Автоматические системы управления. В автоматических системах управления функции оператора заключаются в обучении, запуске и периодическом наблюдении за работой ПР.
В автоматических системах управления функции оператора заключаются в обучении, запуске и периодическом наблюдении за работой ПР.
Метод обучения заключается в следующем.
Оператор вручную проводит кистью (схватом) робота по желаемой траектории, ПР "запоминает" эту траекторию и затем, в автоматическом режиме, многократно её повторяет. Такие системы различается средствами очувствления, принципами адаптации и уровнем развития элементов искусственного интеллекта.
Например, робот-лаборант, берущий пробы из различных аппаратов и анализирующий их, должен обладать развитой системой сенсорных датчиков, элементами адаптации при работе в условиях с заранее неизвестными изменениями среды и элементами искусственного интеллекта для ориентирования в пространстве и времени.
Программные системы управления делятся на цикловые, позиционные и контурные.
Программой управления роботом называют временную последовательность команд, подаваемых на приводы робота, обеспечивающую необходимое движение (перемещение) захватного устройства.
Перемещение манипулятора ПР представляет собой определённую последовательность операций, направленную на выполнение производственной задачи.
Последовательность движений с возвращением кисти в исходную точку траектории называют циклом, а устройства, обеспечивающие цикличность движений кисти - ц и к л о в ы м и . Особенно цикловые устройства характерны для жестко программируемых роботов ПР I поколения ("взять-перенести-положить").
Работа цикловых устройств управления носит дискретный характер. Рабочий цикл можно разбить на несколько интервалов - тактов, т.е. интервалов времени, в течение которых выполняется перемещение по ранее заданному закону.
Цикловые системы являются простейшими системами программного управления ПР (например, унифицированное устройство циклового программного управления типа УМЦ-633, предназначено для управления манипуляторами промышленного миниробота ПМР-0,5-254 КПВ с позицированием по упорам). Они обеспечивает двух-или трехточечное позицирование манипулятора по упорам. В момент подхода к концевому упору, его движение прекращается и из системы управления поступает сигнал, согласно которому включается следующее по программе движение. ПР перепрограммируется путем перестановки упоров и изменения последовательности движений.
Применение в управляющей части специальных программных задающих устройств позволяет при необходимости, изменять рабочий цикл, что дает основание называть устройствами программного управления.
Назначение задающего устройства - обеспечить последовательность выполнения операций в соответствии с заданной программой.
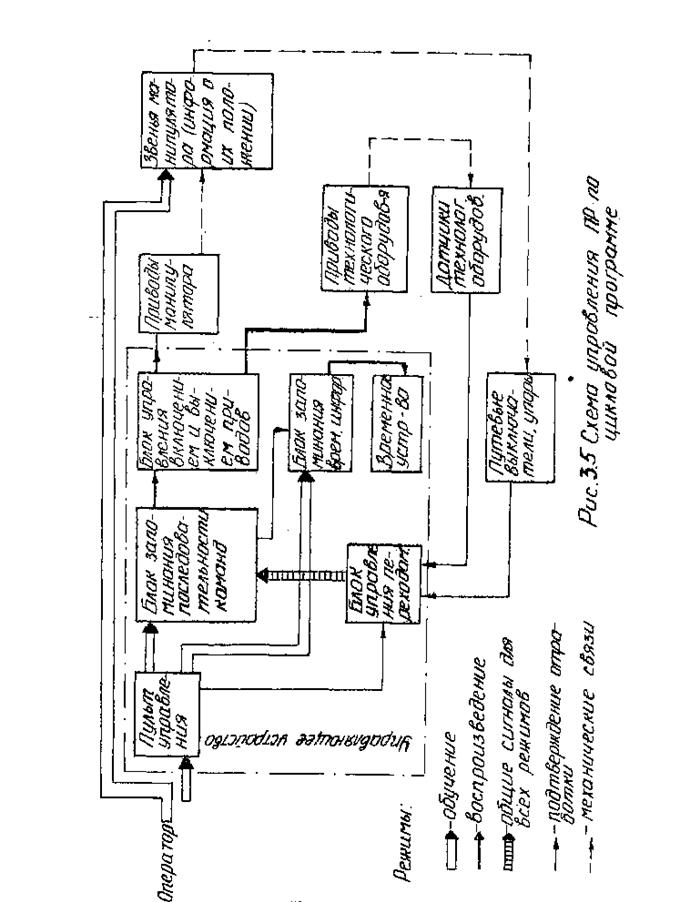
В качестве программных для цикловых управлявших устройств используют: штеккерную панель, вращающийся барабан в виде кулачкового вала, перфокарты и перфоленты. Команды, заданные программным устройствам, поступают на привод соответствующей координаты. Схему управления ПР по цикловой программе см. рис.5.
Позиционные системы управления (серии УПМ) ПР имеют запоминающее устройство, в которое заносятся координаты пространственного положения ряда (до 1000) точек позицирования, определяющих требуемое движение манипулятора. Вычислительное устройство сравнивает положение манипулятора с требуемым и выдает сигналы на приводы всех звеньев манипулятора.
Системы контурного управления (серия УКМ) обеспечивают движение манипулятора по непрерывной траектории, т.е. позволяют осуществлять позицирование рабочего органа в любой точке рабочей зоны ПР. К тому же в процессе перемещения манипулятора по траектории можно изменять параметры его движения (скорость, ускорение и др.).
Недостатки ПР с программными системами управления:
- работа по жестким программам, многократное повторение одних и тех же движений;
- особенно необходимость в дорогой оснастке (ориентаторов, позиционеров, наполнителей и др.) иногда оснастка стоит дороже ПР;
- к тому же, ПР можно относительно легко и быстро перепрограммировать, тогда как перенакладка оснастки под новую технологию - процесс весьма длительный;
- необходима предварительная точная центровка детали, поскольку робот берет её с одного и того же места одним и тем же "взмахом".
Этих недостатков лишена адаптивная система. Она осуществляет управление ПР при изменении параметров внешней среды. Например, ПР должен "чувствовать", что он взял объект манипулирования (ОМ). Если объект отсутствует, робот должен либо искать его, либо прекратить работу. ПР также должен "чувствовать " силу сжатия ОМ, чтобы тяжелый не уронить, а хрупкий, например, стеклянный, не раздавить. Адаптивные роботы используют для обслуживания движущихся предметов, например, на конвейере. Адаптивные ПР оснащены сравнительно простыми техническими средствами.
Лекция 10
Дата добавления: 2016-10-17; просмотров: 3199;