ВЛИЯНИЕ РАБОТЫ КОМПЛЕКСА «РУЛЬ-ВИНТ» НА УПРАВЛЯЕМОСТЬ ОДНОВИНТОВОГО СУДНА
Целью лекции являются рассмотрение влияния совместной работы руля и винта на управляемость судна.
1. Действие гребного винта на руль и корпус судна.
Основное назначение гребного винта, установленного на судне, заключается в создании силы тяги (Р - упор) для поступательного движения судна. Вместе о тем, отбрасываемые при работе винта, потоки воды, действуя на руль и корпус судна оказывают влияние на его управляемость. Это влияние сказывается на переходных режимах: с переднего на задний ход и с заднего на передний ход. Поэтому действия, оказываемое винтом на управляемость, необходимо учитывать при маневрировании судна.
В зависимости от положения лопастей бывают гребные винты правого и левого вращения (правого и левого шага)
Винт правого вращения на переднем ходу вращения по часовой стрелке, если смотреть по направлению движения судна (и наоборот).
Шаг винта - это расстояние на которое продвинулся бы винт за один оборот при вращении в каком-либо твердом теле.
Морские суда в большинстве имеют один винт правого шага, поэтому рассмотрим его влияние на управляемость.
Сложный процесс взаимодействия винта с рулем и корпусом пока полностью теоретически не описан, поэтому количественную оценку влияния различных сил на управляемость судна дать нельзя. В литературе по управлению судном обычно рассматривается качественная сторона этого вопроса, на ней мы и остановимся.
Обратимся к 4-х лопастному винту правого шага, вращающемуся на переднем ходу. Движение винтовой струи показано на рис. 3.1. В то же время за кормой судна образуется попутный поток, действующий на лопасти винта и руль.

Рис. 3.1. Движение винтовой струи.
Попутным потоком называют движение воды, которая устремляется в пространство, освобождаемое судном при движении его вперед, и увлекаемое за судном силами трения.
Попутный поток уменьшает скорость натекания встречной воды на руль, т.е. ухудшает управляемость. Воздействие попутного потока на винт выражается в уклонении кормы в ту или иную сторону в зависимости от режима движения судна. Левая лопасть I винта встречает попутный поток, вследствие чего испытывает большее давление, чем правая лопасть II, уходящая от потока (рис. 3.2.). Поэтому корма судна на переднем ходу под действием силы попутного потока уклоняется влево (сила в больше силы в1).
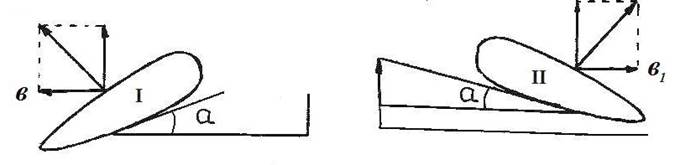
Рис. 3.2. Положение лопастей, показывающее разность давления попутного потока.
Гребной винт закручивает прилегающие массы воды, создавая вихревой спиралеобразный поток, идущий от винта назад. Этот поток набегает на руль справа в нижней части и слева в верхней части. Из-за неравномерности распределения скоростей в потоке струи в нижней части руля появляется избыточное давление. В результате появляется боковая сила С - сила набрасываемой струи, отклоняющая корму влево, а нос вправо.
Вращению лопастей винта противодействует вода, это сопротивление называют силой реакции Д.
Рассмотрим действие силы реакции на примере 4-х лопастного винта (рис. 3.3).
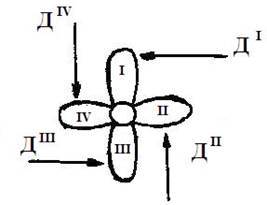
Рис. 3.3. Действие сил реакции.
Движению лопасти I противодействует сила ДI, стремящаяся повернуть корму влево.
Реакция ДII стремится поднять корму вверх, а на уклонение ее в сторону.
Сила реакции ДIII стремится уклонить корму вправо, ДIV действует вниз.
Сила ДIII>ДI т.к. на глубине больше гидростатическое давление, следовательно корма пойдет вправо,
Силы ДIIи ДIV создают вибрацию кормы при некоторых «так называемых» критических оборотах.
