Структуры и режимы работы систем управления положением
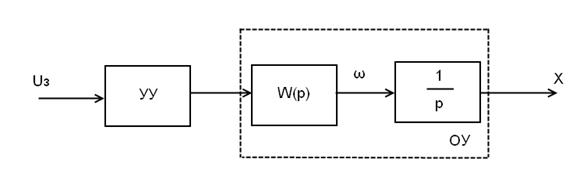
а) разомкнутая система управления
Применяется, если требуемая точность невысокая. При подходе к заданному положению задающий сигнал становится нулевым и формируется сигнал для перехода на пониженную скорость, что вызывает улучшение точности, а затем выключается.
б) схема управления по возмущению
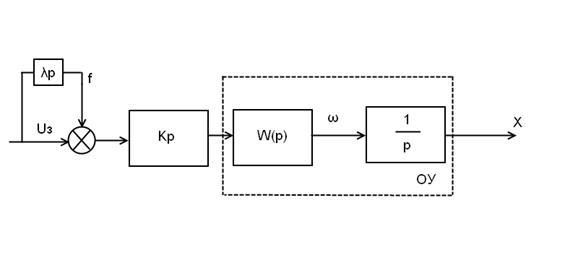
Kp – коэффициент усиления регулятора (передаточная функция)
Основным возмущающим воздействием системы контурного управления является скачок скорости задающего сигнала. При скачкообразном изменении задающего сигнала требуется скачок скорости, т.е. происходит пуск или торможение машины.
Поскольку ускорение машины требует некоторого времени для изменения скорости, то должно произойти рассогласование скоростей. Поэтому в данную систему вводится компенсация на возмущающее воздействие с коэффициентом усиления λ, он способствует скорейшему изменению скорости при скачке изменения задания.
Достоинства системы: отсутствие датчиков положения.
Недостатки: неучтенные другие возмущающие воздействия.
в) схема по отклонению
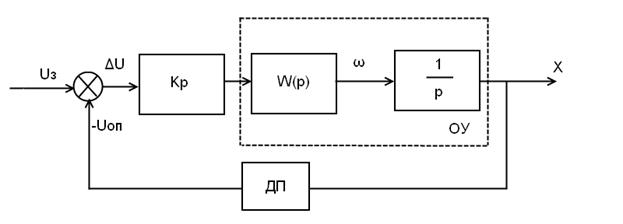
Если на вход системы подается задающее воздействие, то сигнал управления, а значит, скорость возрастают, увеличивается выходной сигнал, уменьшается ошибка рассогласования ΔU.
г) схема управления положением по возмущению и с ОС по положению
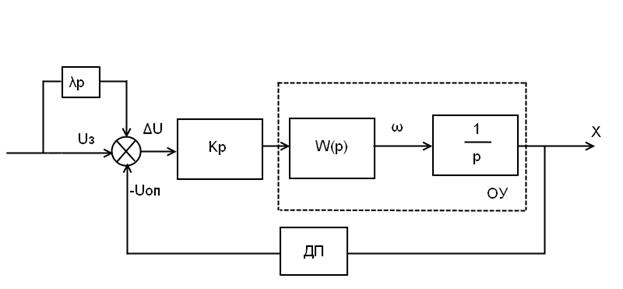
В режиме позиционирования величина задающего сигнала определяет требуемое положение рабочего органа при наличии статического момента на валу машины установившейся режим достигается при Uз=const и сигнал рассогласования х=0. Сигнал управления пропорционален статическому моменту, поскольку он необходим для создания электромагнитному моменту двигателя. Если применять ПИ-регулятор положения, то ошибка позиционирования будет прямо пропорциональна статическому моменту. Для устранения ошибки применяют астатические, т.е ПИ-регуляторы. В режиме контурного управления основным задающим воздействием, для которого выполняется расчет системы, является скачек скорости. Установившейся режим характеризуется постоянством скорости.
ЭП по системе генератор-двигатель (Г-Д)
В системе Г-Д любой режим работы двигателя можно получить изменением величины и полярности подводимого к якорю напряжения.
Уравнение механической характеристики системы Г-Д имеет вид.
 - сопротивление цепи якоря состоит из сопротивления якоря двигателя, сопротивления якоря генератора, и проводов;
- сопротивление цепи якоря состоит из сопротивления якоря двигателя, сопротивления якоря генератора, и проводов;
 - ЭДС генератора.
- ЭДС генератора.
