Управляемость двух и трех винтовых судов.
Большинство судов внутреннего плавания имеют двух и трех вальные ДРК, обеспечивающие им хорошую управляемость и маневренность.
На двухвинтовых судах отрицательное влияние на управляемость тангенциальных составляющих гидродинамического давления струи от работы винта и гидростатического давления воды на лопасти винта устраняются путем установки винтов разного вращения (шага). Сочетание винтов может быть «наружного вращения» ( правый – правого шага, левый левого шага) и «внутреннего вращения» (правый – левого шага, левый – правого шага). Физическая сущность влияния двух гребных винтов на судно в сущности такая-же как и одного винта, но смещение осей гребных валов относительно ДП судна дают ему значительные преимущества при маневрировании. Оба варианта при одновременной работе винтов на передний и задний ход равноценны. Однако при работе «враздрай» маневренные качества двухвинтовых судов с внутренним вращением винтов несколько отличаются от маневренности судов с внешним вращением винтов. Чаще на судах применяют наружное вращение винтов с расположением перьев рулей по оси гребных валов, а в некоторых случаях устанавливают дополнительное перо руля по ДП.
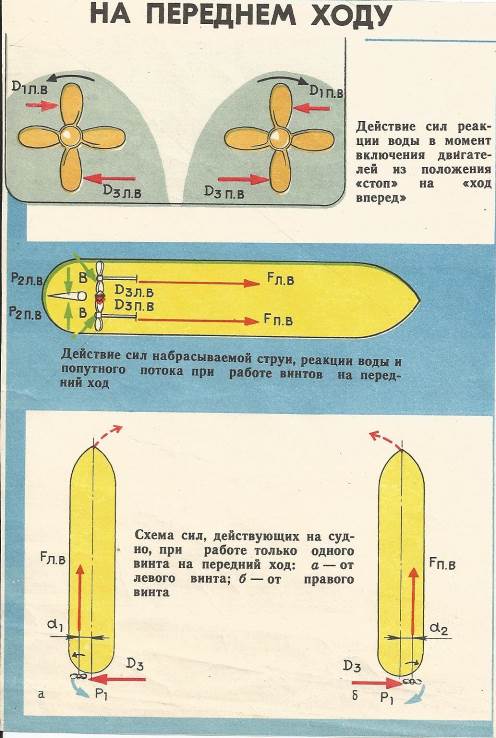
При одновременной работе двух винтов наружного вращения на переднем ходу гидростатические силы D1 и D3 правого и левого винта, гидродинамические силы Р2 и Р4 на правом и левом руле и действие попутного потока справа и слева соответственно уравновешиваются. Вследствие этого двухвинтовое судно при движении передним ходом с одинаковой частотой вращения винтов и положением рулей «Прямо», движется прямолинейно, не испытывая отрицательного влияния винтов на управляемость.
Аналогичная картина наблюдается при движении судна задним ходом, при работе двух винтов «Назад» с равным числом оборотов и положении рулей «Прямо».
Если на судне с наружным вращением винтов не имея движения относительно воды, при положении рулей «Прямо», левый движитель будет пущен «вперед», то под действием гидростатической силы D3, корма судна, в момент начала работы винта, уклонится влево, а носовая часть вправо. При установившемся движении двухвинтового судна на переднем ходу и работе левого винта, независимо от шага винта в положении руля «Прямо», судно будет уклоняться вправо по ходу движения. Это вызвано тем,что упор винта и направление его движущей силы Fл.в смещены от ДП вправо на некоторое расстояние а1 и сила Fл.в образует относительно Ц.Т. судна поворачивающий момент Млв наз. момент движущей силы винта. Чем больше расстояние а1 (между осью гребного вала и ДП), плечо момента, тем больше значение момента вызывающего отклонение судна. Судно стремится отклониться в сторону неработающего винта, циркуляцию следует выполнять в сторону неработающего винта.
