Подсистема внешней информации
Датчики внешней информации служат для определения состояния среды и контроля параметров объекта манипулирования. К этим датчикам относят: силомоментные, локационные, тактильные, технического зрения, цвета, запаха и другие. Классификация датчиков внешней среды показана на рис.1.

Рисунок 1. - Классификация датчиков внешней информации
Например, простейший случая очувствления ПР состоит в определении факта наличия объекта манипулирования в захвате. Дли этого можно использовать датчик положения или концевые выключатели.
Требования к датчикам: высокая надёжность, невосприимчивость к вибрациям, ударам и изменениям условий окружающей среды (температура, запыленность, влажность и т.д.) взрыво - и пожаробезопасность. Этим требованиям отвечают датчики положения типа КВП, КВД-6М, основанные на использовании гальвано-магнитных эффектов.
Сило-моментные датчики измеряют силы и моменты в захвате, контролирует перегрузку в звеньях манипулятора. Их размещают либо непосредственно в губках захвата, либо между последним звеном манипулятора и захватом. Второй вариант предпочтительнее. Такие датчики при сборке технологического оборудования и трубных соединений или при управлении запорной арматурой позволяют контролировать момент затяжки резьбовых соединений. Они не должны допускать поломок оборудования.
Функционирование сило-моментных датчиков основано на измерении упругих деформаций рабочих органов чувствительными элементами - тензорезисторными, пьезоэлектрическими, емкостными и магнитноупругими преобразователями.
Тензорезисторы бывают проволочные ПКБ, фольговые типа ФКАД к полупродниковые типа КТЭ с базой от 2 до 20 мм.
Для измерения сил деформаций, давлений, получили распространение сило-моментные датчики на основе управляемых пьезоэлектрических резонаторов типа СВК.
Тактильные датчики обеспечивают более высокий уровень интеллекта ПР. Тактильные очувствления включает определение касания объекта, восприятие сжимающей нагрузки, обнаружение проскальзывания и определение усилия.
Тактильное очувствление играет важную роль в сознании средств адаптации ПР, особенно при манипулировании хрупкими или легко деформируемыми предметами (стеклянные емкости, бумажная или этиленовая упаковка), когда невозможна схема жесткого захватывающего устройства.
В настоящее время широкое распространение в качестве тактильных датчиков получила силиконовая резина, обладающая свойством изменения электропроводности, под воздействием механического давления.
Для определения координат робота в пространстве, скорости перемещения его в пространстве относительно технологического оборудования и обнаружения препятствий, используют локационные датчики (ЛД) ближней (ДБЛ) и дальней (ДДЛ) локации.
ДБЛ устанавливают на захватах. Они определяют наличие объекта манипулирования или препятствия на расстоянии нескольких мм от поверхности захвата. ДДЛ дают информацию о внешней среде по всей его рабочей зоне ПР.
По физическому принципу действия локационные устройства могут быть: акустическими, оптическими, электромагнитными, пневматическими и др. ДДЛ могут строиться на использовании ультразвуковых, лазерных и светолокационных датчиков. Ультразвуковые дальномеры определяют расстояние до объекта в диапазоне 0,2 - 2,0 м с погрешностью ± 2 %. Точность определения угловых координат грубее, поскольку облучается большая часть предмета.
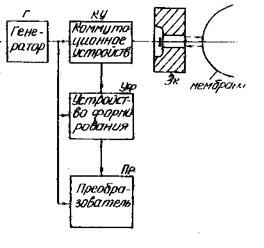
Рисунок 2 - Функциональная схема ультразвукового дальномера;
ЭК - электростатический капсюль
Принцип действия ультразвукового датчика заключается в акустической локации пространства вблизи захватного устройства Время срабатывания датчика не превышает 10 мс. Генератор вырабатывает одиночные короткие электронные импульсы высокого напряжения, поступающие через коммутационное устройство на электрод электростатического капсюля ЭК (рис.2).
