Тема: Двойственный симплексный метод
Двойственный симплексный используется для решения задачи линейного программирования, записанной в форме основной задачи, среди векторов которой имеется m единичных, свободные члены bi принимают любые значения, а система ограничений задана в виде неравенств смысла «≥», либо смешанных неравенств «≥», «≤» и «=».
Если в симплексном методе оптимальный план получается в результате перехода от одного опорного плана к другому, то в двойственном симплексном методе – в результате движения по псевдопланам.
Определение 1. Условно-отимальным планом или псевдопланом называется план, в котором удовлетворяется признак оптимальности (все коэффициенты индексной строки ∆j ≥ 0 при решении задачи на максимум и все ∆j ≤ 0 при решении задачи на минимум целевой функции), а среди значений столбца свободных членов bi имеются отрицательные числа.
Алгоритм двойственного симплексного метода включает следующие этапы:
1. Составление псевдоплана.
Систему ограничений исходной задачи приводим к системе неравенств смысла «≥». Для этого обе части неравенств смысла «≥» умножаем на (−1). Если ограничение исходной задачи задано в виде равенства, необходимо представить его в виде системы двух неравенств противоположного смысла.
От полученной системы неравенств смысла «≤» переходим к системе уравнений, вводя неотрицательные дополнительные переменные, которые становятся базисными. Разрешаем систему уравнений относительно базисных переменных и первый опорный план заносим в симплексную таблицу. Индексную строку таблицы заполняем коэффициентами целевой функции, взятыми с противоположными знаками.
2. Проверка плана на оптимальность.
Если в полученном опорном плане условие оптимальности не выполняется, то осуществляем симплексную процедуру(см.решение задачи ЛП симплексным методом). В этом случае существует следующее правило: при расчете значений столбца q отрицательные значения свободных членов bi делим только на отрицательные коэффициенты направляющего столбца, положительные значения bi - на положительные коэффициенты aik, а в строке, имеющей разноименные знаки bi и aik значения qi не существует.
Если в опорном плане условие оптимальности удовлетворяется и все значения столбца свободных членов bi ≥ 0, то получен оптимальный план. Наличие среди столбца свободных членов хотя бы одного отрицательного числа свидетельствует о получении псевдоплана и требует перехода к следующему этапу алгоритма.
3. Определение направляющих (разрешающих) строки и столбца.
Среди отрицательных значений столбца свободных членов bi выбираем наибольшее по абсолютной величине. Строка, соответствующая этому значению, является направляющей ( i = k ).
Симплексную таблицу дополняем строкой q, в которую заносим результаты деления, взятые по абсолютной величине, коэффициентов индексной строки на соответствующие отрицательные коэффициенты направляющей строки. В столбцах, имеющих значения aik ≥ 0, qj не существует. Столбец с минимальным значением qj является направляющим. Разрешающий элемент, находящийся на пересечении направляющих строки и столбца симплексной таблицы, в двойственном симплексном методе он всегда отрицательный.
4. Определение нового опорного плана.
Новый опорный план получаем в результате пересчета симплексной таблицы методом Жордана-Гаусса и далее переходим к этапу 2 алгоритма.
Решение задачи продолжаем до получения оптимального плана.
Если все коэффициенты направляющей строки положительны, т.е. aik ≥ 0, то задача не имеет решения, так как в этом случае qj , ( 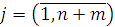 не существует.
не существует.
Пример.