При движении судна вперед за счет трения воды о корпус и образования за кормой разреженного пространства возникает попутное течение (поток). Давление попутного потока на симметричные обводы корпуса судна не вызывает уклонения кормы.
Угол натекания воды на лопасти винта не одинаков и определяется окружной и осевой скоростью винта.
Наибольшая скорость натекания (попутного потока) у ватерлинии, т.к. угол встречи лопасти с водой в верхнем положении больше, чем в нижнем, создается боковая сила разности сопротивления воды, уклоняющую корму влево.
В начале движения попутный поток отсутствует.
На заднем ходу сила набрасываемой струи действует на раковину правого борта вверху под большим углом и отклоняет корму влево.
На переднем установившемся ходу сумма сил С+в больше силы Д, поэтому корма судна уклоняется влево.
Силы, возникающие при отклонении руля.
Если в момент дачи хода руль отклонить от ДП, то потоки воды отбрасываемые винтом назад окажут давление на него - появляется сила винтовой струи – Свс. Она отклоняет корму в сторону противоположную кладке руля, т.е. помогает рулевой силе.
На заднем ходу появляется сила всасываемой струи В - эта сила помогает рулевой силе уклонять судно в нужную сторону.
Силы, действующие на руль от встречного потока воды за счет движения судна: Ру - рулевая сила на переднем ходу, Ру' - на заднем ходу значительно больше по величине всех других сил.
2. Взаимодействие сил при работе комплекса "руль - винт" на различных режимах движения судна.
Рассмотрим работу комплекса "руль-винт" идя одновинтового судна (винт правого шага).
I. Судно не имеет хода, винт работает вперед (рис. 3.4.). При расположении руля в ДП, возникают всего две силы: набрасываемой струи С и реакции Д. Причем Д>С. Складывая эти силы с силой Pe, получим R равнодействующую, которая уклоняет корму вправо.
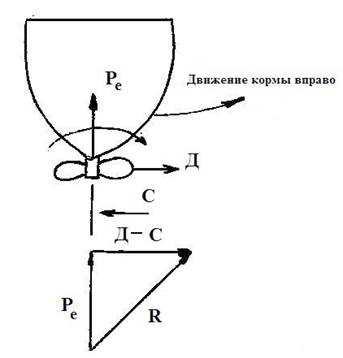
Рис. 3.4. Взаимодействие сил при режиме 1.
Если руль положить вправо, то сила винтовой струи Cc будет противодействовать (Д - С), и корма будет на месте или пойдет влево.
Если руль положить влево, то сила Сс будет способствовать силе Д по уклонению кормы вправо.
2. Судно движется вперед, винт работает вперед (рис. 3.5.). На установившемся переднем ходу, когда руль прямо, на судно, кроме Ре действуют силы Д, С, и в. При этом сумма сил С+в уклоняют корму влево, т.к. С+в>Д . R направлена влево. Поэтому, чтобы вести судно по курсу, руль слегка отводят влево, тогда корма должна идти вправо. Добиться равенства сил С+в=Д+∆Ру+Сс трудно, поэтому судно идет по ломаной линии, форма которой зависит от рулевого устройства и навыка рулевого матроса. В приведенном последнем равенстве слагаемое в правой части ΔРу – есть рулевая сила, зависящая от скорости судна и угла перекладки руля.
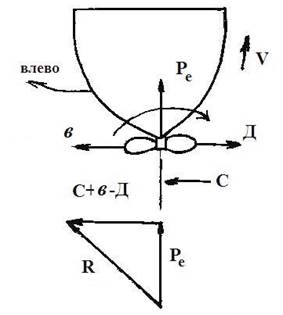
Рис. 3.5. Взаимодействие сил при режиме 2.
При перекладке руля вправо силы Ру и Сс действуют на корму совместно и силами С и в. Корма идет влево под действием 4-х сил, поэтому циркуляция в правую сторону у судов с одним винтом правого шага выполняется быстрее, чем в левую.