Под действием электрического поля мембрана капсюля деформируется, излучая в воздух ультразвуковой импульс, который после отражения от ОМ воспринимается тем же капсюлем. Усиленный с помощью устройства Уфимпульс поступает затем на преобразователь ПР, формирующий импульс, длительность которого пропорциональна расстоянию до отраженной поверхности.
По назначению локационные датчики подразделяют на информационные (определяют положение ПР в пространстве), формирования сигналов управления ПР, а также датчики безопасности (упреждение столкновения ПР с .препятствием).
Электромагнитные ЛД используют для выявления дефектов (поиск поверхностных и подповерхностных трещин любой ориентации) и определение геометрических размеров изделий (металлических) и т.д.
Если затруднено использование оптических средств (запыленность среды, наличие паров) приоритет отдают акустическим датчикам.
Пневматические (струйные) локационные датчики.
Их работа основана на взаимодействии потока воздуха, вытекающего из питающего (формирующего) сопла с объектом. С помощью струйных датчиков позицирование объекта манипулирования определяется с точностью 0,02-0,04 мм в рабочем диапазоне расстояний: 0-5 мм.
Рассмотрим устройство струйного датчика типа "сопло-заслонка" (рис.3).
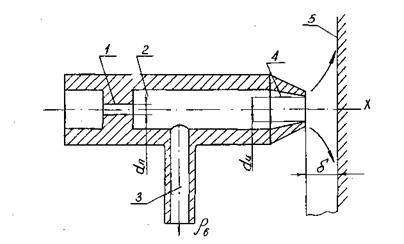
Рисунок 3 - Схема струйного датчика типа "сопло-заслонка":
 - подводимый сжатый воздух,
- подводимый сжатый воздух,  - давление воздуха в камере;
- давление воздуха в камере;
 -давление воздуха на выходе.
-давление воздуха на выходе.
Датчик "Сопло-заслонка" включает питающее сопло I, межсопловую камеру 2, выходной канал 3, измерительное сопло 4.
Диаметр  питающего сопла I значительно меньше диаметра измерительного сопла 4 и поэтому давление в камере 2 определяется зазором
питающего сопла I значительно меньше диаметра измерительного сопла 4 и поэтому давление в камере 2 определяется зазором  между торцом сопла 4 и объектом 5, выполняющим роль заслонки. Расход воздуха через сопло 3 является нагрузкой датчику.
между торцом сопла 4 и объектом 5, выполняющим роль заслонки. Расход воздуха через сопло 3 является нагрузкой датчику.
При движении объекта 5 вдоль оси X - X сопла струйный преобразователь может работать как аналоговый измеритель (датчик) расстояния, а при перемещении заслонки перпендикулярно к оси X - X как датчик положения (наличие объекта).
Рассмотрим принцип работы струйного датчика типа "сопло-сопло" (рис.4)
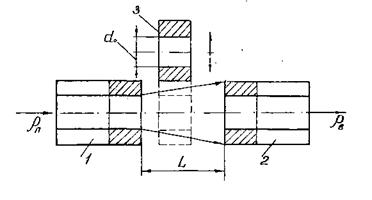
Рисунок 4 - Схема струйного датчика типа "сопло-сопло"
Он состоит из питающего I и приемного 2 сопел и объекта 3, выполняющего роль прерывателя. К питающему соплу I подводят сжатый очищенный воздух давлением , а приемное сопло 2 соединяют с пневмоусилителем или преобразователем выходного сигнала в электрический импульс.
В результате периодического прерывания воздушной струи на выходе возникает сигнал 0-1. При наличии в прерывателе 3 отверстия на выходе можно получить сигнал различного уровня в зависимости от диаметра  отверстия и его положения относительно оси сопел. В этом случае датчик используют для распознавания положения изделий.
отверстия и его положения относительно оси сопел. В этом случае датчик используют для распознавания положения изделий.
Системы технического зрения (СТЗ).
Центральным элементом СТЗ является датчик - видеопреобразователь. Используют передающие телевизионные трубки (видеоканалы), фотоматрицы, волоконно-оптические световоды.
Фотоматрицы предназначены для построения голографических запоминающих устройств малой емкости.
Дата добавления: 2016-10-17; просмотров: 2287;