Уравнения объекта, управляемого от ЦВМ, в переменных состояния
Рассмотрим последовательное соединение ЦАП, объекта управления и АЦП (рис. 6), входящих в функциональную схему цифровой системы управления. При этом будем считать, что u[i] является r-векторной управляющей последовательностью, a y[i] - l-векторной управляемой последовательностью, другими словами, будем считать объект управления многомерным, имеющим r входных и l выходных сигналов. Кроме того,

предположим, что известны уравнения объекта в переменных состояния
 , (2)
, (2)
 ,
,
связывающие управляемый y(t) и управляющий u(t) сигналы. Здесь  - матрицы соответственно размерностью
- матрицы соответственно размерностью  ,
,  и
и  , n - размерность вектора состояния объекта х(t), иначе - порядок объекта управления.
, n - размерность вектора состояния объекта х(t), иначе - порядок объекта управления.
Для получения математической модели такого соединения надо, прежде всего, найти описание преобразователей АЦП и ЦАП.
Описание ЦАП. С ЦВМ на вход ЦАП поступает векторный цифровой сигнал с периодом дискретизации Т, моделью которого является управляющая
последовательность u[i].
ЦАП преобразует такой цифровой сигнал в непрерывный управляющий сигнал u(t), используя выражение
 ,
,  . (3)
. (3)
Отсюда процесс цифроаналогового преобразования можно интерпретировать как сохранение постоянного уровня управляющего сигнала между моментами дискретизации (рис.7). В результате преобразования образуется сигнал u(t) "ящичного" типа.
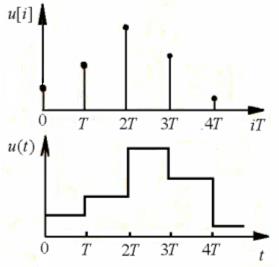
Рис. 7
Таким образом, математической моделью ЦАП можно считать устройство, "растягивающее" каждое значение управляющей последовательности u[i] на период дискретизации, т.е. до прихода следующего значения, и описываемое (3). Подобное устройство принято называть фиксатором или экстраполятором нулевого порядка и схематически обозначать в виде, изображенном на рис. 8. Фактически на выходе фиксатора получаем не сам непрерывный сигнал u(t), который поступает на АЦП, а его аппроксимацию  (рис. 7,а).
(рис. 7,а).
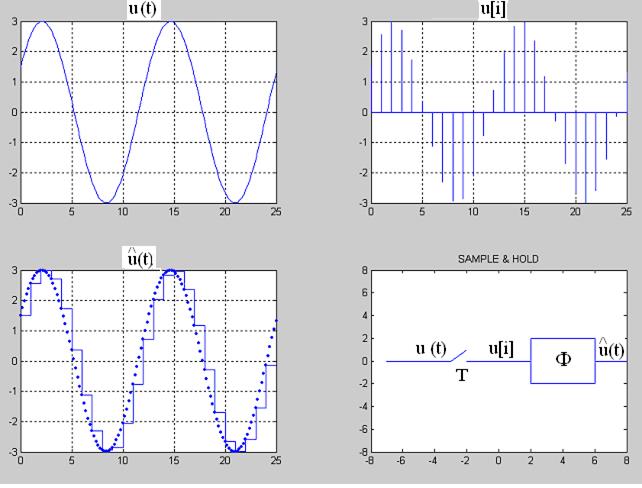
Рис. 7,а
 Описание АЦП. АЦП оперирует непрерывным сигналом - управляемой величиной y(t), получаемой с выхода объекта управления, и преобразует этот сигнал в цифровой сигнал - последовательность кодовых групп импульсов, появляющихся в моменты
Описание АЦП. АЦП оперирует непрерывным сигналом - управляемой величиной y(t), получаемой с выхода объекта управления, и преобразует этот сигнал в цифровой сигнал - последовательность кодовых групп импульсов, появляющихся в моменты  .
.
Абстрагируясь от физического носителя информации об управляемой величине, можно принять в качестве математической модели АЦП устройство, преобразующее управляемую величину y(t) в числовую управляемую последовательность  .
.
 Такое устройство называется ключом или дискретизатором и обозначается на схемах в виде, представленном на рис. 9.
