ИНЖЕНЕРНЫЕ МЕТОДЫ РАСЧЕТА И ВЫБОРА РЕГУЛЯТОРОВ
Технологические агрегаты, машины, в которых одна или несколько технологических величин, характеризующих их состояние, поддерживаются автоматически регуляторами на заданном значении или изменяются по определенному закону, называют технологическими объектами управления. Объекты управления отличаются большим разнообразием. Это могут быть тепловые агре-
гаты, в которых регулируются температура или давление, электрические приводы, скорость вращения вала которых должна быть постоянной или изменяться по определенному закону, резервуары с регулируемым уровнем и т.д.
Свойства технологических объектов управления.Каждый технологический объект управления представляет собой динамическую систему со входными и выходными величинами. К входным величинам объектов относят регулирующие воздействия х (потоки жидкостей, сыпучих материалов, потоки тепла и пр.), которые с помощью исполнительных механизмов можно изменять, а также разнообразные возмущающие воздействия z (изменение параметров сырья, энергии, состояния технологического оборудования и т. д.). Одним из существенных возмущений является изменение нагрузки объекта. Под нагрузкой технологического объекта управления понимают количество вещества (энергии), которое проходит через объект в единицу времени.
Выходные величины — регулируемые величины у объектов управления — характеризуют протекание технологического процесса в объекте. Такими величинами могут быть температура, давление, расход вещества, влажность материала и др. Текущие значения регулируемых величин определяют протекание процессов в объекте в данный момент времени. Под влиянием возмущающих воздействий регулируемые величины изменяются во времени.
Объект управления может иметь не одну, а несколько регулируемых величин и несколько регулируемых воздействий, причем между ними возможны различные взаимосвязи.
Различают одномерные и многомерные объекты управления. Одномерные объекты имеют одну регулируемую величину, а многомерные — две, три и более.
В многомерных объектах с независимыми регулируемыми величинами изменение любой из входных величин приводит к изменению только своей регулируемой величины. В многомерных объектах с взаимозависимыми выходными величинами изменение входных величин приводит к одновременному изменению нескольких регулируемых величин, что объясняется наличием в объектах каналов перекрестных связей.
В объектах с сосредоточенными параметрами характер изменения выходной величины во времени зависит только от регулирующих и возмущающих воздействий (например, уровень жидкости в резервуаре). В объектах с распределенными параметрами регулируемые величины имеют разные значения в различных точках объекта в данный момент времени (например, температура по длине сушилки и др.).
При всем разнообразии технологических объектов управления наиболее часто встречающиеся из них могут быть разделены на сравнительно небольшое число типов, обладающих аналогичными динамическими характеристиками и характеризующихся следующими свойствами: емкостью, способностью к самовыравниванию и запаздыванием процесса.
Емкость объекта. Работа любого объекта управления связана с притоком, расходом и преобразованием вещества или энергии.
Многие объекты обладают способностью аккумулировать рабочую среду, запасать ее внутри объекта. Такая способность называется аккумулирующей способностью или емкостью объекта. Емкость присуща всем динамическим объектам. Она характеризует их инерционность — степень влияния входной величины на скорость изменения выходной. Объект может обладать емкостью только при наличии в нем сопротивления выходу вещества или энергии.
Объекты управления подразделяются на одноемкостные и многоемкостные. Объект управления является одноемкостным, если он состоит из одного сопротивления и одной емкости. Много емкостными называют такие объекты, которые имеют две (или более) емкости, участвующие в процессе управления и разделенные переходными сопротивлениями.
Самовыравнивание технологического объекта управления характеризует его устойчивость. Установившееся состояние объекта, работающего при постоянной нагрузке, может быть нарушено из-за изменения притока или расхода вещества или энергии, т. е. нанесением возмущающего воздействия. При этом управляемые величины будут увеличиваться или уменьшаться в зависимости от того, что окажется больше: приток или расход.
Способность объекта самостоятельно приходить после нанесения возмущения в новое установившееся состояние называется самовыравниванием объекта. Такие объекты считают объектами с самовыравниванием или статическими.
Самовыравнивание — это результат внутренней отрицательной обратной связи в устойчивом объекте, т. е. влияния управляемой величины на приток и расход вещества или энергии. Самовыравнивание характеризует устойчивость объекта, способствует стабилизации управляемой величины и, таким образом, облегчает работу управляющего устройства.
Управляемая величина объекта, не обладающего самовыравниванием, после приложения возмущающего воздействия неограниченно возрастает или убывает, т. е. управляемый параметр никакого обратного воздействия на приток или расход не оказывает. Такие объекты называют астатическими, или нейтральными.