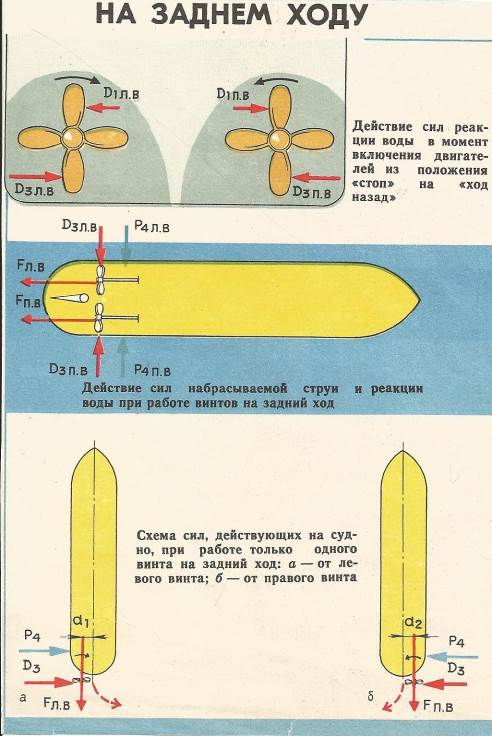
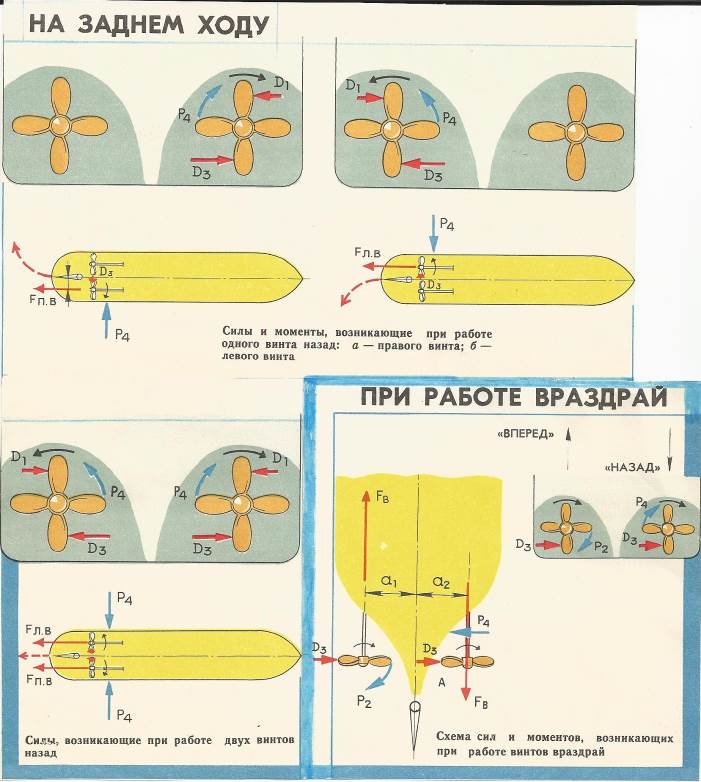
При работе двухвинтового судна, с наружным вращением винтов, правым движителем «назад», в момент включения винта гидростатическая сила D3 и гидродинамическая сила Р4 начнут смещать корму судна влево ( в сторону противоположную шагу винта), одновременно судно начинает двигаться назад и резче уклоняться кормой влево. В этом случае влияние винта на смещение кормы настолько велико, что перекладкой руля порой невозможно приостановить вращательное движение судна. Поэтому при маневрировании одним винтом на заднем ходу необходимо своевременно принимать меры предосторожности и использовать совместную работу двух винтов и рулей.
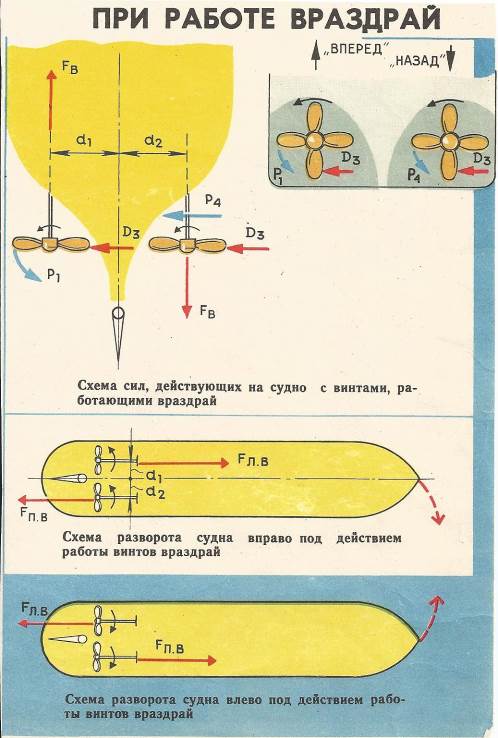
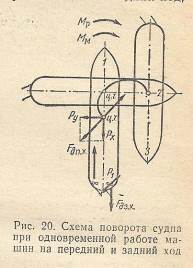
Когда левый винт работает «вперед», а правый «назад» - работа «враздрай», от работы винтов в противоположном направлении возникают движущие силы Fл.в и Fп.в – пара сил с плечом а1+а2 . Момент этой пары сил (момент машин) Мм направлен по часовой стрелке. При работе движителей враздрай и перекладке рулей в сторону винта работающего на задний ход, образуется мощный поворачивающий момент равный сумме: момента движущих сил винтов Мм, момента руля Мру, момента гидродинамических сил винта работающего на задний ход Мв и момента гидростатических сил МD. Под действием суммы моментов Моб = Мм + Мру + Мв + МD судно получает вращательное движение и разворачивается в правую сторону практически на одном месте. При этом значение угловой скорости можно регулировать углом перекладки рулей и изменением частоты вращения движителей. В случае необходимости можно наряду с вращательным движением, обеспечить и поступательное движение судна, а при благоприятных метеоусловиях и движение судна лагом.
