Функциональная схема управления положением с использованием полупроводникового преобразователя
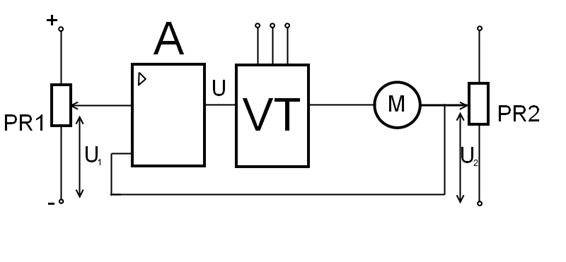
PR1 – задающий потенциометр
А – суммирующий усилитель, на выходе которого формируется сигнал управления U=(U1-Un)β
VT - силовой преобразователь
М – двигатель. Управление двигателем осуществляется за счет управляемого преобразователя, которой может быть и реверсивным.
β - коэффициент усиления. Выбирается из условий обеспечения заданной точности. Чем меньше допустимое рассогласование, чем выше должен быть коэффициент усиления, что может привести к ухудшению динамических показателей к устойчивости системы. Для улучшения динамических свойств используют обратную связь по скорости, ускорению и тока двигателя.
Схема-есть
В схеме используется широтноимпульсная схема с транзисторным преобразователем; открытое состояние транзисторов VT1 и VT4 соответствует направлению вперед, а VT2-VT3 – назад.
Диоды VD1…VD4 – возвратные диоды необходимые для обеспечения прохождения при запертом состоянии ключей БУП преобразователем (блок управления).
БУП - блок управления преобразователем.
УУ - устройство управления, формирующий сигнал управления в зависимости от задающих сигналов и обратных связей по положению, скорости и току.
Вместо РС по току может использоваться ОС по ускорению. Для формирования сигнала ОС по положению используется датчик угла поворота (П) и датчика скорости (ТГ).
Uy=Uз-Uот-Uoc-Uоп
Дата добавления: 2015-10-09; просмотров: 1516;