ЭЛЕМЕНТЫ ПОСТРОЕНИЯ ОПТИМАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
Автоматическая система, которая обеспечивает лучшие показатели качества при заданных реальных условиях работы и ограничениях, называется оптимальной.
Достижение оптимального функционирования АСР во многом определяется тем, как осуществляется управление во времени, какова программа и алгоритм управления. Поэтому для оценки оптимальности систем используют интегральные критерии. В зависимости от принятого критерия оптимальности рассматриваются следующие виды оптимальных систем:
1. Системы, оптимальные по быстродействию,— обеспечивают
минимальное время перехода объекта из одного состояния в дру
гое. В этом случае критерий оптимальности I=tK—tH, где tH и tK—
время начала и конца процесса управления.
Следовательно, в таких системах обеспечивается минимальная длительность процесса управления. Простейший пример — система управления электродвигателем, обеспечивающая минимальное время разгона до заданной частоты вращения с учетом всех имеющихся ограничений.
2. Системы, оптимальные по расходу ресурсов,— обеспечивают
минимум критерия
5. ОПТИМАЛЬНЫЕ ПАРАМЕТРЫ НАСТРОЙКИ РЕГУЛЯТОРОВ ДЛЯ ОБЪЕКТОВ ПЕРВОГО ПОРЯДКА С ЗАПАЗДЫВАНИЕМ
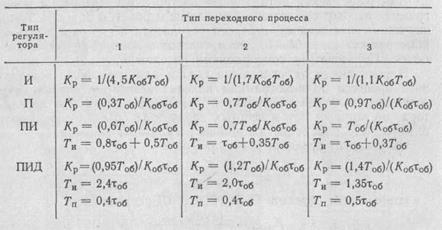
На третьем этапе определяют оптимальные значения параметров настройки регулятора и устанавливают их на реальной аппаратуре. Выбранные параметры настройки регулятора должны обеспечивать требуемое качество работы объекта управления.
На последнем этапе параметры настройки регулятора уточняются и корректируются в процессе эксплуатации системы управления при различных режимах работы технологического объекта.

где К — коэффициент пропорциональности; U (t) — управляющее воздействие. Такие системы управления обеспечивают минимальный расход сырья, энергии и т. д. за все время управления технологическим объектом.
3. Системы оптимальные по точности —обеспечивают минимальные ошибки управления на основании критерия
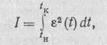
где  (t) — динамическая ошибка.
(t) — динамическая ошибка.
Задача синтеза оптимальной системы автоматического управления обычно формулируется следующим образом. Заданы математическое описание объекта управления, граничные условия, включающие в себя цель управления и ограничения, которые наложены на выходную величину объекта, управляющие воздействия, внешние возмущения и критерий оптимальности. Требуется найти управляющее устройство, обеспечивающее такое управления объектом, при котором цель управления достигается при минимальном значении критерия оптимальности и выполнении всех имеющихся ограничений.
Задача проектирования оптимальной АСР может быть решена простейшим методом перебора всех возможных вариантов. Хотя
такой метод требует больших затрат времени, но современные ЭВМ позволяют им воспользоваться. Для решения задач оптимизации разработаны специальные методы вариационного исчисления (метод максимума, динамическое программирование и др.), позволяющие учесть все ограничения всех реальных систем.
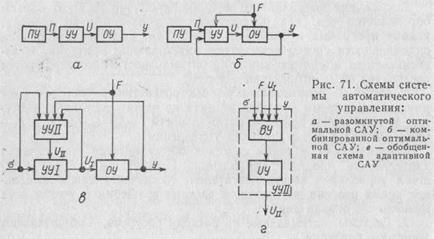
Как и обычные, оптимальные системы бывают разомкнутые, замкнутые и комбинированные. Если оптимальное управление, переводящее объект из начального состояния в конечное и независящее или слабо зависящее от возмущающих воздействий, может быть задано как функция времени U = U (t), то строится разомкнутая система программного управления (рис. 71, а). В программное устройство ПУ закладывают оптимальную программу П, рассчитанную на достижение экстремума принятого критерия оптимальности.
По такой схеме осуществляется управление станками с числовым программным управлением и простейшими работами.
Наиболее совершенными, хотя и более сложными, являются комбинированные оптимальные системы (рис. 71, б). В таких системах разомкнутый контур осуществляет оптимальное управление по заданной программе, а замкнутый контур, оптимизированный по минимуму ошибки, отрабатывает отклонения выходных параметров. Используя канал измерения возмущений F, система становится инвариантной относительно множества задающих и возмущающих воздействий.
Для того чтобы реализовать столь совершенную систему управления, необходимо точно и быстро измерять все возмущающие воздействия. Но это далеко не всегда возможно. Гораздо чаще известны только усредненные статистические характеристики возмущений. Во многих случаях даже задающее воздействие поступает в систему с помехами. А так как помеха представляет собой в общем случае случайный процесс, то удается синтезировать только
статистически оптимальную систему. Такая система не будет оптимальной для каждой конкретной реализации процесса управления, но в среднем будет лучшей для всего множества его реализации.
Нередко встречаются объекты управления, у которых статические и динамические характеристики могут меняться в довольно широких пределах совершенно непредвиденно. Часто характеристики объекта известны приблизительно, так же, как и возмущающие воздействия, которые будут действовать в процессе эксплуатации. Обычные АСР здесь непригодны, необходимо, чтобы система в процессе работы сама автоматически получала и использовала для выработки управляющих воздействий недостающую информацию. При этом система должна иметь способность к адаптации путем изменения своих параметров или структуры при изменении характеристик процесса или условий эксплуатации.
Таким образом, адаптивными называют системы, которые решают задачи управления в неопределенных или переменных воздействиях или параметрах объекта управления путем автоматической настройки. Фактическая возможность адаптации есть возможность автоматического управления автоматической системой. Поэтому в схеме адаптивной системы автоматического управления (рис. 71, в, г) появляется дополнительное устройство управления второго уровня УУII. Устройство управления первого уровня УУI в совокупности с объектом управления ОУ образует обычную АСР, но допускает возможность перестройки. Задачу УУII можно условно разбить на две части. В начале оно собирает информацию о работе основного контура управления, анализирует задающие и возмущающие воздействия (задача идентификации), а затем вырабатывает управляющее воздействие UII (задача автоматической настройки). Управление первым контуром производится на основании критерия качества I его работы, подобного критерия оптимальности. Как и в неадаптивных системах, задачей управления может быть стабилизация или оптимизация этого критерия. Соответственно можно выделить адаптивные системы со стабилизацией и оптимизацией качества управления.
Дата добавления: 2015-07-14; просмотров: 2229;