При винтах с внутренним вращением, если выполняется тот же маневр, благоприятное действие гидродинамического давления тангенциальной составляющей струи на корпус судна от винта работающего назад ухудшится, а гидростатическое давление на лопасти обоих винтов будет препятствовать повороту. Следовательно общий поворачивающий момент, при прочих равных условиях будет меньше. Судно с наружным вращением винтов, при работе «враздрай,» имеет лучшую поворотливость, чем судно с внутренним вращением винтов. Преимущество внутреннего вращения винтов в некотором увеличении силы упора винтов и уменьшении скорости кильватерной струи.
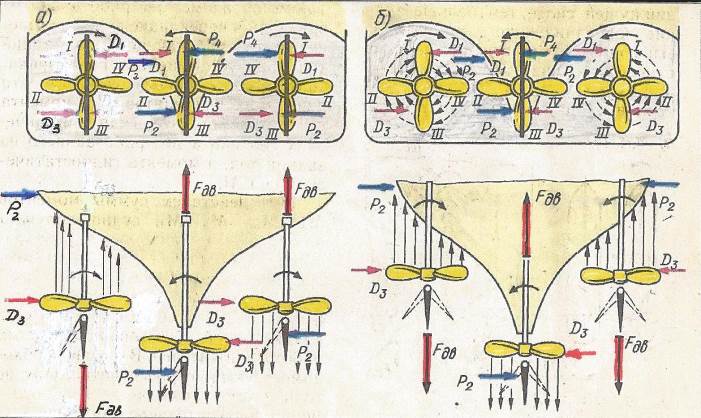
На трех вальных судах бортовые винты обычно внешнего вращения, а средний винт правого или левого шага.

Рассмотрим вариант со средним винтом левого шага изображенного ниже.
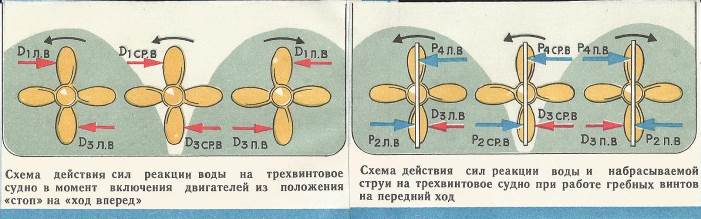
Как видим из приведенного рисунка, при работе трех винтов на передний ход, поворачивающие моменты бортовых винтов, вращающихся в противоположные стороны, взаимно уравновешиваются. Рассмотрим силы, возникающие от вращения среднего винта, расположенного позади бортовых винтов. Лопасти среднего винта при прохождении нижней точки, встречают сильную струю от правого винта (правого шага) направленную противоположно вращению винта левого шага. Гидростатическая сила D3ср.в значительно больше суммы гидростатических сил D1л.в. и D3 п.в.. Вследствие разности этих сил корма судна отклоняется в направлении соответствующему шагу среднего винта, т.е. влево. Тангенциальные составляющие гидродинамического давления Р на среднее перо руля, от воздействия струй бортовых винтов, выравниваются, т.е. с левой и правой стороны они приблизительно равны. Поэтому при работе трех винтов на передний ход возникает поворачивающий момент вправо. Диаметр циркуляции трех винтового судна с наружным вращением бортовых винтов меньше при повороте в сторону противоположную шагу среднего винта.
При остановленных бортовых движителях поворот судна будет лучше в сторону, соответствующую шагу среднего винта. При работе только бортовых движителей поворотливость в одну и другую стороны – одинакова.