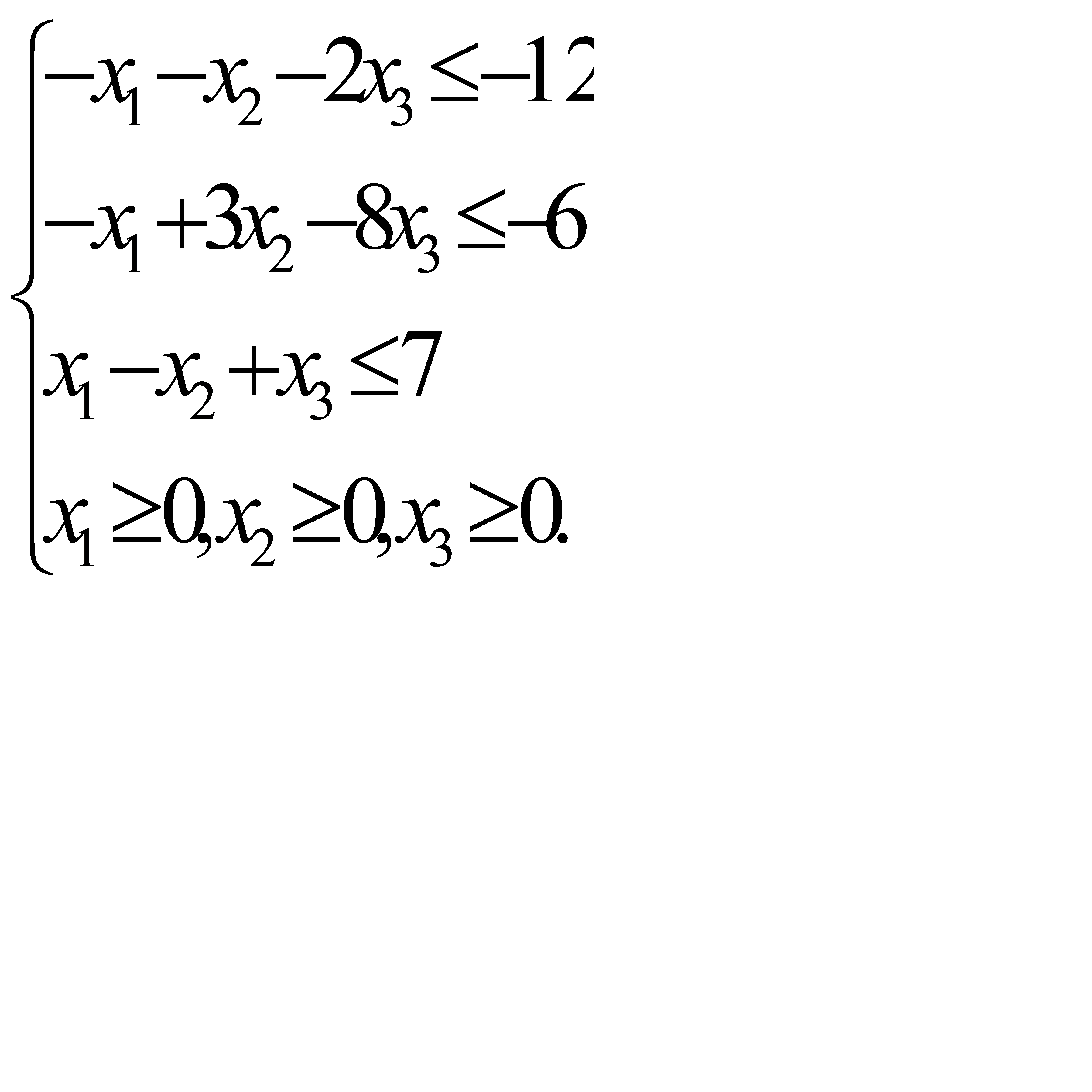
Определить  , который удовлетворяет условиям
, который удовлетворяет условиям
и доставляет максимальное значение целевой функции
 . (4.3)
. (4.3)
Систему ограничений (4.1) приведем к системе неравенств смысла «≤», умножив обе части I и II неравенств на (−1).
Перейдем к системе уравнений:
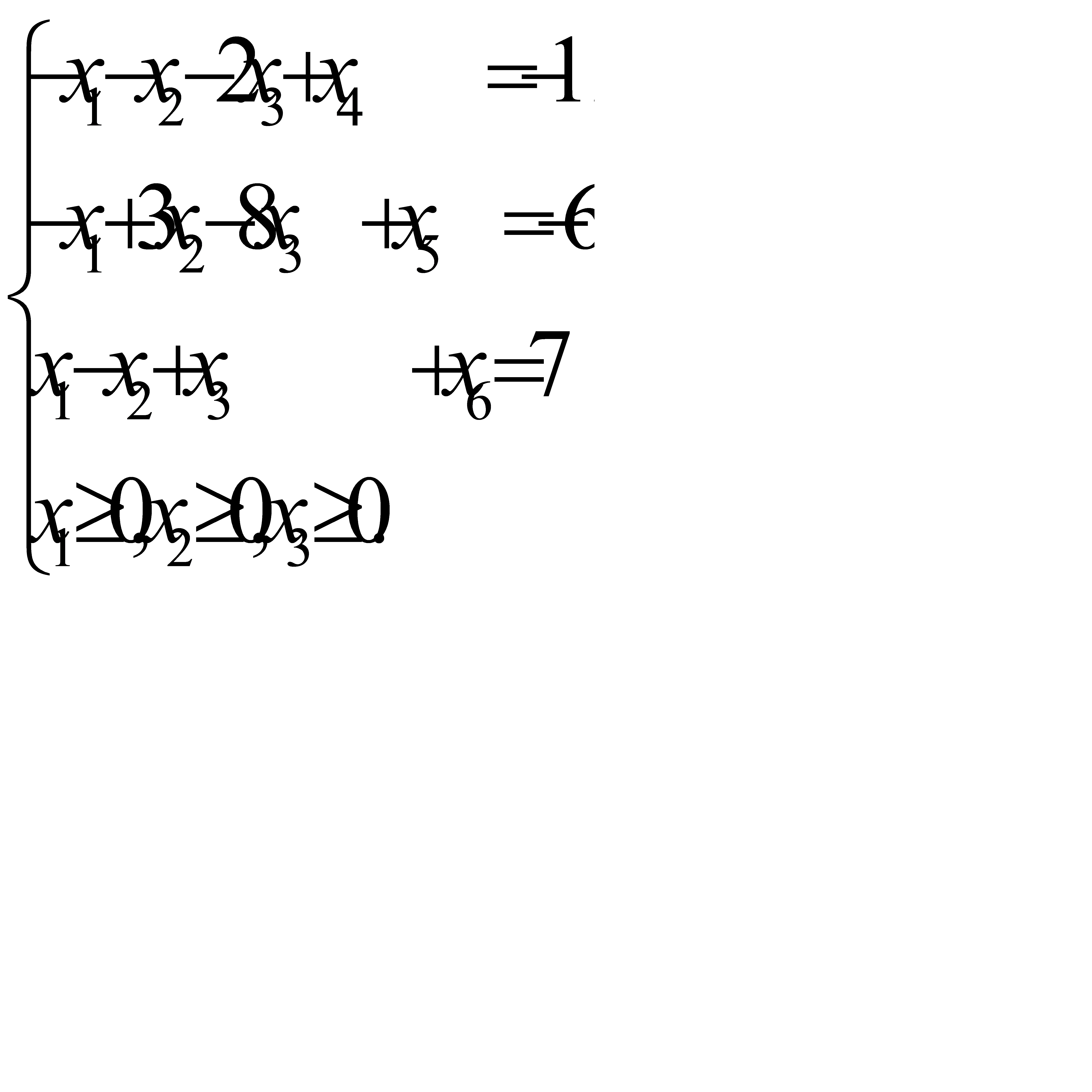 (4.5)
(4.5)
За базис выбираем систему векторов - В системе уравнений А4, А5, А6, так как эти векторы единичные и линейно независимые. Соответствующие единичным векторам переменные  являются базисными.
являются базисными.
Разрешим систему уравнений (4.5) относительно базисных переменных
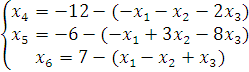 (4.6)
(4.6)
Функцию цели запишем в виде:
 . (4.7)
. (4.7)
Полагая, что свободные переменные  , получим первый опорный план, который заносим в симплексную таблицу 1.
, получим первый опорный план, который заносим в симплексную таблицу 1.
 ,
,  .
.
В таблице 1 псевдоплан или условно-оптимальный план, так как условие оптимальности в индексной строке выполняется, а в столбце свободных членов имеются отрицательные значения. Следовательно, переходим к следующему этапу алгоритма – определению направляющих строки и столбца.
Среди отрицательных значений столбца свободных членов выбираем наибольший по абсолютной величине. Так как |−12| > |−6|, то первая строка, соответствующая переменной  , является направляющей, а переменную нужно вывести из базиса.
