Следящий ЭП
Следящий ЭП – это ЭП, который обеспечивает с заданной точностью движение исполнительного органа рабочей машины в соответствии с произвольно меняющимся входным сигналом управления.
Этот сигнал может изменятся по произвольному временному закону и может быть механическим, электрическим. Чаще всего входной сигнал представляет собой скорость или угол поворота оси или вала задающего устройства.
Следящий электропривод используется в спутниковой связи, металлообрабатывающих станках, для привода роботов, манипуляторов, в автоматических электрических устройствах.
Следящий электропривод по способу действия СУ:
следящий электропривод с релейным или прерывистым управлением;
с непрерывным управлением.
Следящий электропривод с релейным управлением отличается тем, что напряжение на исполнительный двигатель подается только в том случае, когда угол рассогласования достигает определенного значения. В процессе рассогласования при возрастании угла до необходимого значения – двигатель неподвижен. Угловая скорость и ускорение двигателя после его включения не зависит от угла рассогласования, а определяется параметрами самого двигателя.
В следящем электроприводе прерывистого действия обычно используются релейно-контактные аппараты или безконтактные устройства с релейной характеристикой. Поэтому электропривод такого типа получил название релейный. Отличительной особенностью следящего электропривода непрерывного действия является непрерывное управление исполнительным двигателем зависящем от угла рассогласования.
В соответствии с требованиями, предъявляемыми к электроприводу в отношении точности обработки угла поворота, статической устойчивости работы, времени переходного процесса следящий электропривод выполняют с обратной связями, которые обеспечивают управление функции угла рассогласования и его производной, по углу рассогласования и интегралу этого угла и т.п.
Для схем управления следящего электропривода используется различного рода усилители:
1)электромашинные;
2)магнитные ;
3)полупроводниковые;
4)гидравлические;
5)сочетание усилителей.
По конструктивному соотношению следящий электропривод непрерывного управления, обеспечивающий высокую точность обработки, является более сложным относительно привода релейного действия.
Основные технические требования следящего электропривода:
высокая точность обработки сигнала;
устойчивая работа привода во всем диапазоне скоростей;
малое время переходного процесса;
простота, надежность эксплуатации.
Следящий электропривод непрерывного управления
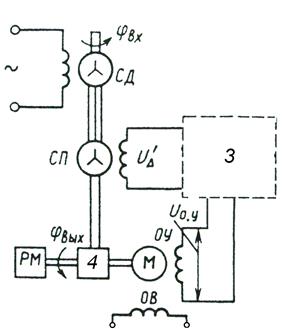
СД (сельсин датчик), СП (сельсин приемник), составляющий измеритель рассогласования, работающих в трансформаторном режиме; усилитель 3 трансформатора двигателя связанного с рабочим механизмом и связанного с СП через механическую передачу 4.
Положение ротора СД определяет входной сигнал угла φвх, а положение ротора СП зависит от угла поворота вала электропривода. Сигнал рассогласования, снимаемый с обмотки статора СП, пропорционален разности значения углов φвх- φвых=ΔU
При повороте ротора СД в однофазной обмотке СП наводится ЭДС, которое воздействует на усилитель 3, а усилитель обеспечивает включение двигателя и его работу с определенной скоростью. Двигатель соответственно приводит к движению рабочий механизм (РМ) и одновременно через передачу 4 воздействует на ротор СП. При повороте ротора СП на заданный угол, устраняется величина рассогласования в положениях роторов датчика и приемника и прекращается работа исполнительного двигателя.
В следящих электроприводах используются ДПТ, двигатель переменного тока обычно это двигатели небольшой мощности. СУ выполняются с электромашинным усилителем (ЭМУ) по системе Г-Д или системе ТП-Д. Кроме того могут использоваться двухфазные двигатели переменного тока с КЗ ротором и синхронные двигатели с постоянными магнитами.
Дата добавления: 2015-10-09; просмотров: 3251;