Перетворення структурних схем дискретних систем
При перетворенні структурних схем дискретних систем не можна переносити через дискретний елемент суматор або безперервний елемент (окрім пропорційної ланки). Як було показано вище, дискретно-безперервний фільтр і дискретну ланку можна переставляти місцями. Безперервну частину можна перетворювати по відомих правилах перетворення структурних схем безперервних систем.
Для схем, що складаються тільки з дискретних ланок, справедливі всі правила перетворення структурних схем безперервних систем. Розглянемо систему управління з декількома дискретними елементами з однаковим періодом, еквівалентна схема якої представлена на рис. 21.9, а.
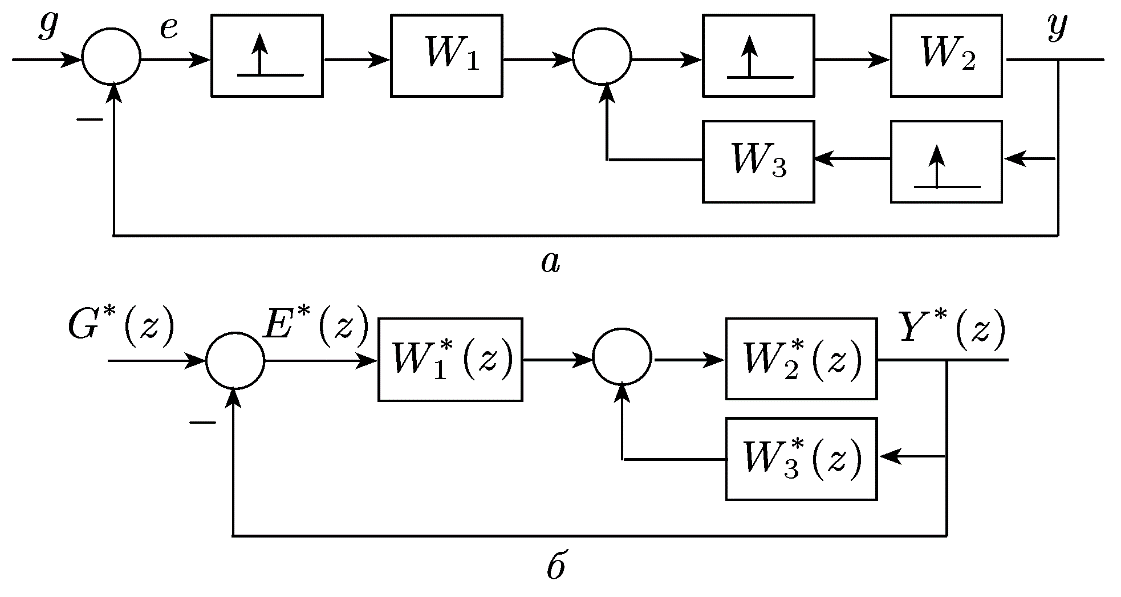
Рис. 21.9. Дискретна модель системи з декількома дискретними елементами:
а – початкова еквівалентна схема; б – структурна схема дискретної моделі
Очевидно, вона може бути перетворена і представлена у вигляді структурної схеми з одними дискретними ланками з передаточними функціями (рис. 21.9, б)
 , ,
|
Коли перед дискретним елементом включений безперервний елемент або до системи, окрім задаючої дії, прикладено збурення і потрібно досліджувати її якість, при перетворенні структурної схеми виникають проблеми, пов'язані з необхідністю перенесення суматора.
У першому випадку (рис. 21.9, а) при перетворенні суматор переноситься через точку знімання сигналу, і в перетвореній схемі (рис. 21.9, б) ця точка відсутня. Тому при визначенні помилки слід виходити з наступних співвідношень.