Система Г-Д состоит из двигателя постоянного тока с независимым возбуждением. Его обмотка якоря питается от генератора постоянного тока. Обмотки возбуждения генератора и двигателя питаются от источника постоянного тока. Генератор приводится во вращение с постоянной частотой двигателем переменного тока (для агрегатов большой мощности – синхронным двигателем, а для малой и средней мощности – асинхронным).
Регулировка выходного напряжение генератора производится изменением величины тока возбуждения генератора. Для реверсирования двигателя меняет полярность напряжение на обмотке возбуждения генератора. Это приводит к изменению направление вращения двигателя.
Управление данной системой осуществляется в цепях возбуждения, что дает возможность применять слаботочную аппаратуру, а значит, облегчает операции управления и удешевляет оборудование. Недостатком данной системы управления является большое время переходных процессов.
Скоростные характеристики:
Механические характеристики:
где Е - ЭДС, развиваемая генератором, В:
Ф - магнитный поток обмотки возбуждения двигателя, Вб
Rяг, Rяд - сопротивления обмоток якорей генератора и двигателя, Ом;
CД - конструктивная постоянная двигателя;
ω - угловая скорость двигателя, с-1
Iя - ток якорной цепи, А
M - момент развиваемый двигателем, Нм
Регулирование частоты вращения двигателя напряжением генератора возможно только вниз от основной характеристики, т.к. повышение напряжения на зажимах якоря электродвигателя выше номинального не допустимо. Механические характеристики при регулировании в системе Г-Д мягче из за наличия в якорной цепи двух сопротивлений Rяг, и Rяд.
При регулировании магнитным потоком изменение частоты вращения двигателя возможно только вверх от номинальной характеристики при этом, с ослаблением магнитного потока крутизна характеристик падает, а частота вращения холостого хода увеличивается.
Верхний предел частоты вращения определяется условиями без искровой коммутации устойчивой работы и механической прочности двигателя.
Семейство характеристик при регулировании частоты вращения двигателя в системе Г-Д напряжением и магнитным потоком представлены на рисунке 2.
Регулирование частоты вращения при изменении выходного напряжения генератора происходит при постоянном моменте двигателя, а ослабление потока обмотки возбуждения двигателя при постоянной мощности. Это объясняется тем, что при изменении напряжения момент двигателя остается постоянным. При регулировании частоты вращения магнитным потоком, момент уменьшается в силу уменьшения величины Ф. Мощность при этом остается постоянной.
Основным видом торможения в системе Г-Д является торможение с отдачей энергии в сеть. Процесс торможения осуществляется ослабление магнитного потока генератора или усилением магнитного поля двигателя, если он работает с ослабленным потоком.
В этих случаях ЭДС двигателя становится дольше ЭДС генератора. Генератор переходит в двигательный режим и ускоряет асинхронный двигатель до скорости выше синхронной, отдавая энергию в сеть.
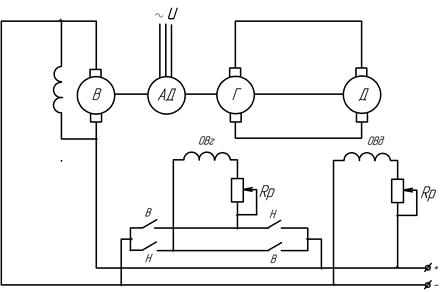
схема регулируемого ЭП по системе «Генератор-Двигатель»
Достоинство системы Г-Д:
1. Возможность плавного регулирования скорости в диапазоне 1:30
2. Возможность плавного пуска реверсирования и торможения с отдачей энергии в сеть
3. Отсутствие громоских пусковых реостатов
4. Возможность использования в качестве электромеханической передачи (транспортные механизмы).
 | |||
 | |||
Семейство характеристик при регулировании частоты вращения двигателя в системе Г-Д напряжением и магнитным потоком
Основные недостатки системы Г-Д:
1. Большая установленная мощность, превышающая примерно в три раза мощность двигателя.
2. Высокая первоначальная стоимость машинного оборудования
3. Сравнительно низкий коэффициент полезного действия
МТЗ - предназначена для срабатывания даже при кратковременном повышении установленного значения тока. Для защиты используется реле тока.
Нулевая защита или от самозапуска, при кнопочном управлении двигателя такую защиту осуществляет контактор или пускатели в этих схемах включены параллельно пусковой кнопке замыкающий блок контакты.
Зашита от обрыва цепи обмотки возбуждения применяется для ДПТ и СД и выполняется на реле минимального тока, катушка реле обрыва поля РОП включается последовательно с обмоткой возбуждения.
Дата добавления: 2015-10-09; просмотров: 1382;