Подсистема датчиков внутренней информации
Представляет собой в основном, преобразователи механических параметров в электрические сигналы. Они собирают и обрабатывают информацию об основных параметрах ПР:
Силовых деформаций (усилия, крутящие моменты), линейных и угловых положениях элементов манипулятора, скоростях и ускорениях звеньев манипулятора.
Для изменения линейных и угловых перемещений манипулятора чаще всего применяют потенциометрические и индукционные (вращающиеся трансформаторы и сельсины) датчики, реже - кодовые и импульсные датчики.
Рассмотрим в качестве примера кодового датчика, преобразующего угол поворота в дискретный код.
Таким датчиком является фотоэлектрический преобразователь считывания (рис.5). Угловое перемещение вала 2 преобразуется в код. На валу жестко закреплен кодированный диск I, представляющий собой стеклянное основание, на которое нанесена кодовая маска,образованная определенным числом концентрических кодовых дорожек с прозрачными для светового потока сегментами (участками).
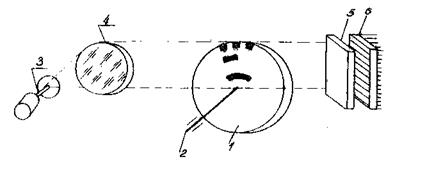
Рисунок 5 - Схема фотоэлектрического преобразователя считывания
Кодовая маска является отображением того двоичного кода, который используется в преобразователе.
Осветитель (лампа 3 и конденсатор 4) формирует световой поток, проходящий через прозрачные сегменты дорожек диска, диафрагму 5 и освещающий фотоприемник 6. В результате каждому углу поворота соответствует определенная комбинация единиц и нулей (освещенные и неосвещенные фотоприемники), являющаяся цифровым кодом данного угла. Разрешающая способность прибора от 5 до 20.
Рассмотрим в качестве примера конструкции руки (схвата) ПР, содержащую сенсорные устройства (датчики). Автоматически действующая, механическая рука ("Рука Эрнста") разработана в США Состоит она из ЭВМ, сервоманипулятора фирмы "Amerikan Machine and Foundry Co" и управляющего устройства. Механическая рука имеет семь степеней подвижности, приводится в движение электродвигателем, снабжена потенциометрами, используемыми в качестве датчиков обратной связи с целью лучшей имитации возможностей живых организмов.
Большое внимание уделено созданию чувств осязания кисти руки (рис.6). На захвате (кисти) руки установлены датчики трех типов: контактные, давления и фотоэлектрические.
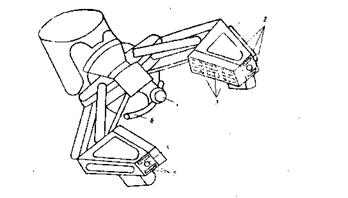
Рисунок 6 - Схема расположения сенсорных элементов механической руки.
Механическая рука состоит из следующих чувствительных элементов: выключателя 1, замыкающегося при соприкосновения с объектом (определяет нахождение объекта между губками),шести контактов 2, замыкающихся при соприкосновении (сигнализирует о контакте о поверхностью губок), шести датчиков давления 3, определяющих положение, захваченного объекта и степень его сжатия, фотодиода 4, реагирующего на темные объекты, двух датчиков давления 5, датчика давления 6, регистрирующего соприкосновение запястья со столом.
Система управления рукой выбирает последовательность включения необходимых электродвигателей и чувствительных элементов для выполнения команд, подаваемых ЭВМ.
Механическая рука решает отдельные логические задачи и принимает самостоятельные решения. Например, если объект манипулирования сместить с отведенного ему места, то рука (точнее система управления руки) производит его поиск и, обнаружив, переносит на прежнее место. ПР оснащенные "рукой Эрнста" имели большое значение, однако для опознавания объектов в их системах использовалась информация, получившая только посредством осязания. При поиске и захвате предмета применен только один метод поиска - сканирующее движение руки в предполагаемой области нахождения объекта манипулирования. Более предпочтительна механическая рука с бинокулярной системой видеодатчиков, оснащенная искусственными органами зрения, опознающими образы нужных предметов.
Лекция 11.
Дата добавления: 2016-10-17; просмотров: 1595;