Использование ПР в электрометаллургии
Технологические промышленные роботы (робот, оснащенный инструментом вместо захвата) получили применение и в электроплавильном производстве. Так, японская фирма "Исикавадзима харима дзёкогё" с целью механизации работ в металлургии изготавливает специальные IIP. Один тип промышленных роботов используется для торкретирования футеровки печей, другой - для наращивания электродов дуговых печей.
Промышленный робот, применяемый для свинчивания электродов, изображен на рис.2.
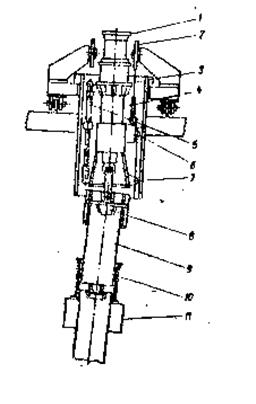
Рисунок 2 - Промышленный робот
Рассматриваемый промышленный робот состоит из следующих основных элементов: гидравлического двигателя I, шкива 2 подъёмного механизма, каната 3, ползуна 4, гидроцилиндра 5, направляющего ролика 6, крепления 7, ниппеля 8, электрода 9, направляющей 10 и держателя 11. Робот для наращивания электродов автоматически выполняет операции по извлечению электрода из контейнера, его перемещение к электродержателю, совмещению и соединению с работающим электродом в соответствии с заданной программой.
Для загрузки шихтой 50-ти тиглей электропечи для плавки алюминия применяют манипулятор, размещенный на подвижной тележке (рис.2).
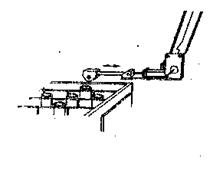
Рисунок 2 - Загрузка тиглей электропечи
Ковш с шихтой и гидропривод его опрокидывания установлены на грузовом блоке. Управление манипулятором дистанционное из кабины оператора. Кабина герметизирована, оборудована кондиционером.
Использование манипулятора освободило рабочего от выполнения вручную тяжелых операций в условиях высоких температур и запыленности цеха.
Дата добавления: 2016-10-17; просмотров: 1001;