При отсутствии возмущения астатический объект может находиться в состоянии равновесия при любых значениях управляемой величины. При нарушении равновесия процесса скорость изменения управляемой величины пропорциональна величине возмущающего воздействия. Отсутствие самовыравнивания ухудшает возможности управления объектом.
Запаздывание технологического объекта управления выражается в том, что его выходная величина начинает изменяться не сразу после нанесения возмущения, а через некоторый промежу-
ток времени т, называемый временем запаздывания. Все реальные объекты обладают запаздыванием, так как изменения потоков вещества или энергии распространяются в объекте с конечной скоростью и требуется время для прохождения сигнала от места нанесения возмущения до места, где фиксируется изменение управляемой величины.
Запаздывание всегда неблагоприятно сказывается на качестве процесса управления объектом.
Выбор регулятора.Под выбором регулятора подразумевается выбор простейшего закона регулирования, наиболее дешевого и простого в эксплуатации регулятора, обеспечивающего при различных возмущениях заданное качество регулирования.
Для выбора и расчета показателей настройки регулятора необходимо знать параметры технологического объекта управления. Однако в некоторых случаях эти параметры установить не удается— либо это затруднительно, либо объект только проектируется. В подобных случаях можно руководствоваться следующим:
регуляторы релейного действия можно применять в объектах большой емкости и без значительного запаздывания;
П-регуляторы применяют в объектах со средней емкостью и небольшим запаздыванием при плавных изменениях нагрузки. Их обычно используют для регулирования в одноемкостных объектах;
И-регуляторы находят применение в объектах с самовыравниванием, независимо от величины емкости, с небольшим запаздыванием и при плавных изменениях нагрузки;
ПИ-регуляторы используют в объектах любой емкости с большим запаздыванием, но медленными изменениями нагрузки;
ПИД-регуляторы применяют в объектах любой емкости, с большим запаздыванием и при больших и резких колебаниях нагрузки;
импульсные регуляторы применяют в объектах с очень большим запаздыванием.
Статические и динамические характеристики содержат все необходимые сведения об объекте регулирования. По динамической характеристике определяют коэффициент усиления объекта Коб, постоянную времени ТОб и запаздывание  Об. Выбор регулятора с тем или иным законом регулирования обусловлен требованиями к качеству автоматического регулирования.
Об. Выбор регулятора с тем или иным законом регулирования обусловлен требованиями к качеству автоматического регулирования.
Степень воздействия регулятора характеризуется динамическим коэффициентом регулирования RД, представляющим собой отношение максимального отклонения у1 (t) регулируемой величины от заданного значения в процессе регулирования, вызванного однократным ступенчатым возмущением, к отклонению у0 (t) при том же возмущении, но без регулирующего воздействия: RД = [у1 (t)]/[y0 (t)], где у0 (t) = Koбx0.
Наибольший динамический коэффициент имеет место в системе автоматического регулирования с И-регулятором. Меньшее значение динамического коэффициента регулирования будет при применении П- или ПИ-закона регулирования, однако при П-регуляторе наблюдается остаточное отклонение регулируемой величины от
заданного значения. Наименьшее значение динамического коэффициента регулирования может быть достигнуто при использовании ПИД-регулятора.
Величина динамического коэффициента регулирования для одного и того же регулятора зависит от характера переходного процесса. Он всегда максимален для апериодического процесса и убывает по мере увеличения перерегулирования. С увеличением отношения динамический коэффициент регулирования быстро возрастает, стремясь к единице, а эффективность воздействия регулятора на максимальное отклонение при этом снижается.
Другим важным показателем регулирования является продолжительность переходного процесса, которая зависит от характера переходного процесса.
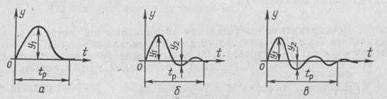
Рис. 67. Типовые процессы регулирования:
а — апериодический с минимальным временем регулирования; 6 — с 20 %-ным перерегулированием; в — с минимальной квадратичной площадью отклонения
Минимальное время регулирования может быть достигнуто при использовании П- и ПИ-регуляторов. Время регулирования ПИ-регулятора примерно вдвое больше, чем П-регулятора. Минимальное время регулирования для П-регулятора объясняется наличием статической ошибки: поскольку регулируемая величина не возвращается к заданному значению, то процесс регулирования заканчивается быстрее.
Оптимальный характер процесса регулирования и необходимые для этого параметры настройки регулятора — понятия относительные. Исходя из условий технологического процесса (требований к его протеканию и качеству продукции), характера возмущений и устройства регулятора, лучшими могут быть признаны различные по своему характеру процессы регулирования.
Для непрерывных технологических процессов деревообработки применимы три оптимальных переходных процесса регулирования.