Помилка в моменти знімання сигналу дорівнює  або, в
або, в  -зображеннях
-зображеннях  де
де

|
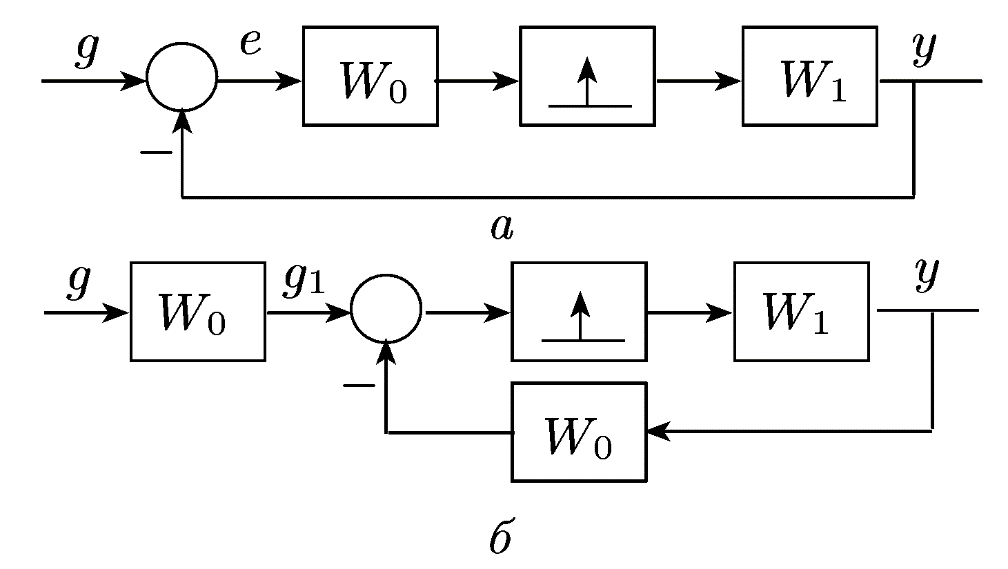
Рис. 21.10. Перетворення структурної схеми з безперервною ланкою перед дискретним елементом: а – початкова схема; б – перетворена схема
У другому випадку (рис. 21.11, а) для визначення реакції на виході і помилки системи від збурення перенесемо суматор, до якого прикладено збурення, через ланку з передаточною функцією  (рис. 21.11, б).
(рис. 21.11, б).
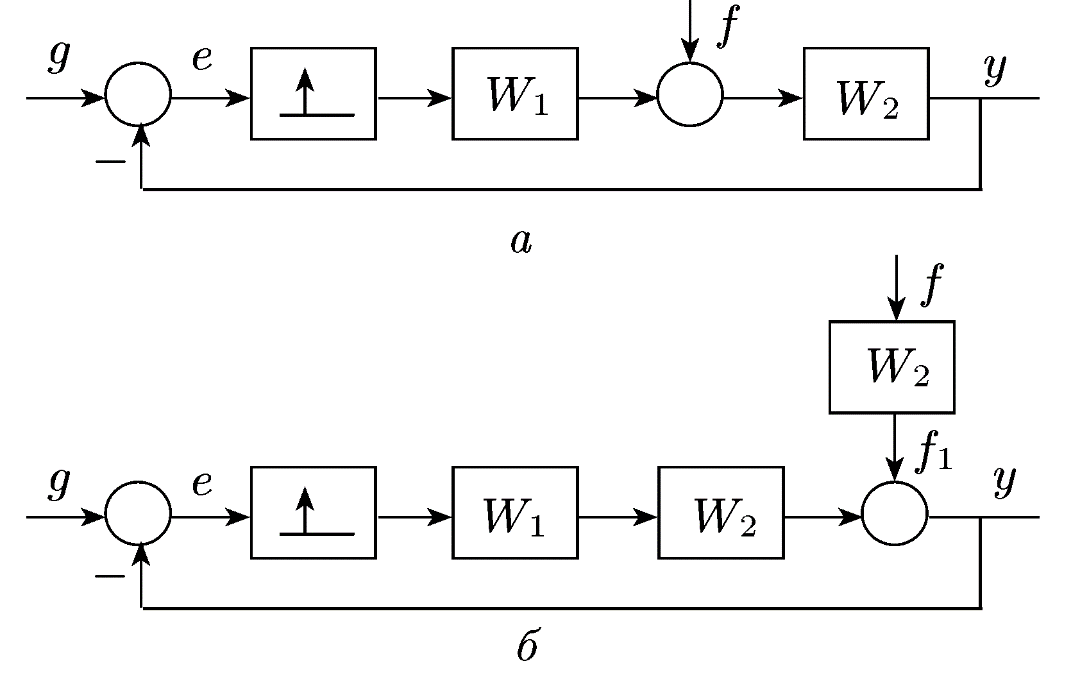
Рис. 21.11. Перетворення з перенесенням збурення:
а – початкова схема; б – перетворена схема
Реакція системи на збурюючу дію визначається з наступних співвідношень:
