Исполнительное устройство на базе пантографа.
В качестве рычажного механизма чаще всего используют ПАНТОГРАФ, что продиктовано условиями эксплуатации, размерами и конфигурацией рабочей зоны, высотой помещения и размерами площади, занимаемой СМ.
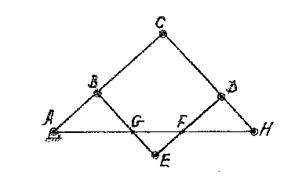
Рисунок 1 - Механизм пантографа
Схема механизма пантографа, состоящего из 4 шарнирно соединенных рычагов, показана на рис.1. В механизме ВС = ЕД и BE = СД. Четыре рабочие точки А, G, F, Н, принадлежащие звеньям механизма, обладают важными свойствами. Если соединить со стойкой один из рычагов шарниром, совпадающим с рабочей точкой, (в нашем случае рычаг АС и точка А), то при перемещении любой из оставшихся рабочих точек по какой-либо траектории, оставшиеся (теперь только две) рабочие точки опишут подобную траекторию с определенным коэффициентом подобия. Последний равняется соответствующим передаточным отношениям механизма пантографа.
Разновидность схем механизмов пантографов с тремя рабочими точками, используемых в конструкциях СМ, показана на рис.2, а механизмов пантографов с четырьмя рабочими точками - на рис.3.
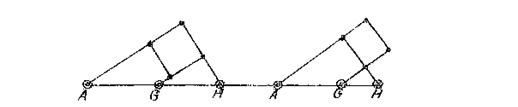
Рисунок 2 - Механизм пантографа с 3-мя рабочими точками
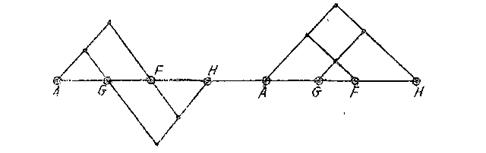
Рисунок 3 - Механизм пантографа с 4-мя рабочими точками
Чаще используют исполнительные устройства СМ по схеме рис.4. Точка А присоединена к стойке, а на точку С наложены ограничения и она может перемещаться только горизонтально. Расстояние от точки А до траектории точки С равно S. Высота траектории рабочей точки Б относительно точки А

Так как  , углы в
, углы в  равны и треугольники подобны, то из подобия следует:
равны и треугольники подобны, то из подобия следует:

После некоторых преобразований получим
 .
.
Но  , тогда
, тогда  .
.
Следовательно при перемещении точки Е ее высота над точкой А остается постоянной.
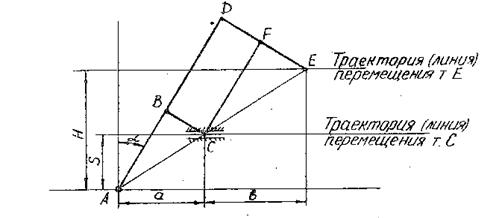
Рисунок 4 - Схема рычажного механизма с горизонтальной направляющей
(с 3 рабочими точками)
На рис. 5. изображена схема, когда точка А ограничена и перемещается по вертикали в направляющих, точка С закреплена в стойке. Следовательно, при постоянной величине (а) расстояние (в) остается неизменным.
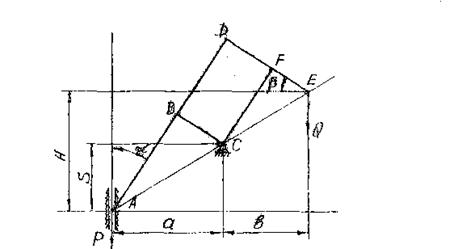
Рисунок 5 - Схема рычажного механизма с вертикальной направлявшей
(с 3 рабочими точками)
Действительно, согласно рис.5
Если в точке Е к пантографу подвесить груз Q , то его можно уравновесить силой, приложенной в точке А
Так как отношение  остается постоянным
остается постоянным  , то груз Q, подвешенный в точке Е будет уравновешен постоянной силой Р независимо от положения точки Е в рабочей зоне механизма. Для перемещения груза в любую точку рабочей зоны потребуется сила только для преодоления сопротивлений вращению в шарнирах и перемещению шарниров в прямолинейных направляющих, т.е. только для преодоления сил трения.
