Цифрові системи управління
У зв'язку з бурхливим розвитком мікроелектроніки і мікропроцесорів цифрові обчислювальні пристрої знаходять все більше застосування при розробці керуючих пристроїв. Тому в даний час цифрові системи управління широко поширені. Якщо цифровий пристрій оперує з числовим уявленням із значною кількістю розрядів, то квантуванням по рівню можна нехтувати. І системи управління з такими цифровими пристроями можна розглядати як АІМ-системи.
Цифрова система управління (ЦСУ) включає об'єкт управління (ОУ), чутливі елементи (ЧЕ), аналого-цифровий перетворювач (АЦП), цифровий обчислювальний пристрій (ЦОП) і цифро-аналоговий перетворювач (ЦАП) (рис. 21.1).

Рис. 21.1. Функціональна схема ЦСУ
АЦП перетворить аналоговий сигнал в цифровий, а ЦАП – цифровий сигнал в аналоговий. ЦОП виконує всі необхідні обчислення відповідно до заданого алгоритму управління.
Якщо нехтувати квантуванням по рівню, цифрову систему управління можна представити у вигляді блок-схеми (рис. 21.2), що складається з переривника, дискретного фільтру (ДФ), фіксатора нульового порядку (ФНП) і безперервної частини (БЧ).
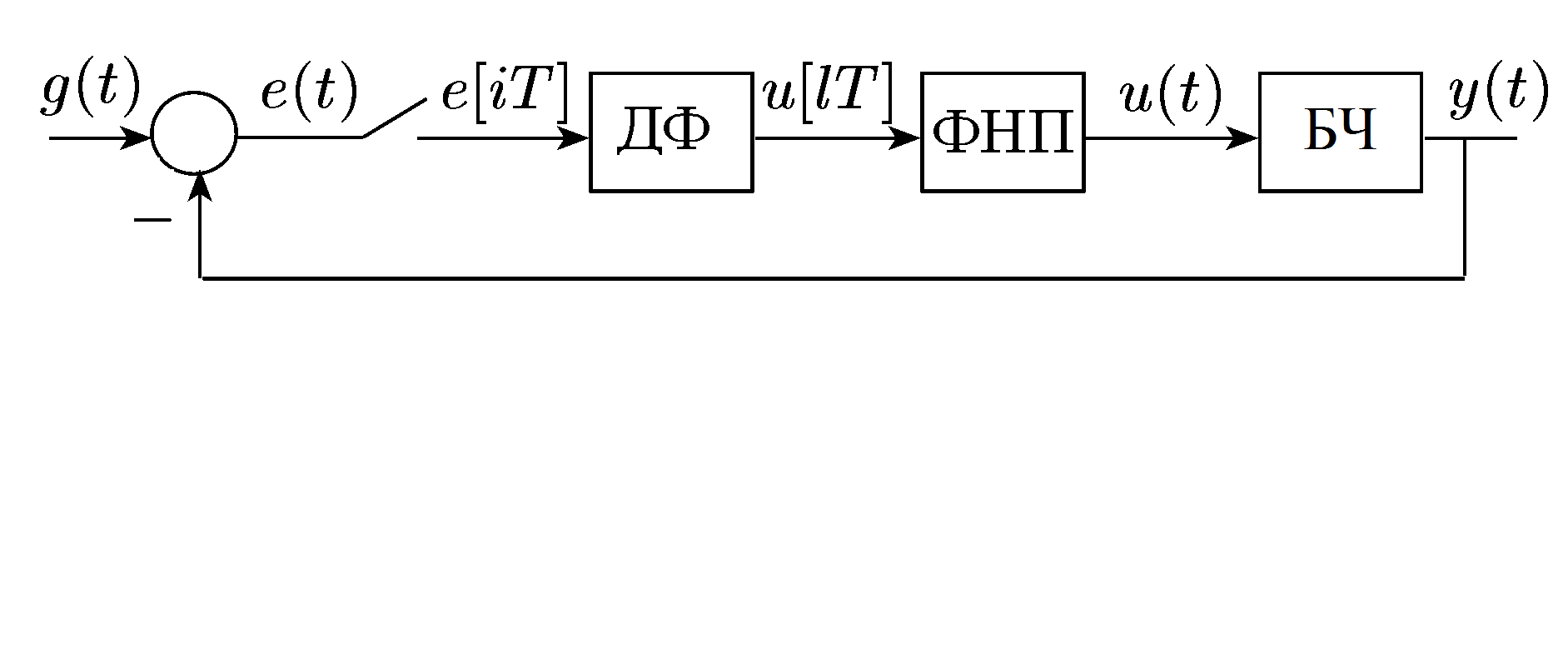
Рис. 21.2. Блок-схема ЦСУ
Переривник є моделью АЦП і перетворить безперервний сигнал  у дискретний сигнал
у дискретний сигнал  . Надалі переривник в явному вигляді на схемі не указуватимемо, приймаючи, що він входить до складу ДФ.