 , ,
|
Помилки від задаючої дії і збурення рівні відповідно

|
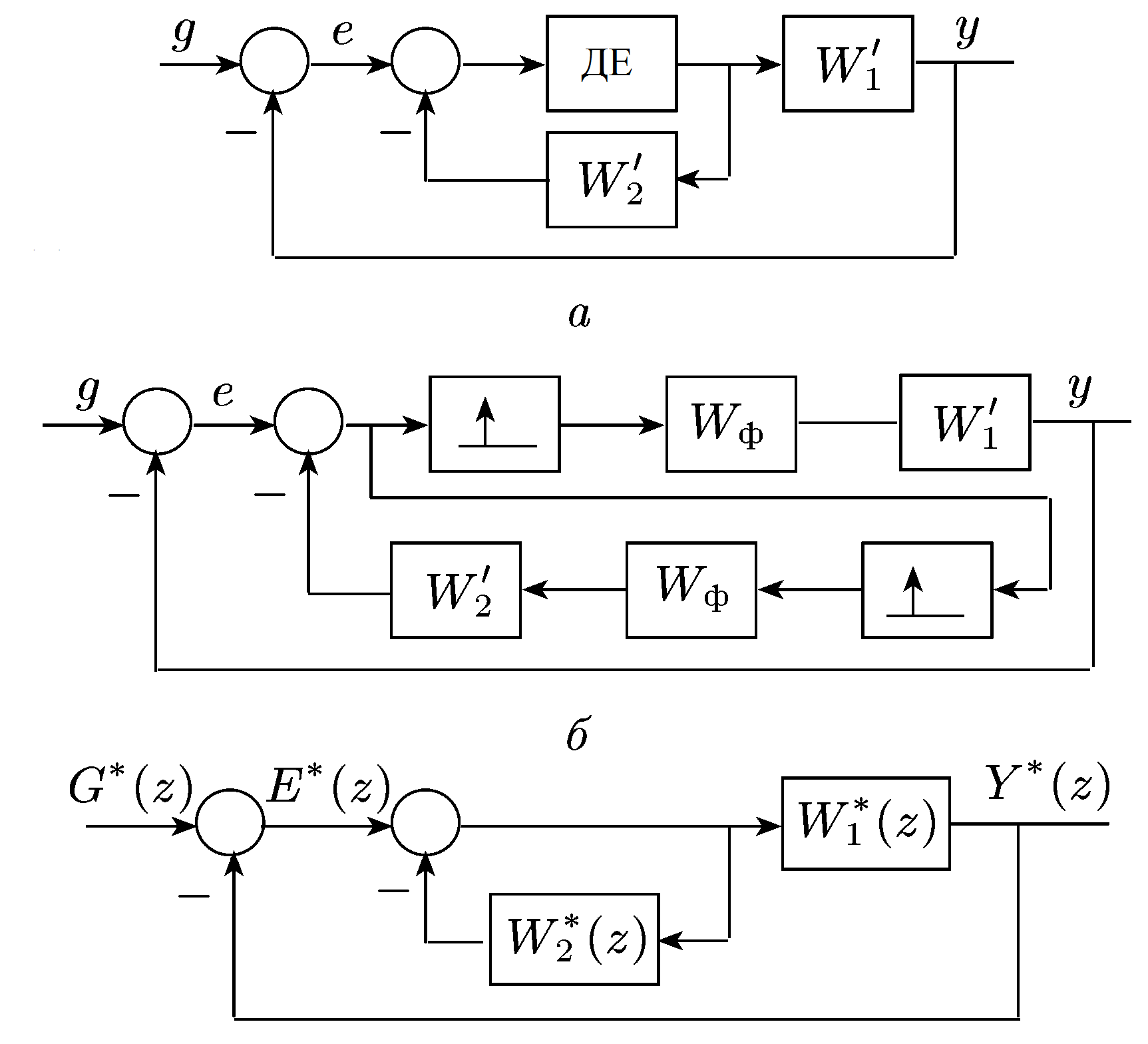
Рис. 21.12. Перетворення дискретного елементу, охопленого зворотним зв'язком:
а – початкова схема; б – перетворена еквівалентна схема;
в – дискретна модель
І нарешті, розглянемо перетворення структурної схеми системи управління, в якій дискретний елемент охоплений зворотним зв'язком з безперервною ланкою (рис. 21.12, а). Замінимо дискретний елемент еквівалентною схемою і перенесемо вузол (рис. 21.12,6). З останньої схеми отримуємо дискретну модель системи управління (рис. 21.12, в).
У цій моделі

|
Дата добавления: 2017-08-01; просмотров: 278;