВДРК, установленные на судне, могут поворачиваться и синхронно, и раздельно.
Многоперьевые рулевые комплексыотличаются от обычных тем, что в систему рулей расположенных по оси гребных валов добавлены дополнительные перья рулей расположенные между осями гребных валов. Все рули соединены эксцентрической системой привода и вращаясь синхронно имеют различные углы перекладки. Это позволяет располагать их в положении «Прямо» параллельно друг друга и ДП судна, а в положении «На борт» образовывать за движителями судна экран направляющий отбрасываемую движителями струю перпендикулярно ДП в сторону перекладки рулей. При этом судно не имеет продольного упора, но имеет поперечный упор, величина которого зависит от интенсивности работы движителей судна. Такие рулевые системы (распространена система Энкеля) позволяют при работе движителей (даже одного среднего) на передний ход выполнять циркуляцию практически на месте, и оперативно перекладкой рулей на борт получать эффект кормовогоподруливающего устройства с большим упором. Для улучшения управляемости на заднем ходу используют рули заднего хода – фланкирующие рули, которые устанавливают впереди гребных винтов. Движительно- рулевой комплекс может включать рулевую систему Энкеля и фланкирующие рули, что обеспечит судну хорошие маневренные качества.
- Силы и моменты действующие на судно при работе подруливающих устройств, активных рулей и рулей Энкеля.
Сила подруливающего устройства создается за счет реакции струи воды, отбрасываемой движителем (насосом, винтом и т.п.). Если струя отбрасывается на правый борт – сила упора РП направлена на левый борт, и наоборот. Величина упора определяется выражением: РП = ρ Q υ где: ρ –массовая плотность воды; Q-производительность движителя; υ-скорость выхода воды из трубы ПУ. Поскольку тяга ПУ, как правило, направлена перпендикулярно к ДП судна, движение судна (при отсутствии ветра и течения) под действием только ПУ, сводится к вращению судна. Однако это вращение неизбежно сопровождается перемещением судна в сторону оконечности, на которой находится ПУ, т.е. вращение на месте невозможно. Сила упора ПУ приложена в оконечности судна, тогда центр поворота располагается между ц.т. G и противоположной оконечностью судна. При этом ц.т. G будет иметь окружную скорость и, следовательно, на судно будет действовать центробежная сила с, направленная в сторону ПУ и вызывающая смещение судна, которое может быть нейтрализовано работой движителей судна.
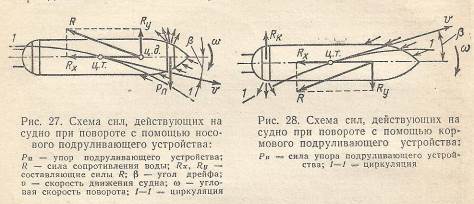
Если на судне двигающемся вперед включить носовое ПУ, то под действием силы РП возникает дрейф носа судна в сторону поворота.
Наличие дрейфа приводит к появлению угла дрейфа, поток воды, первоначально набегавший параллельно ДП, начинает набегать на внутренний (относительно поворота) борт, от чего возникает сила бокового сопротивления Rу, приложенная ближе к носу от ц.т. судна и направленная противоположно дрейфу. Общий поворачивающий момент будет состоять их 3-х моментов Моб = Мрп – МRу – МД где: Мрп – момент упора ПУ; МRу – позиционный момент сопротивления движению; МД –демпфирующий момент сопротивления вращению.
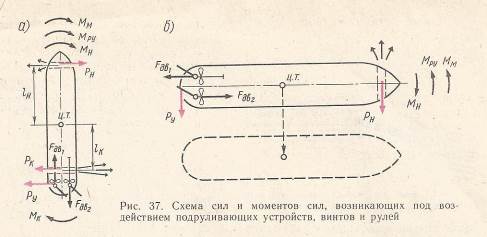
Если на том же судне имеется кормовое подруливающее ПУ, то приего включении возникает дрейф кормы судна в сторону противоположную повороту судна, поток воды начинает набегать на борт, внешний относительно поворота, а схема сил и моментов будет анологична возникающей при перекладке руля. М1об = Мрк + Мру - МД где Мрк – момент упора кормового ПУ.
Сравнивая вышеприведенные уравнения видим, что при условии равенства поворачивающих моментов носового и кормового ПУ М1об > Моб , т.к. позиционный момент при работе кормового ПУ способствует повороту, а при носового ПУ – препятствует ему. Поэтому при движении передним ходом целесообразно применять при маневрировании кормовое ПУ, а на заднем ходу - носовое ПУ.
При наличии на судне носового и кормового ПУ, для движения судналагом достаточно включить оба ПУ на один борт, а для выполненияоборота на месте – на разные борта. Скорость движения лагом 0,3 - 0,4 м/с, угловая скорость поворота 4 – 50/мин.