Такое устройство называется ключом или дискретизатором и обозначается на схемах в виде, представленном на рис. 9.
Следовательно, математическую модель последовательного соединения ЦАП - объект управления - АЦП можно представить, как показано на рис. 10 .
 Нетрудно видеть, что такое соединение эквивалентно дискретному фильтру, входом и выходом которого являются соответственно управляющая u[i] и управляемая y[i] последовательности.
Нетрудно видеть, что такое соединение эквивалентно дискретному фильтру, входом и выходом которого являются соответственно управляющая u[i] и управляемая y[i] последовательности.
Поставим задачу: найти разностные уравнения в переменных состояния, связывающие управляемую y[i] и управляющую u[i] последовательности. Как известно, решение уравнения состояния (2) имеет вид
 , (4)
, (4)
где  - начальное состояние, т.е. значение вектора состояния в момент
- начальное состояние, т.е. значение вектора состояния в момент  . Положим
. Положим  ,
,  . Учитывая также, что в промежутки между моментами дискретизации управляющий сигнал, снимаемый с выхода фиксатора, постоянен, т.е.
. Учитывая также, что в промежутки между моментами дискретизации управляющий сигнал, снимаемый с выхода фиксатора, постоянен, т.е.
, ,
из (4) получаем
 , (5)
, (5)
где
 ,
,  . (6)
. (6)
Введя другую переменную интегрирования  , так что
, так что  , приводим выражение для матрицы В к более простому виду
, приводим выражение для матрицы В к более простому виду
 . (7)
. (7)
Полагая в уравнении выхода  (2) ,
(2) ,  , получаем
, получаем
 . (8)
. (8)
Система уравнений (5) и (8) образует уравнения в переменных состояния объекта, управляемого ЦВМ.
Таким образом, поведение объекта, управляемого ЦВМ, описывается уравнениями, не отличающимися от уравнений (1) в параграфе 3.8, что позволяет рассматривать этот объект как эквивалентный дискретный фильтр. Матрицы А и В разностного уравнения состояния находят по известным матрицам  и
и  аналитическим путем, используя теорему Кэли-Гамильтона, согласно которой
аналитическим путем, используя теорему Кэли-Гамильтона, согласно которой
 ,
,
где коэффициенты  определяются соответствующими приемами, или используя разложение экспоненциальной функции в ряд
определяются соответствующими приемами, или используя разложение экспоненциальной функции в ряд
При этом вычисление последующих членов разложения прекращают, когда добавки мало влияют на значение правой части матрицы  . Еще один метод основан на формуле
. Еще один метод основан на формуле
 , (9)
, (9)
где  - оператор обратного преобразования Лапласа.
- оператор обратного преобразования Лапласа.
Лекция 14
Пример. Пусть объект управления представляет собой двойной интегратор с одним входом u(t) и одним выходом y(t), описываемый уравнениями в переменных состояния
 ,
,  .
.
В данном случае
 ,
,  .
.
Найдем векторные разностные уравнения этого объекта при управлении от ЦВМ.
Учитывая, что

и используя (9), получаем
 .
.
Следовательно,
 .
.
Так как
 ,
,
то в соответствии с (7)
 .
.
Согласно (5) и  (8) искомые разностные уравнения в переменных состояния имеют вид
(8) искомые разностные уравнения в переменных состояния имеют вид
 (10)
(10)
 .
.
Заметим, что элементы матриц А и В, входящих в уравнение (10), не только в этом примере, но и в общем случае зависят от периода дискретизации Т. Поэтому для их обозначения иногда используют выражения А(Т), В(Т).
Если объект управления имеет один вход и один выход, то его разностные уравнения в переменных состояния можно найти другим способом, а именно, в начале определить дискретную передаточную функцию объекта (см. ниже), затем найти разностное уравнение n порядка, связывающее у[i] и u[i], и, наконец, преобразовать последнее в векторные разностные уравнения.
В дальнейшем последовательное соединение фиксатора, объекта и ключа (рис. 4) будем называть управляемой цифровой системой или просто цифровой системой.
Дата добавления: 2015-08-14; просмотров: 1158;