Вибір закону регулювання
При створенні системи автоматичного регулювання застосовується принцип регулювання за відхиленням (рис. 3.1). Вибір закону регулювання грунтується на основі вимог до якості процесу регулювання (див. п. 2.1.2). В першу чергу оцінюється можливість розроблення одноконтурної САР з використанням лінійних стандартних регуляторів, що реалізують П-, ПІ- або ПІД-закони регулювання.
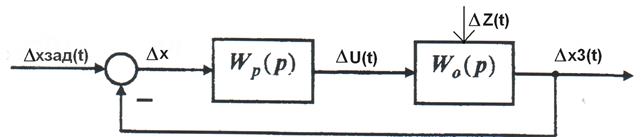
Рис. 3.1. Структурна схема одноконтурної АСР
за відхиленням
Зображення за Лапласом регульованої величини  , а також похибки регулювання
, а також похибки регулювання  отримують із співвідношень [3, 4, 7]:
отримують із співвідношень [3, 4, 7]:
 , (3.1)
, (3.1)
 . (3.2)
. (3.2)
де  – зображення за Лапласом заданого значення регульованої величини;
– зображення за Лапласом заданого значення регульованої величини;  – передаточні функції об’єкта за каналами управління та збурень;
– передаточні функції об’єкта за каналами управління та збурень;  – передаточна функція регулятора.
– передаточна функція регулятора.
Синтез САР починається із створення системи із застосуванням П-регулятора. Спочатку перевіряється відповідність статичної похибки системи її заданому значенню.
Похибка регулювання (розузгодження) в АСР має дві складові:
 , (3.3)
, (3.3)
де  – похибка відтворення завдання;
– похибка відтворення завдання;  – похибка, створювана збуренням.
– похибка, створювана збуренням.
За кількох збурень похибка має відповідно кілька доданків. Значення статичної похибки  вибирається згідно варіанту із додатку 2. Якщо
вибирається згідно варіанту із додатку 2. Якщо  , то додається складова похибки відтворення завдання.
, то додається складова похибки відтворення завдання.
Отже, для визначення статичної похибки системи потрібно спочатку підставити значення  у відповідні передаточні функції об’єкта та регулятора, які входять до формули (3.2). Підстановка рівнозначна рівності нулю всіх похідних, тобто статичному режиму роботи системи.
у відповідні передаточні функції об’єкта та регулятора, які входять до формули (3.2). Підстановка рівнозначна рівності нулю всіх похідних, тобто статичному режиму роботи системи.
Для системи стабілізації похибку відтворення завдання приймають рівною нулю  .
.
Одноконтурна система стабілізації температури складається з об’єкта, описуваного системою рівнянь (2.2), та пропорційного регулятора. На об’єкт діють два ступінчасті (стрибкоподібні) збурення 
Передаточні функції за каналом управління та збурень відповідають виразам (2.7…2.9).
Визначити коефіцієнт передачі регулятора, за якого статична похибка регулювання не перевищить за модулем  .
.
Приймаємо передаточну функцію регулятора  .
.
Значення модуля статичної похибки  визначається за виразом (3.2) з урахуванням
визначається за виразом (3.2) з урахуванням  . За цих умов отримаємо мінімальне значення
. За цих умов отримаємо мінімальне значення  , за якого статична похибка буде дорівнювати
, за якого статична похибка буде дорівнювати  :
:
 ; (3.4)
; (3.4)
 ,
,
звідки 
Можна зробити висновок, що при значеннях  статична похибка за модулем не буде перевищувати
статична похибка за модулем не буде перевищувати  .
.
У випадку, коли статична похибка неприпустима, створюється системи стабілізації (використовується регулятор з астатичною складовою – ПІ- або ПІД-регулятор).
В даній курсовій роботі створюється система стабілізації.
Дата добавления: 2014-12-01; просмотров: 1910;