С увеличением скорости движения ПУ становится малоэффективным, т.к. направление отбрасываемой им струи отклоняется от нормального по отношению к ДП судна, отчего сила упора резко уменьшается. Поэтому их следует применять при производстве маневров на малых скоростях.
Движение судна лагом и оборот на месте можно выполнять и с одним носовым ПУ, используя движители и рули. Для выполнения движения лагом вправо нужно включить носовое ПУ на правый борт, левый движитель на задний ход, правый – на передний, а рули переложить влево на угол 15-200 (рис. 37б) Если сумма моментов относительно ц.т. судна от движителей Мм и руля Мру, создающая поворот влево, будет равна моменту от ПУ Мн, создающего упор вправо, то судно разворачиваться не будет и за счет сил Ру и Рн будет двигаться лагом. Для разворота на месте носовое ПУ нужно включить в сторону поворота, движители враздрай (внешний вперед, внутренний –назад) и рули переложить в сторону поворота.
Тогда Моб = Мм + Мру + Мн.
Система рулей Энкеля, при перекладке рулей на борт, направляет упор движителей перпендикулярно ДП судна и направленный в сторону противоположную перекладки рулей. При этом судно перестает иметь упор движения, но имеет большой упор поворота. Уменьшением угла перекладки основных рулей в пределах 35-420 можно варьировать величинами бортового и продольного упора. Таким образом судно при работе главных движителей может создавать эффект работы кормового ПУ, сила упора которого зависит от интенсивности работы движителей на передний ход. В сочетании с носовым ПУ, использование рулей Энкеля позволяет выполнять движение судна лагом, удерживать судно бортом к ветру не имея дрейфа, производить оборот на месте. Судно имеет очень хорошую управляемость, но на установившемся движении вперед не следует перекладывать рули более 20-250.
Активный руль (АР) создавая дополнительный упор работой своего движителя, значительно увеличивает поворачивающий момент в соответствие с перекладкой руля. АР, для повышения эффективности перекладывается до 70 – 900 и позволяет разворачивать судно при отсутствии хода, а так же выполнять маневры без работы главных движителей на стесненной акватории в т.ч. движение малой скоростью. Его использование совместно с работой движителей и ПУ позволяет выполнять как движение судна лагом, так и разворот сунна на месте. АР является частным случаем поворотной винтовой колонки (ПВК).Эффект направленного упора используется в поворотных насадках и винто-рулевых колонках.
- Силы и моменты действующие на судно при работе раздельно управляемых насадок и винто-рулевых колонок.
Раздельные поворотные насадки по своей форме не отличаются от обычных ПН, они устанавливаются на двухвинтовых судах и имеют конструкцию привода позволяющую выполнять их совместную и раздельную перекладку. РПН при работе движителей враздрай позволяют создавать значительный боковой упор при отсутствии хода. Если насадки переложить внутрь (рис.а; левая- вправо, движитель – вперед; правая- влево, движитель - назад) , то равнодействующая упора винтов, приложенная за кормой, создает большой момент и судно совершает быстрый поворот на месте. Моб = Ру(0,5L) + Рхb + Ру(0.5L) + Рхb = РуL + 2Рхb
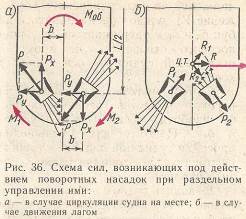
При перекладке насадок наружу (рис.б; левая – влево, движитель – вперед; правая – вправо, движитель - назад). Продлим линии сил упора Р насадок до пересечения их с ДП судна, точка приложения равнодействующих упора смещается вперед от насадок. В зависимости от угла поворота насадок точка приложения упора может находиться впереди или позади миделя, создавая соответствующий поворачивающий момент. При ее положении на миделе создается боковой упорсмещающий судно лагом. Это качество особенно необходимо толкачам при их сцеплении с составами. На судах с РУПН возможны и другие варианты маневрирования посредством винтов и насадок рассмотренные ранее, а так же их использование с носовым ПУ, что значительно улучшает их маневренность.
Поворотные винтовые колонки представляют собой гребной винт, в т.ч. в комплексе с насадкой, направление упора которого может меняться на 3600, за счет поворота вокруг вертикальной оси. ПВК могут быть главными (ГДРУ) или вспомогательными (ВДРУ)движителями. Как ГДРУ, ПВК применяются на судах требующих большей управляемости, но не нуждающихся в большой скорости: плавкраны, портовые буксиры и т.п. В качестве ВДРУ ПВК применяют на судах длительное время удерживаемых на постоянном курсе или в заданной точке: научно-исследовательские суда, буровые платформы, кабелеукладчики и т.п. Суда с ПВК обладают исключительной маневренностью, компактной силовой установкой и получают все более широкое использование.
Дата добавления: 2016-02-04; просмотров: 42822;