Математический аппарат исследования дискретных систем
Величины, описывающие поведение автоматических систем, представляют собой функции времени. Математическое исследование дискретных систем существенно упрощается в том случае, когда все величины рассматриваются в дискретные равноотстоящие моменты времени.
Решетчатые функции и разностные уравнения.Решетчатая функция времени x[nT], или в сокращенной записи x[n] - это математическая функция, значения которой определены в дискретные равноотстоящие друг от друга моменты времени t = nT, где n - целое положительное число 0, 1, 2 ..., а Т - период дискретности. То есть решетчатая функция представляет собой числовую последовательность:
x[0], x[1T], x[2T], x[3T], ... , x[kT], ... .
Если период дискретности T задан, то решетчатая функция однозначно формируется из исходной непрерывной. Операция замены непрерывной функции решетчатой
 (1.2)
(1.2)
показана на рис. 1.3.
Обратная задача - формирование непрерывной функции из решетчатой - не может быть решена однозначно без дополнительных сведений о поведении функции в интервале между точками t = nT, так как функции, заданной в дискретные моменты времени, может соответствовать бесконечное множество непрерывных функций.
Возникает вопрос, при каких условиях возможно точное восстановление квантованной функции. Ответ на него дает теорема Котельникова-Шеннона [5]: непрерывный сигнал x(t), частотный спектр которого ограничен полосой 0 < f < fп, полностью определяется последовательностью своих дискретных значений, если период повторения Т этих значений удовлетворяет условию
Т <  или Т <
или Т <  , (1.3)
, (1.3)
где fп[Гц], wп [с-1] - частота пропускания.
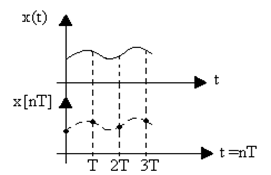
Рис. 1.3.Временные диаграммы изменения непрерывной функции x(t)
и решетчатой функции x[nT]
Смещенная решетчатая функция времени представляет собой числовую последовательность:
x[sT], x[1T+sT], x[2T+sT], x[3T+sT], ... , x[kT+sT], ... ,
образованную в результате выборки значений функции x(t) в точках t = nT+sT оси времени
 , (1.4)
, (1.4)
где s - постоянное число из интервала 0 £ s < 1.
Параметр s рассматривается в качестве относительного (безразмерного) времени, отсчитываемого от начала очередного (n-го) интервала повторения. Его иногда называют локальным (местным) временем.
Смещенная решетчатая функция x[n,s] для всех возможных значений s позволяет однозначно восстановить “породившую” ее непрерывную функцию x(t).
Своего рода “дискретными аналогами” производных и интегралов непрерывных функций для решетчатых функций являются конечные разности и суммы.
Конечные разности решетчатых функций бывают двух видов: прямые (упреждающие) и обратные (отстающие).
Первая прямая разность
Dx[n,s]=x[n+1,s]-x[n,s] (1.5)
и первая обратная разность
Ñx[n,s]=x[n,s]-x[n-1,s]. (1.6)
Разности произвольного порядка k определяются при помощи рекуррентных соотношений:
Dk x[n,s] = D{Dk-1 x[n,s]}= Dk-1 x[n+1,s] - Dk-1 x[n,s], (1.7)
Ñk x[n,s] = Ñ{Ñk-1 x[n,s]}= Ñk-1 x[n,s] - Ñk-1 x[n-1,s] (1.8)
или формул общего вида
 , (1.9)
, (1.9)
 , (1.10)
, (1.10)
где биноминальные коэффициенты (число сочетаний)
 . (1.11)
. (1.11)
Прямая и обратная разности связаны соотношением
Ñk x[n,s] = Dk x[n-k,s]. (1.12)
Соотношения (1.9) и (1.10) показывают, что для вычисления разности k-го порядка в некоторой точке [n,s] требуется знать значение функции x[n,s] в (k+1)-й точке. Для прямой разности этими значениями являются текущее x[n,s] и последующие x[n+1,s], x[n+2,s], ..., x[n+k,s] значения; вычисление обратной разности требует знания предыдущих x[n-1,s], x[n-2,s], ..., x[n-k,s] значений последовательности x[n,s].
Обратные разности обладают важной особенностью. Если решетчатая функция определена только для положительных значений аргумента, т.е. x[n,s] º 0 при n < 0, то, как следует из (1.10), в точке n = 0 k-я разность
Ñk x[0,s] = x[0,s] (1.13)
для любого целого положительного k.
Аналогами интеграла непрерывной функции в пределах от 0 до t для решетчатой являются неполная сумма
 (1.14)
(1.14)
и полная сумма
 (1.15)
(1.15)
Отличие (1.15) от (1.14) заключается в том, что значение x[n,s] в момент времени t = nT + sT также участвует в формировании результата.
Разностные уравнения (уравнения в конечных разностях) связывают между собой решетчатые функции и их конечные разности. При использовании прямых разностей неоднородные линейные разностные уравнения m-го порядка имеют вид [2]
b0Dmy[n,s] + b1Dm-1y[n,s] + ... + bm-1Dy[n,s] +bmy[n,s] = f[n,s], (1.16)
где f[n,s] - заданная, а y[n,s] - искомая решетчатые функции. При f[n,s] º 0 уравнение (1.16) становится однородным разностным уравнением, решением которого будет y[n,s].
