Теорема о сложении ускорений плоской фигуры
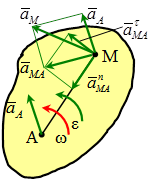
Теорема: Ускорение любой точки М плоской фигуры геометрически складывается из ускорения какой-либо другой точки плоской фигуры (А) принятой за полюс и ускорения, которое получает эта точка (М) при вращении фигуры вокруг полюса (А).
 .
.
Так как ускорение вращения точки может быть представлено как сумма касательного и нормального ускорений, то имеем:
 .
.
Вектор  направлен всегда от точки М к полюсу А; вектор
направлен всегда от точки М к полюсу А; вектор  и направлен в сторону «указанную» угловым ускорением ε.
и направлен в сторону «указанную» угловым ускорением ε.
Векторное уравнение может быть решено аналитически, для чего его необходимо спроецировать на координатные оси, или графически с помощью построения плана ускорений.
Планом ускорений называется векторная диаграмма, построенная на основе теоремы сложения ускорений. Покажем порядок построения плана ускорений для кривошипно-ползунного механизма.
Пусть заданы: положение механизма, длины звеньев 



 и
и  . Так как точка А механизма вращается по окружности радиуса
. Так как точка А механизма вращается по окружности радиуса  , то
, то
 ;
;  .
.
Сложим эти вектора, предварительно выбрав масштабный коэффициент, 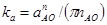 и определив их «чертежные» длины. Конец суммарного вектора
и определив их «чертежные» длины. Конец суммарного вектора  обозначим буквой a. Так как шатун АВ совершает плоское движение, применим к нему теорему сложения ускорений, приняв за полюс точку А, ускорение которой уже известно:
обозначим буквой a. Так как шатун АВ совершает плоское движение, применим к нему теорему сложения ускорений, приняв за полюс точку А, ускорение которой уже известно:
 .
.
Рассчитаем модуль и «чертежную» длину вектора  :
:
 , где
, где  должно быть определено ранее аналитически или графически. Отложим этот вектор от точки плана а//АВ (направление на шатуне АВ - от В к полюсу А), конец вектора обозначим
должно быть определено ранее аналитически или графически. Отложим этот вектор от точки плана а//АВ (направление на шатуне АВ - от В к полюсу А), конец вектора обозначим  . Из точки проведем пунктирную прямую
. Из точки проведем пунктирную прямую  до пересечения с прямой проведенной из полюса плана ускорений π //OB. Пересечение этих прямых обозначим b.
до пересечения с прямой проведенной из полюса плана ускорений π //OB. Пересечение этих прямых обозначим b.
 ;
;  .
.
Чтобы определить на плане положение точки с, соединим точки а и b отрезком прямой и построим сходственно расположенный Δabc~ΔABC на шатуне АВ (правило подобия). Направим стрелку от полюса плана π к точке с .

 .
.
Дата добавления: 2016-01-29; просмотров: 1232;