Дискретна модель АІМ-системи
Позначивши вагову функцію ПБЧ через  маємо (см. рис. 20.3, б)
маємо (см. рис. 20.3, б)
| (20.7) |
Підставивши вираз для  з (20.4), після інтегрування отримаємо
з (20.4), після інтегрування отримаємо
| (20.8) |
З цього рівняння виходить, що вихідна змінна  залежить від
залежить від  , тобто від значень
, тобто від значень  у дискретні моменти часу
у дискретні моменти часу  Для
Для  маємо
маємо
 . .
| (20.9) |
У будь-який момент часу АІМ-система описується рівняннями (20.8) і (20.9). У рівняння (20.8) входять безперервні функції (функції з безперервними аргументами) і  , а також дискретна функція . У рівняння (20.9) входять тільки дискретні функції. Таким чином, АІМ-система є безперервно-дискретною системою. І те, що вона описується рівняннями, в які входять дискретні і безперервні функції, доставляє незручність. Від цієї незручності можна позбавиться, якщо обмежитися дослідженням АІМ-системи тільки в дискретні моменти часу
, а також дискретна функція . У рівняння (20.9) входять тільки дискретні функції. Таким чином, АІМ-система є безперервно-дискретною системою. І те, що вона описується рівняннями, в які входять дискретні і безперервні функції, доставляє незручність. Від цієї незручності можна позбавиться, якщо обмежитися дослідженням АІМ-системи тільки в дискретні моменти часу  .
.
Дійсно, підставивши в (20.8)  отримаємо
отримаємо
|
або, враховуючи, що  при
при 
| (20.10) |
Рівняння (20.9) і (20.10) описують процеси в АІМ-системі в дискретні моменти часу і представляють її дискретну модель. Як побачимо далі, по дискретній моделі при необхідності можна визначити значення вихідної змінної не тільки в моменти часу але і в довільні моменти  .
.
Провівши  -перетворення, з рівнянь (20.9) і (20.10) отримаємо
-перетворення, з рівнянь (20.9) і (20.10) отримаємо
| (20.11 а) (20.11 б) |
де
 . .
| (20.12) |
Рівняння (20.11 б) отримане з використанням теореми про згортання.
З рівняння (20.11б) маємо  тобто
тобто  є передаточна функція (у
є передаточна функція (у  -зображеннях) прямому ланцюгу з входоми
-зображеннях) прямому ланцюгу з входоми  і виходом
і виходом  .
.
На підставі рівнянь (20.11а), (20.11 б) можна побудувати структурну схему дискретної моделі АІМ-систем (рис. 20.4).
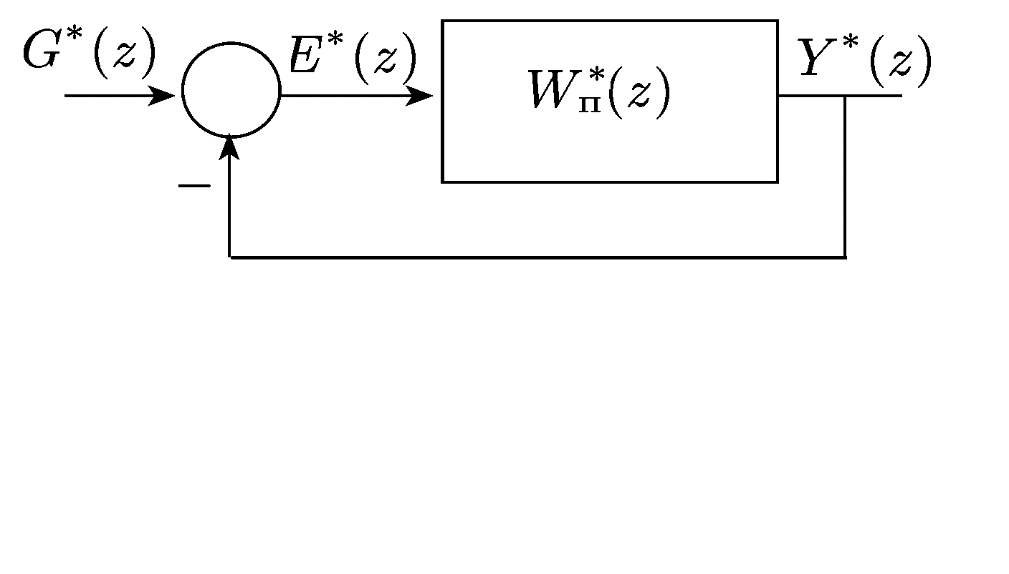
Рис. 20.4. Дискретна модель АІМ-системи
Передаточна функція замкнутої дискретної системи по цій структурній схемі визначається так само, як і у разі безперервних систем. Так, наприклад, передаточна функція щодо входу  і виходу
і виходу  має вигляд
має вигляд
 , ,
|
а щодо входу і виходу 
 , ,
|
Основна особливість розрахунку АІМ-системи полягає в обчисленні передаточної функції  по відомій передаточній функції ПБЧ
по відомій передаточній функції ПБЧ  , що рівнює добутку передаточних функцій формуючої ланки і безперервної частини.
, що рівнює добутку передаточних функцій формуючої ланки і безперервної частини.
Згідно формулі (20.11) є  -зображення вагової функції ПБЧ
-зображення вагової функції ПБЧ  . Вагову функцію
. Вагову функцію  можна отримати шляхом дискретизації за часом безперервної вагової функції
можна отримати шляхом дискретизації за часом безперервної вагової функції  яка виходить з передаточної функції
яка виходить з передаточної функції  .
.
Знаючи зв'язок між зображенням Лапласа безперервної функції і z-зображенням відповідної гратчастої функції, можна безпосередньо по  визначити .
визначити .
Введемо в розгляд оператор  який кожній функції
який кожній функції  ставить у відповідність функцію
ставить у відповідність функцію 
Оператор відповідає трем послідовним операціям: зворотному перетворенню Лапласа, квантуванню за часом і  -перетворенню. Оскільки всі три вказані операції є лінійними, то оператор є лінійним. Використовуючи цей оператор, передаточну функцію можна визначити таким чином:
-перетворенню. Оскільки всі три вказані операції є лінійними, то оператор є лінійним. Використовуючи цей оператор, передаточну функцію можна визначити таким чином:
 . .
| (20.13) |
Далі також використовуватимемо оператор  який функції ставить у відповідність модифіковане
який функції ставить у відповідність модифіковане  -зображення
-зображення  :
:
 . .
| (20.14) |
Дата добавления: 2017-08-01; просмотров: 359;