. Надалі переривник в явному вигляді на схемі не указуватимемо, приймаючи, що він входить до складу ДФ.
Дискретним фільтром є модель ЦОП і характеризується дискретною передаточною функцією – передаточною функцією регулятора.
У якості ЦАП найчастіше використовується фіксатор нульового порядку – елемент, який запам'ятовує вхідний дискретний сигнал на один період, – до приходу наступного дискретного сигналу. Таким чином, він перетворить вхідний сигнал, що представляє гратчасту функцію, в ступінчастий сигнал.
Фіксатор нульового порядку можна розглядати як АІМ-елемент, що виробляє прямокутні імпульси тривалості  (відносна тривалість
(відносна тривалість  ) і з амплітудою
) і з амплітудою  .
.
Представивши ФНП у вигляді еквівалентної схеми, що складається з простого імпульсного елементу і формуючої ланки, отримаємо еквівалентну схему цифрової системи управління (рис. 21.3). На цій схемі  – передаточна функція (у операторній формі) дискретного фільтру (регулятора)
– передаточна функція (у операторній формі) дискретного фільтру (регулятора)  – передаточна функція ПБЧ.
– передаточна функція ПБЧ.
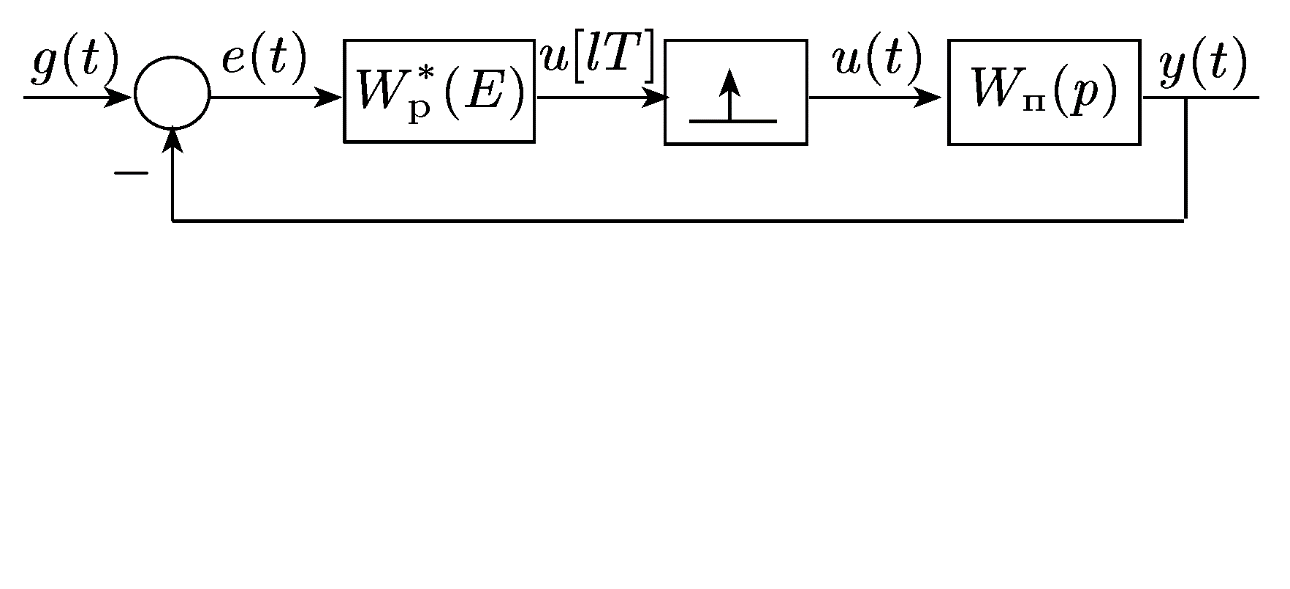
Рис. 21.3. Еквівалентна структурна схема ЦСУ
Передаточна функція (у зображеннях Лапласа) формуючої ланки має вигляд
|
Тому передаточна функція (у зображеннях Лапласа) ПБЧ є

|
Дискретна передаточна функція ПБЧ має вигляд

|
або

| (21.1) |
Використовуючи цю передаточну функцію, можна побудувати структурну схему дискретної моделі цифрової системи управління (рис. 21.4).