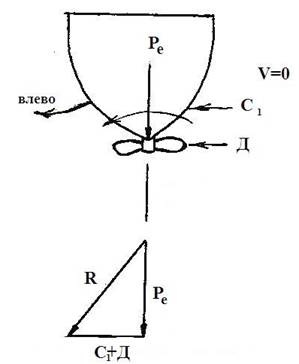
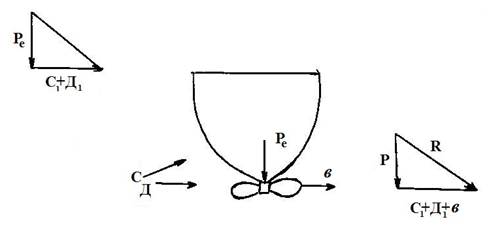
Рис. 3.6. Взаимодействие сил при режиме 3.
3. Судно не имеет хода, винт работает назад. Сида набрасываемой струи С, и реакция Д, действуют совместно и при руле прямо отклоняют корму влево. Сила всасываемой струи В на руль в прямом положении не действует. Если положить руль влево, то в увеличивает сумму сил СI + ДI, если вправо, то уменьшает.
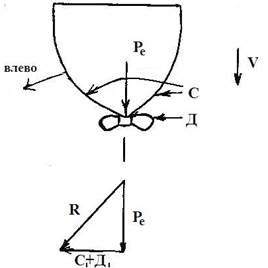
Рис. 3.7. Взаимодействие сил при режиме 4.
4. Судно движется назад, винт работает назад (рис. 3.7.). В дополнение к силам CI и ДI на заднем ходу появляется сила Ру' – рулевая сила на переложенный руль, при положении руля прямо она не действует на уклонение судна.
В случае перекладки руля вправо сила Ру' противодействует силам CI и ДI и при большой скорости движения может уваливать корму вправо. Если руль положить влево, то все три силы С, Д и Ру' действуют в одну сторону и уклоняют корму влево.
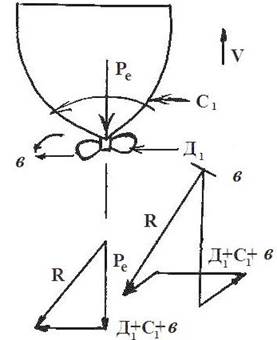
Рис. 3.8. Взаимодействие сил при режиме 5.
5. Судно движется вперед, винт работает назад (рис. 3.8.). В начальный момент, когда винт остановлен исчезают силы Д и С, сила в будет уклонять корму влево. При работе винта назад появятся силы ДI и СI, уклоняющие также корму влево. При руле положенном влево и движении вперед сила Ру может компенсировать действие сил ДI + CI + в, а также ж силы В - всасываемой струи.

Рис. 3.9. Взаимодействие сил при режиме 6.
6. Судно движется назад, винт работает вперед (рис. 3.9.). С началом вращения винта вперед появится большая сила реакции Д и сравнительно меньшая сила набрасывающей струи С, т.к. руль уходит от ее влияния, корма будет отклоняться вправо.
Если отвести руль вправо, то появится сила Ру' и С C противодействующие друг другу. При значительной скорости силы (Д - С ) и Ру' отклоняет корму вправо, при малой скорости и полном ходе может быть наоборот, т.е. корма пойдет влево. При руле положенном влево, корма должна идти влево, т.к. силы ( Д - С ) и СС менее Ру'. Основные выводы показаны в таблице 3.1.
Таблица 3.1.
| Характер движения судна режим работы винта | Полож. руля | Действующие силы | Уклонение кормы |
| Начало движения вперед. Винт работает вперед | прямо | Д>С | вправо |
| Установившийся передний ход. Винт работает вперед | прямо | С+В>Д | влево |
| Установившийся передний ход. Винт работает назад | прямо | СI+ДI+В>0 | влево |
| Начало движения назад. Винт работает назад | прямо | СI+ДI>0 | |
| Установившийся задний ход. Винт работает назад | прямо | СI+ДI>0 | влево |
| Установившийся задний ход. Винт работает вперед | прямо | Д>С | вправо |
3. Управляемость многовинтовых судов
Двухвинтовые суда имеют следующие преимущества:
1) судно может управляться при одной машине, если другая выйдет из строя;
2) при выходе рулевого устройства судно управляемо под двумя машинами;
3) циркуляция одинакова вправо или влево, хорошо слушается руля на заднем ходу.