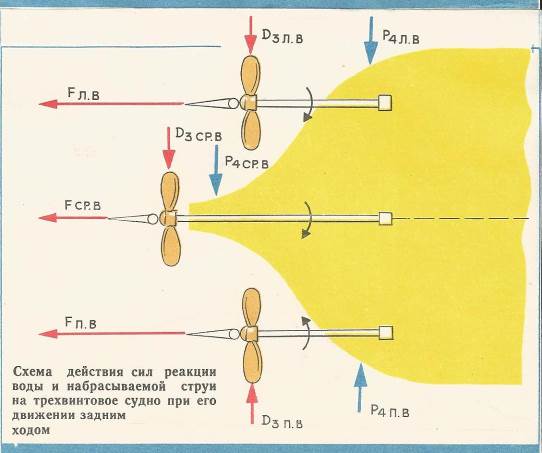
Очень важным является расположение среднего ДРК, так при нахождении среднего винта позади бортовых, при работе последних на задний ход, отбрасываемые ими струи воды не влияют на работу среднего ДРК, т.е. не оказывают влияния на поворачивающий момент создаваемый им.
Это позволяет сохранять положительную управляемость переднего хода судна при работе бортовых движителей «назад» до начала активного поступательного движения судна назад. Что очень важно при выполнении сложных маневров без поступательного движения судна и его торможении. Наличие трех винтов на судне позволяет применять работу движителей «враздрай» в различных комбинациях, что обеспечивает его высокие маневренные качества.
На управляемость винтовых судов, кроме перечисленных выше сил, существенное влияние оказывают боковые силы Ту винтов, возникающиеот косого натекания на винт потока воды. Эти силы в основном зависят от числа оборотов, характеристик винта и угла натекания на винт потока воды, чем больше оборотов винта и больше угол натекающего потока относительно ДП судна, тем больше боковые силы винта. Косое натекание потока на винт наблюдается при выполнении циркуляции, дрейфе от ветра и т.п. Боковые силы направлены в сторону борта противоположного набегающему потоку.
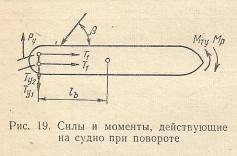
Боковые силы двух винтов Ту1 и Ту2, вызванные косым натеканием потока под углом β при выполнении поворота вправо на переднем ходу. Косое натекание на винты потока вызвано появлением дрейфа. Поворачивающий момент от этих сил МТУ направлен в сторону противоположную повороту, т.е. винты оказывают стабилизирующее действие на курс судна.
МТУ = ТУ Lb где Lb – расстояние от винта до ц.т. судна.
У двух и трех винтовых судов сила Ту со стороны борта, на который на который набегает поток воды, больше, чем у винта противоположного борта, так как этот винт экранируется корпусом и угол скоса на него меньше. При ветровом дрейфе сила Ту всегда направлена в сторону, противоположную дрейфу.
После остановки винтов и уменьшения скорости хода судно, движущееся по инерции, практически перестает слушаться руля, т.е. теряет управляемость. При работе движителей на задний ход у судна, движущегося вперед по инерции, потеря управляемости наступает раньше при несколько большей скорости. Это свойство сильно осложняет выполнение маневров по остановке судна в определенном месте.
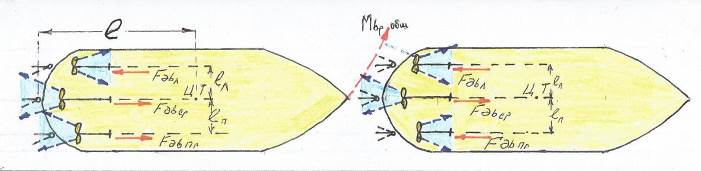
Этот недостаток у двух и более винтовых судов может быть устранен работой движителей «враздрай». Для сохранения прямолинейного движения надо чтобы поворачивающий момент движителей Мм , был равен поворачивающему моменту руля Мр,, направленному в противоположную сторону, т.е. Мм = Мр или Мм = Fд(ср) b1 = Р1 L/2cosα,где Fд(ср) осредненный упор работающих движителей; b1- расстояние между осями гребных валов. Для прекращения движения вперед необходимо чтобы
FДП.Х ≤ FДЗ.Х + Рх.
Водометный движитель, являясь гидрореактивным, создает силу упора вследствие реакции потока воды выбрасываемого из выходного отверстия водометной трубы – сопла. Его преимуществом является возможность использования на мелкосидящих судах в т.ч. в граничном (гидро-аэро) положении. В большинстве случаев водометные движители устанавливают в сочетании с рулевым комплексом, которым обеспечивается управление и реверсирование, посредством изменения направления выброса воды. Они имеют короткий тормозной путь и хорошую управляемость на заднем ходу, за исключением судов с коробчатыми рулями и дефлекторами.
По тематике данной лекции проводится 4-х часовое практическое занятие №2.3
Дата добавления: 2016-02-04; просмотров: 5386;