Аналитическое определение равнодействующей
Равнодействующую системы сходящихся сил можно определить и аналитически (способом проекций). Для этого необходимо воспользоваться теоремой: проекция равнодействующей на данную ось равна алгебраической сумме проекций слагаемых сил на ту же ось.
Проекции равнодействующей на координатные оси х и у определяются как суммы проекций составляющих.


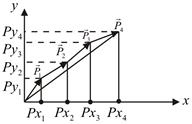
Рис. 4.11
Для удобства и простоты индекс и пределы суммирования ставить не будем:

 . (4.8)
. (4.8)
 (4.9)
(4.9)
Зная проекции, определяют модуль и направление равнодействующей по формулам:

При решении задач на сложение плоской системы сходящихся сил аналитическим способом необходимо: выбрать систему координатных осей х и у;найти углы каждой силы с координатными осями, а затем, определив проекции равнодействующей, найти ее модуль и направление.
Пример 4.Даны силы P1 = 20 Н, P2 = 26 Н, P3 = 16 Н, приложенные к точке О. Силы составляют между собой следующие углы:  ,
,  ,
,  (рис. 4.12).
(рис. 4.12).
Определить равнодействующую  .
.




|
|
| |
|
|
|
|
|
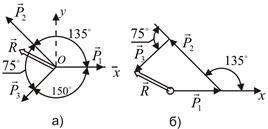
Рис. 4.12
Решение. Примем точку О за начало координат, линию действия силы  ‑ за ось x, а прямую, перпендикулярную , – за ось у (рис. 4.12, а). Тогда заданные силы составят с положительным направлением оси х углы:
‑ за ось x, а прямую, перпендикулярную , – за ось у (рис. 4.12, а). Тогда заданные силы составят с положительным направлением оси х углы:  ,
,  ,
,  а с положительным направлением оси у соответственно:
а с положительным направлением оси у соответственно:  ,
,  ,
,  .
.
Определим проекции равнодействующей:
Тогда модуль и направление равнодействующей равны:
 ;
;
 ,
,  ;
;
 ,
,  .
.
Этот же результат можно получить и геометрически, построив в определенном масштабе силовой многоугольник (рис. 4.12, б).
Метод проекции при решении задач на равновесие системы особенно удобен в том случае, если в систему входит более трёх сил.
4.6. Геометрическое и аналитическое условия
равновесия системы сходящихся сил
Необходимым и достаточным условием равновесия плоской системы сходящихся сил является равенство нулю равнодействующей этой системы сил. Это условие можно выразить одним векторным равенством:
 (4.10)
(4.10)
или двумя алгебраическими (скалярными) равенствами:
 ,
,  (4.11)
(4.11)
Векторное равенство выражает условие замкнутости многоугольника данных сил, т.е. условие равновесия плоской системы сходящихся сил в геометрической форме (4.10).
Равенства выражают условие равновесия плоской системы сходящихся сил в аналитической форме (4.11), и их называют условиями равновесия плоской системы сходящихся сил: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на координатные оси были равны нулю.
Методические указания к решению задач
геометрическим способом
При решении задач геометрическим (графическим) способом необходимо придерживаться следующего порядка.
1. Выделить тело (или точку), равновесие которого следует рассмотреть.
2. Изобразить все активные (заданные) силы, действующие на выделенное тело.
3. Освободить это тело от наложенных на него связей, заменив их действие реакциями связей.
4. Построить замкнутый силовой многоугольник (или треугольник, если действуют три силы). При этом следует сначала сложить все заданные, а затем достроить неизвестные силы.
5. Решить силовой многоугольник (по известным элементам определить неизвестные) или, если силовой многоугольник построен в масштабе, определить искомые силы по масштабу.
Методические указания к решению задач
аналитическим способом
При решении задач аналитическим способом рекомендуется придерживаться следующего порядка.
1. Выделить тело (или точку), равновесие которого следует рассмотреть.
2. Изобразить активные (заданные) силы, действующие на выделенное тело.
3. Освободить тело от наложенных на него связей, заменив их действие реакциями связей.
4. Выбрать систему координат. Координатные оси следует по возможности направлять по неизвестным силам, тогда проекция неизвестной силы на перпендикулярную ей ось окажется равной нулю. Благодаря этому в уравнение равновесия войдет только одно неизвестное.
5. Составить уравнения равновесия плоской системы сил:  ,
,  . При проектировании силы на ось модуль силы следует умножать на косинус острого угла независимо от того, с каким направлением оси (положительным или отрицательным) он образован. Проекция соответственно положительна или отрицательна (рис. 4.8).
. При проектировании силы на ось модуль силы следует умножать на косинус острого угла независимо от того, с каким направлением оси (положительным или отрицательным) он образован. Проекция соответственно положительна или отрицательна (рис. 4.8).
6. Решить уравнения равновесия относительно искомых величин.
Преимущества аналитического способа проекций перед геометрическим способом силового многоугольника особенно заметны в задачах на равновесие системы более трёх сил. Действительно, решение силового четырёх-, пяти- и n-угольника представляет известные трудности, в то время как решение методом проекций не усложняется при увеличении числа проектируемых сил.
Пример 5. В шарнире В кронштейна ABC подвешен груз весом G = 100 Н. Определить усилия в стержнях кронштейна, если a = 110°, b = 30°, g = 40°. Стержни прикреплены к стене шарнирно (рис. 4.13, а).
|
|
|
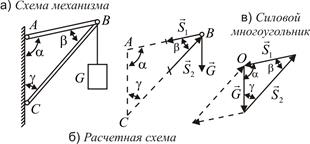
Рис. 4.13
Решение. Рассмотрим равновесие шарнира В (рис. 4.13, б). К нему приложена активная сила  . Отбросим связи, заменив их реакциями
. Отбросим связи, заменив их реакциями  и
и  . Предположим, что стержень АВ растянут, a стержень ВC сжат. Тогда будет направлена от шарнира В, а – к нему. Итак, на узел В действует система трёх сходящихся сил.
. Предположим, что стержень АВ растянут, a стержень ВC сжат. Тогда будет направлена от шарнира В, а – к нему. Итак, на узел В действует система трёх сходящихся сил.
Для решения применим геометрический способ. Поскольку шарнир находится в равновесии, то силовой треугольник, составленный из этих сил, должен быть замкнут. Из некоторой точки О (рис. 4.13, в) в выбранном масштабе строим вектор , а затем из его начала и конца проводим прямые, параллельные направлениям и до их пересечения. По масштабу находим  =130 Н,
=130 Н,  = 190 Н. Совершая обход по треугольнику в направлении силы , замечаем, что полученные направления реакций стержней совпадают с первоначально выбранными. Следовательно, стержень АВ растягивается, а стержень ВС сжимается.
= 190 Н. Совершая обход по треугольнику в направлении силы , замечаем, что полученные направления реакций стержней совпадают с первоначально выбранными. Следовательно, стержень АВ растягивается, а стержень ВС сжимается.
Модули  и можно также определить по теореме синусов:
и можно также определить по теореме синусов:
 ,
,
откуда