Недостатки: возможно повреждение винтов при швартовке, т.к. они удалены от ДП; винтовая струя не увеличивает рулевую силу, т.к. руль расположен не за винтами.
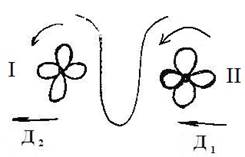
Рис. 3.10. Винты наружного вращения.
Обычно на судах устанавливаются винты наружного вращения (рис. 3.10.), т.к. при развороте на месте силы Д действует в одну сторону, если винт I работает вперед, а винт II – назад.
Силы Д, С и в уравновешиваются на установившемся ходу.
При переходе с переднего на задний ход, корма не уклоняется при руле прямо.
Установка винтов наружного вращения способствует улучшению управляемости судна. Сила реакции воды Д будет способствовать развороту судна.
При развороте на месте, машине работающей вперед, дают на одну степень меньший ход, чем машине работающей назад. Если обеим машинам дать одинаковый ход, будет наблюдаться продвижение судна с одновременным разворотом. Особенностью работы двух винтов является уравновешивание сил С, Д и в возникающих под действием каждого винта. Отсюда при движении вперед отсутствует забрасывание корны влево, судно движется прямолинейно. На заднем ходу судно подвержено воздействию сил Ру и В, это обстоятельство приводит к тому, что судно на заднем ходу обладает управляемостью лучшей по сравнению с одновинтовым судном.
При переходе с заднего хода на передний и наоборот, корма не уклоняется при руле прямо.
Таким образом наличие двух винтов на судах облегчает их управляемость и делает их более живучими по сравнению с одновинтовыми судами.
Трехвинтовое судно.
Трехвинтовые суда имеют крайние винты наружного вращения, средний винт правого шага, как у одновинтовых. Трехвинтовые суда обладают следующими преимуществами:
1) еще большая живучесть по сравнению с двухвинтовыми судами;
2) при выходе из строя рулевого устройства судно управляемо при помощи машин;
3) средний винт усиливает действие руля и улучшает поворотливость;
4) судно может в широких пределах менять диаметр циркуляции и разворачивается на месте.
Влияние среднего винта такое же, как и у одновинтового судна. Циркуляция 3-х винтового судна на переднем ходу вправо меньше, чем влево.
К недостаткам можно отнести сложность в управлении. В транспортном флоте 3-х винтовые суда можно встретить среди пассажирских судов и ледоколов.
4. Особенности работы ВРШ (винт регулируемого шага) при управлении судном.
1. ВРШ - позволяет изменять поступь винта, что даст возможность использовать полную мощность машины, в том числе и на заднем ходу; реверс выполняется разворотом лопастей винта вперед и назад при вращении гребного вала в одну сторону.
2. Время реверса сокращается на 30 – 40%, сокращается время торможения и длина тормозного пути приметно на те же значения.
Для выяснения влияния ВРШ на управляемость судна рассмотрим различные режимы его работы.
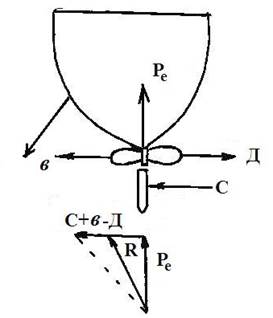
Рис. 3.11. Взаимодействие сил при режиме I.
I. На переднем установившемся ходу, как и у винта фиксированного шага. С уменьшением шага С и Д уменьшаются пропорционально, уменьшается и в (рис. 3.11.).
При выводе руля из ДП на него будут действовать рулевая сила Ру и сила винтовой струи Сс.
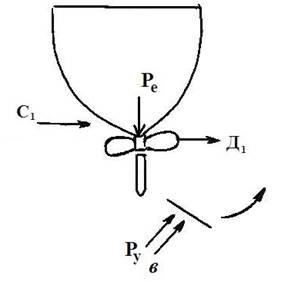
Рис. 3.12. Взаимодействие сил при режиме II.