, то груз Q, подвешенный в точке Е будет уравновешен постоянной силой Р независимо от положения точки Е в рабочей зоне механизма. Для перемещения груза в любую точку рабочей зоны потребуется сила только для преодоления сопротивлений вращению в шарнирах и перемещению шарниров в прямолинейных направляющих, т.е. только для преодоления сил трения.
3. Исполнительные устройства на базе параллелограмма.
Параллелограммные механизмы в СМ используют для обеспечения постоянной ориентации грузового блока в вертикальной плоскости. При этом основные несущие рычаги исполнительного устройства включаются в состав параллелограмного механизма.
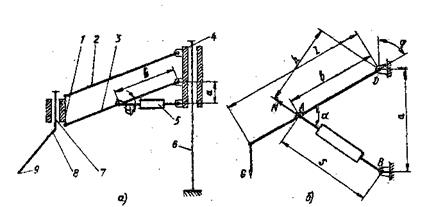
Рисунок 6. Исполнительное устройство на базе параллелограммного механизма:
а - кинематическая схема; б - схема нагрузка.
Рассмотрим в качестве примера параллелограммннй механизм, изображенный на рис.4.8, в состав которого входят звенья 2-4, а также короткое звено I, несущее вертикальную ось 7 стрелы 8 с подвешенным в точке 9 грузовым блоком. При повороте звеньев 2,3 в вертикальной плоскости под действием привода 5 ось 7, благодаря свойствам параллелограммного механизма, сохраняет вертикальное положение. Поэтому при повороте стрелы 8 вокруг оси 7 грузовой блок движется по окружности, лежащей в горизонтальной плоскости. При одновременном повороте всего исполнительного устройства вокруг вертикальной оси стойки - 6 грузовой блок может перемещаться по любой траектории, лежащей в горизонтальной плоскости, в т.ч. и по прямым линиям, попадая в любую точку в пределах рабочей зоны СМ.
4. Прямила в исполнительных устройствах СМ.
Одним из основных требований, предъявляемых к кинематическим схемам исполнительных устройств СМ является обеспечение прямолинейной горизонтальной траектории движения грузового блока при перемещении его вручную в случае заторможенного привода вертикального перемещения.
Этому требованию отвечает ряд схем прямолинейных направляющих шарнирных механизмов (прямил). Схема одного из прямил дана на рис.7.
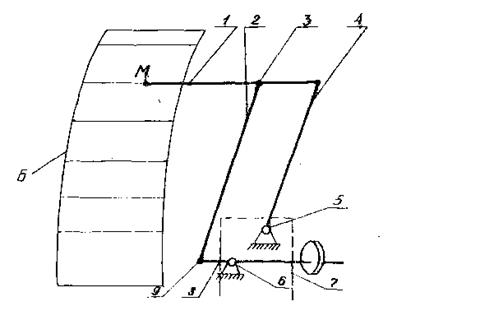
Рисунок 7 - Исполнительное устройство с прямилом
Прямило (прямолинейно направляющий механизм) содержит рычага I, 2, 4. На конце рычага I (точка М) подвешен грузовой блок. По заданным длинам рычагов I и 4, определяемых размерами рабочей зоны, и заданному положению шарнира 5 соединения рычага 4 со стойкой 7 выбирают такое положение шарнира 3 на рычаге I и такую длину рычага 2,при которых в случае поворота рычага 4 точка М перемещается по траекторий, близкой к горизонтальной прямой (отрезки А).
Шарниром 9 рычаг 2 связан с дополнительным рычагом.8, который соединен в шарнире 6 со стойкой 7. При повороте рычага 8 вокруг шарнира 6 точка М рычага I перемещается по траектории, близкой к вертикали, т.е. к вертикальной прямой (отрезок Б).
Применение шарнирно-рычажных механизмов для прямолинейных траекторий движения позволяет создавать компактные конструкции исполнительных устройств СМ и ПР.
Дата добавления: 2016-10-17; просмотров: 3672;