При использовании (1.9) разностное уравнение (1.16) можно записать в другом виде:
a0y[n+m,s] + a1y[n+m-1,s] + ... + amy[n,s] = f[n,s]. (1.17)
Коэффициенты этого уравнения определяются
 , (1.18)
, (1.18)
где биноминальные коэффициенты (число сочетаний)
 . (1.19)
. (1.19)
При использовании обратных разностей неоднородные линейные разностные уравнения m-го порядка будут
b0Ñmy[n,s] + b1Ñm-1y[n,s] + ... + bm-1Ñy[n,s] +bmy[n,s] = f[n,s]. (1.20)
С учетом (1.10) последнее выражение приобретает вид
a0y[n,s] + a1y[n-1,s] + ... + amy[n-m,s] = f[n,s]. (1.21)
Коэффициенты этого уравнения определяются
 , (1.22)
, (1.22)
где биноминальные коэффициенты (число сочетаний)
. (1.23)
Разностные уравнения можно рассматривать как рекуррентные соотношения, позволяющие вычислять значения y[n+m,s] при n = 0, 1, 2, ... для уравнения (1.17) и заданных начальных значений y[0,s], y[1,s], ..., y[m-1,s] или значения y[n,s] при n = 0, 1, 2, ... для уравнения (1.21) и заданных начальных значений y[n-m,s], y[n-m+1,s], ..., y[n-1,s].
Решение уравнения (1.21) при s = 0 представляет собой рекуррентную формулу:
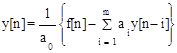 , для n=0, 1, 2, ... (1.24)
, для n=0, 1, 2, ... (1.24)
при нулевых начальных условиях y[n] º 0 при n < 0. Структурная схема решения приведена на рис. 1.4.
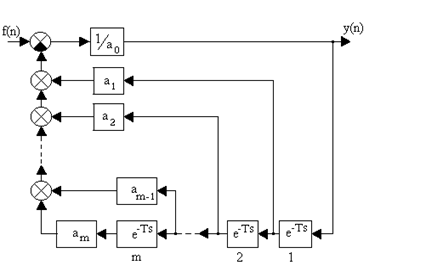 Рис. 1.4.Структурная схема решения разностного уравнения
Рис. 1.4.Структурная схема решения разностного уравнения
Общее решение однородного разностного уравнения при некратных корнях характеристического уравнения может быть записано следующим образом:
y[n,s] =  , (1.25)
, (1.25)
где zi - корни характеристического уравнения
a0 zm + a1zm-1 + ... + am = 0, (1.26)
Ci - постоянные коэффициенты.
Для получения возможности исследования решений разностных уравнений в общем виде широко используются дискретное преобразование Лапласа, z-преобразование, w-преобразование, а также частотные методы.
Z - преобразование. Подобно тому, как применение преобразования Лапласа к линейным дифференциальным уравнениям дало возможность получить удобную методику анализа непрерывных систем, для дискретных систем также был разработан ряд специальных преобразований. Из них наибольшее распространение получили дискретное пребразование Лапласа, введенное в 1949 г. Я.З.Цыпкиным [18], и z-преобразование, предложенное в конце 40-х годов Штибицем и Шенноном.
Z-пребразованием решетчатой функции x[nT] называется функция комплексного аргумента z, определяемая выражением
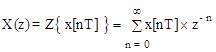 (1.27)
(1.27)
при çzô>R=1/r , где r - радиус сходимости ряда.
Функция x[nT] называется оригиналом, а функция X(z) - изображением или z-пребразованием функции x[nT].
Преобразование, в котором z = esT, было введено Я.З.Цыпкиным под названием “дискретное преобразование Лапласа”.
Z-пребразование (1.27) дает возможность получить из X(z) значение ординат решетчатой функции x[nT] в моменты квантования. Но в системах управления с непрерывными динамическими частями процесс непрерывен и между моментами n = 0, 1, 2 ... Для нахождения этих ординат необходимо рассмотреть последовательности для других дискретных моментов с тем же интервалом повторения, но смещенных на значение sT: t = (n+s)T при 0 £ s £ 1. Это можно делать с помощью модифицированного z-преобразования.
Модифицированное z-преобразование решетчатой функции x[nT+sT]:
 . (1.28)
. (1.28)
Функция X(z,s), определяемая выражением (1.28), называется z-преобразованием непрерывной функции времени x(t) и обозначается как
X(z,s) = Zs {x(t)}; (1.29)
z-преобразование функции x(t) можно также представить следующим образом:
X(z,s) = Zs {X(s)}, (1.30)
где X(s) - преобразование Лапласа от x(t). В этом случае подразумевается, что преобразованию подвергается функция времени и запись (1.30) носит чисто формальный характер.
Т а б л и ц а 1. 1
Дата добавления: 2015-06-01; просмотров: 1755;