II. При установившемся движении назад (рис. 3.13.) CI и ДI - действуют в одном направлении, корма идет вправо, а не влево как у ВФШ. На полном ходу Ру'+в больше ДI+CI на малом наоборот – силы ДI+CI могут превысить рулевую силу Ру' и силу всасываемой струи В.
Рус. 3.13. Взаимодействие сил при режиме III.
III. Реверс - переход с переднего на задний ход (рис. 3.13.). Все три силы уклоняют корму вправо резко (уменьшить можно рулем (Ру)); удобно швартовка правым бортом.
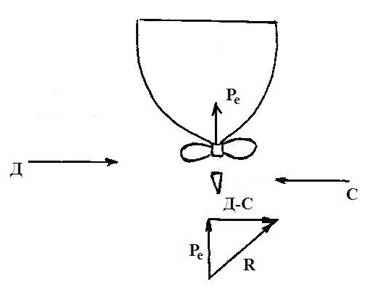
Рис. 3.14. Взаимодействие сил при режиме IV.
IV переход с заднего на передний (рис. 3.14.). Д>С в вначале корма пойдет вправо. Руль уходит из под силы С. В начале, как и ВФШ при винте правого шага. Преимущества судов, оборудованных ВРШ:
1. Соответствие шага и частоты вращения.
2. Увеличивает моторесурс двигателя за счет уменьшения реверсов
3. Позволяет применять дистанционное управление машиной
4. Сокращается время и путь торможения до 30-40%.
5. Облегчает швартовные операции, постановки, на якорь и др. маневры.
6. Получение любого значения скорости.
Недостатки:
1. Недостаточная надежность;
2. Масса ВРШ в 2-2,5 раза больше ВФШ;
3. КПД ВРШ на 1-3% меньше ВФШ;
4. Сложность устройства ВРШ по сравнению с ВФШ.
5. Работа руля, расположенного за корпусом и винтом судна.
На переложенный руль движущегося судна действует сила давления воды (скоростной напор) Р. Разложим эту силу по правилу параллелограмма на Ру - рулевую сяду (силу поворачивающую судно) и Рх – силу, увеличивающую сопротивление движению судна.
Если бы руль был изолированным, то рулевую силу Ру можно определить по формуле:
Ру=Су×ρ/2×Sр×V02 (1)
где Cу - коэффициент боковой составляющей, получаемой путем предувок моделей; ρ=104 кгс2/м4;
Sр – площадь пера руля, м2;
V0 – скорость судна, м/с;
В пределах угла перекладка руля от 0° до 35° Су можно определить по формуле:
Су=Ср×α (2)
где Ср – коэффициент руля, Ср=5,15/(1+2SP\hp)
α - угол перекладки руля, рад.
Подставляя выражение (2) в формулу (1) получим:
Py=Cp×ρ\2×Sp×V02α
Влияние корпуса – попутный поток.
На руль, помещенный за кормой судна действует сила попутного потока воды, направленная противоположно силе давления воды (скоростному напору). С учетом попутного потока скорость натекания вода на руль за кормой судна будет равна:
Ve=(1-ψ)V0 (3)
где ψ - коэффициент попутного потока, определявши приближенно по формуле ψ =0,55 δ-0,05 (δ - коэффициент полноты водоизмещения).
С учетом выражения (3) формула (1) примет вид:
Pe=Cp×ρ\2×Ve2×α (4)
Кроме силы попутного потока на переложенный руль действует осевая составляющая силы винтовой струи. Значение скорости винтовой струи определяется по формуле:
 ,
,
где S – коэффициент нагрузки винта по упору Ре, определяемый по выражению:
 ,
,
где Ре – упор винта на швартовых, Ре=0,01Ni;
Ni - индикаторная мощность двигателя, л.с.
Тогда скорость набегания воды на руль найдем по формуле:
Vp=V0-Ve+Va,
а рулевую силу по формуле:
 .
.
| <== предыдущая лекция | | | следующая лекция ==> |
| Чем шире набор привлекаемых знаковых средств, тем разнообразнее возможности формирования выразительного имиджа. | | | Полное использование держащей силы якоря и якорь-цепи |
Дата добавления: 2015-12-29; просмотров: 3144;