, является направляющей, а переменную нужно вывести из базиса.
Для выбора направляющего столбца коэффициенты индексной строки делим на соответствующие отрицательные коэффициенты направляющей строки:  ;
;  ;
;  .
.
Результаты деления, взятые по абсолютной величине, заносим в строку q. Из полученных qj выбираем min{5; 8; 5,5} = 5, которое соответствует первому столбцу с переменной x1. Данный столбец является направляющим, а переменную x1 следует ввести в базис. На пересечении направляющих строки и столбца находится разрешающий элемент, равный (−1). Далее выполняем преобразование симплексной таблицы методом Жордана-Гаусса и заполняем таблицу 2.
Третий опорный план (таблица 3) является оптимальным, так как в индексной строке условие оптимальности выполняется и все значения базисных переменных – положительные числа:
 = (2; 0; 5; 0; 36; 0), L(
= (2; 0; 5; 0; 36; 0), L(  = 135.
= 135.
| Таблица 1 | Базисные переменные | Свободные члены (значения базисных переменных) | x1 | x2 | x3 | x4 | x5 | x6 |
| x4 | −12 | -1 | −1 | −2 | ||||
| x5 | −6 | −1 | −8 | |||||
| x6 | −1 | |||||||
| ||||||||
| q | 5,5 | − | − | − | ||||
| Таблица 2 | x1 | −1 | ||||||
| x5 | −6 | −1 | ||||||
| x6 | −5 | −2 | −1 | |||||
| ||||||||
| q | − | 1,5 | − | − | − | |||
| Таблица 3 | x1 | −3 | −2 | |||||
| x5 | −7 | −6 | ||||||
| x3 | −1 | −1 | ||||||
|
Дата добавления: 2017-05-18; просмотров: 888;