Пример 6. На оси шарнира В свободно вращается блок (рис. 4.14). Через блок перекинута нить, с помощью которой удерживается груз весом G = 50 Н. Определить усилия в стержнях АВ и ВС. При этом диаметром блока, трением нити можно пренебречь.
Решение. Для решения применим аналитический метод.
1. Выделим точку, равновесие которой следует рассмотреть: в данной задаче это будет точка В неподвижного блока.
2. Изобразим векторы всех активных сил, действующих на нее: в нашем примере это натяжение вертикальной ветви нити и натяжение горизонтальной ветви нити, равные весу груза.
3. Мысленно отбросим связи и заменим их реакциями  и
и  .
.
4. Все силы изобразим в виде векторов, предположив, что стержни АВ и ВС растянуты, направив соответственно и от узла В.
Выбрав направление координатных осей х и у,составим два уравнения равновесия:
 ;
;  ;
;
 ;
;  .
.
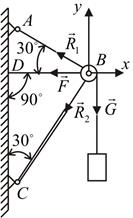
Рис. 4.14. Шарнирно-стержневая система
Учитывая, что F = G = 50 Н, решив совместно оба уравнения, получим R1= – 18,6 Н; R2= – 68,5 Н. Здесь знак «–» указывает на то, что стержни АВ и ВС сжаты, а не растянуты, как мы предполагали ранее.
Контрольные вопросы
1. Как влияет угол между двумя сходящимися силами на модуль их равнодействующей?
2. Какие условия необходимы для того, чтобы задача разложения силы на две составляющие была определённой?
3. Для чего и как строится силовой многоугольник?
4. В чем заключается геометрическое условие равновесия плоской системы сходящихся сил?
5. Чему равна проекция силы на ось?
6. В каких случаях проекция силы на ось равна нулю, и в каких случаях она равна модулю силы?
7. Как определяется знак проекции силы на ось?
8. Как найти модуль и направление силы, если известны ее проекции на две взаимно перпендикулярные оси координат?
9. В чем заключаются аналитические условия равновесия плоской системы сходящихся сил?
Дата добавления: 2015-12-26; просмотров: 20159;