Апериодический (граничный) процесс (рис. 67, а) характеризуется, помимо минимального общего времени регулирования, отсутствием перерегулирования и минимальным регулирующим воздействием, т. е. минимальным изменением подачи регулирующей среды. Последнее целесообразно в тех случаях, когда регулирующее воздействие для рассматриваемой регулируемой величины может повлиять и на другие регулируемые величины.
Процесс с 20 %-ным перерегулированием (рис. 67, б) рекомендуют в случаях, когда допустима известная ве-
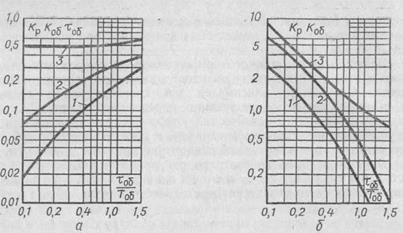
Рис. 68. Номограммы для определения оптимальных параметров настройки И-регулятора (а) и П-регулятора (б) для статических объектов: 1 — апериодический процесс; 2 — процесс с 20 %-ным перерегулированием; 3 — процесс с минимумом квадратичной интегральной оценки качества
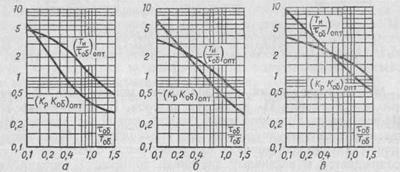
Рис. 69. Номограммы для определения оптимальных параметров настройки ПИ-регулятора для статических объектов:
коэффициент передачи П-, ПИ- и ПИД-регуляторов  постоянная времени изодрома ПИ- и ПИД-регуляторов
постоянная времени изодрома ПИ- и ПИД-регуляторов
|
|
а — апериодический процесс; б — процесс с 20 %-ным перерегулированием; в — процесс с минимумом квадратичной интегральной оценкой качества
|

Рис. 70. Номограмма для определения оптимальных параметров настройки ПИД-регуляторов для статических объектов:
а — апериодический процесс; б — процесс с 20 %-ным перерегулированием; в — процесс с минимумом квадратичной интегральной оценкикачества
личина перерегулирования, снижающего максимальное динамическое отклонение.
Процесс min  y2dt характеризуется наибольшим перерегули-
y2dt характеризуется наибольшим перерегули-
рованием (порядка40—45 %) и временем регулирования, а также максимальным регулирующим воздействием. Однако ему свойственна наименьшая величина максимального динамического отклонения.
Расчет оптимальных параметров настройки регуляторов.Работа регулятора зависит от значений следующих настроечных параметров:
коэффициент передачи регулятора
% хода регулирующего органа
Кр =---------------- —-——---------------------- ; время изодрома
ед. изм. регулируемой величины
Ти, с; время предварения Тп, с.
Оптимальные настройки регулятора определяются по параметрам динамических характеристик технологического объекта управления Коб Тоб и об. Для объектов с соотношением о6/ТОб в диапазоне 0,1—1,0 разработана инженерная методика выбора регулятора и настройки, обеспечивающая один из оптимальных процессов регулирования. Значения оптимальных настроек регулятора могут быть определены с помощью номограмм или приближенно по формулам.
Для определения оптимальных настроек регулятора по номограммам необходимо знать динамические параметры объекта. Тогда значения оптимальных настроек регулятора легко определить по номограммам (рис. 68—70), построенным в логарифмическом масштабе. Пользоваться номограммами не сложно.
В зависимости от отношения об/Тоб для требуемого переходного процесса по номограммам находят некоторые оптимальные значения, являющиеся функцией параметров объекта и регулятора, по которым при известных параметрах объекта определяют оптимальные параметры настройки регулятора, а именно: коэффициент передачи И-регулятора
постоянная времени предварения для ПИД-регуляторов
|
Для определения оптимальных параметров настройки автоматического регулятора, обеспечивающих заданный переходный процесс, разработаны также приближенные формулы. Некоторые из них приведены в табл. 5. Как видно из этой таблицы, для получения оптимальной настройки регулятора необходимо знать динамические параметры объекта управления Коб об Тоб Тогда исходя из заданного оптимального переходного процесса регулирования можно рассчитать необходимые параметры настройки П-, И-, ПИ- и ПИД-регуляторов.
Найденные таким образом параметры настройки регулятора являются лишь исходными при выборе параметров системы регулирования и должны быть уточнены в дальнейшем в процессе эксплуатации.
Таким образом, на первом этапе настройки определяют критерии или требования к разрабатываемой системе автоматического регулирования. Такими критериями, кроме безусловного требования устойчивости системы, могут быть: минимальное время регулирования, отсутствие перерегулирования, минимальная ошибка и т. д.
На втором этапе по динамическим характеристикам объекта определяют его параметры и выбирают тип регулятора.
Дата добавления: 2015-07-14; просмотров: 5843;