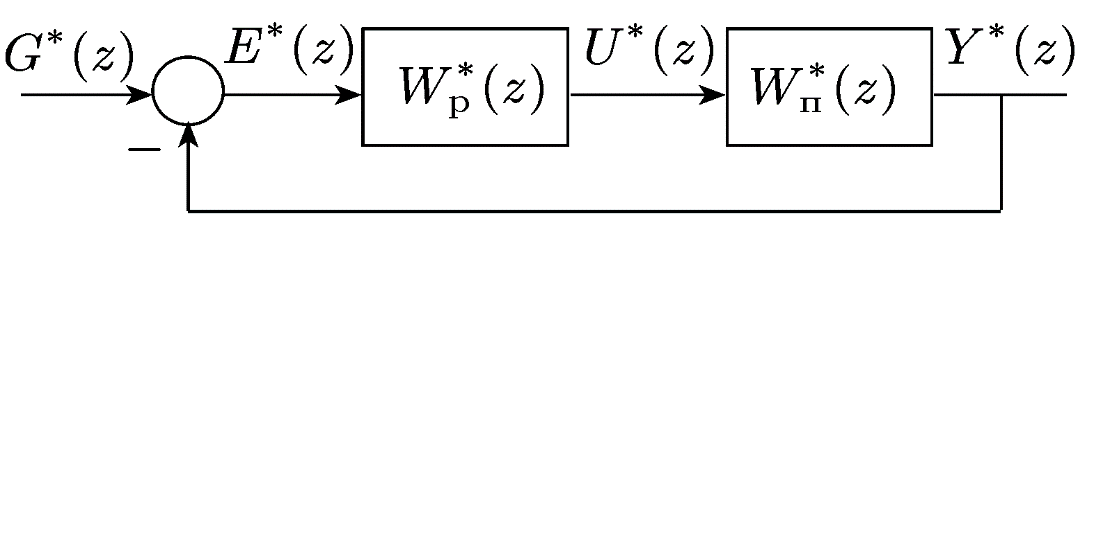
Рис. 21.4. Дискретна модель ЦСУ
По цій структурній схемі передаточні функції замкнутої системи визначаються по відомих з теорії безперервних систем правилам. Передаточні функції щодо входу  і виходів
і виходів  і
і  рівні
рівні
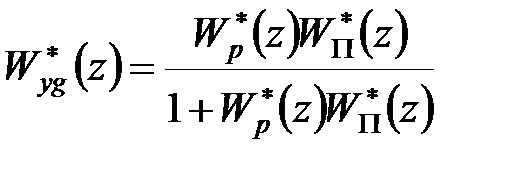 , , 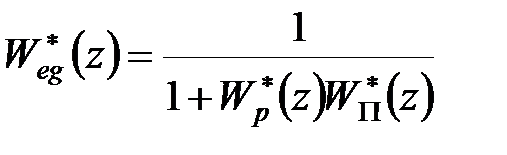
|
Приклад 21.1. Дана цифрова система управління, у якої передаточна функція безперервної частини  й цифровий обчислювальний пристрій реалізує алгоритм управління, обумовлений різницевим рівнянням
й цифровий обчислювальний пристрій реалізує алгоритм управління, обумовлений різницевим рівнянням  . Потрібно визначити передаточну функцію даної системи щодо входу
. Потрібно визначити передаточну функцію даної системи щодо входу  й виходу
й виходу  .
.
Запишемо рівняння регулятора в операторній формі
 . .
|
Звідси передаточна функція регулятора в операторній формі має вигляд
 , ,
|
і, в  -зображеннях,
-зображеннях,
 . .
|
Передаточна функція приведеної безперервної частини є
 . .
|
Дискретна передаточна функція ПНЧ
 . .
|
Коренями полінома  є
є  й
й  . Тоді
. Тоді
 . .
|
Отже,
 .
.
Шукана передаточна функція замкненої системи має вигляд
 .
.
Дата добавления: 2017-08-01; просмотров: 323;