Разновидности и свойства САР
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ
Основные принципы управления
Задача управления заключается в том, чтобы объект управления в условиях реальной эксплуатации обеспечивал выполнение требуемых функций. Фактическое состояние объекта управления определяется одним или несколькими рабочими параметрами y (t). Чаще всего рабочие параметры представляют собой физические величины: скорость (линейная и вращения), температура, напряжение электрического тока, линейные и угловые перемещения и т.д. В реальных условиях на объект управления оказывают влияние внешние воздействия, которые называются возмущающими z(t). Эти воздействия вызывают изменение внутреннего состояния объекта и как следствие - рабочих параметров. В связи с этим для выполнения рабочих функций по заданным алгоритмам необходимо на объект управления организовать подачу управляющих воздействий U (t) (рис 1.1).
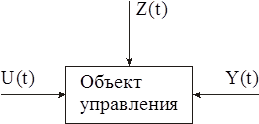 |
Рис 1.1. Объект управления
Заданный алгоритм обычно предусматривает поддержание рабочего параметра постоянным во времени или же изменение во времени по известному или неизвестному закону.
Задача управления, по существу, заключается в формировании такого закона изменения управляющего воздействия, при котором обеспечивается заданный алгоритм при наличии возмущающих воздействий.
Для решения этой задачи используются три фундаментальных принципа управления: разомкнутое управление, управление по возмущению (принцип компенсации) и замкнутое управление (принцип обратной связи или управление по отклонению).
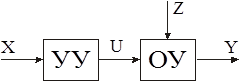
Структурные схемы принципов управления представлены на рис 1.2. При разомкнутом принципе (рис 1.2, а) управляющее устройство вырабатывает сигнал управления U, который поступает на исполнительные элементы объекта управления. На вход управляющего устройства подается сигнал X, представляющий собой задание.
а)
 |
б)
 |
в)
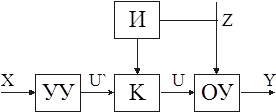
УУ - управляющее устройство; ОУ - объект управления;
И - измеритель возмущения; К - корректирующее устройство;
Рис 1.2. Основные принципы управления.
Задание формируется человеком или специальным задающим устройством. Данный принцип отличается простотой технической реализации, но оказывается малоэффективным при недостаточной информации о характере возмущении и при их большой интенсивности.
Для того чтобы учесть характер возмущений в процессе управления объектом применяют управление по возмущению (рис.1.2, б). Здесь убавляющее устройство вырабатывает сигнал управления U’ в соответствии с заданием Х. Одновременно производится измерение возмущений, действующих на объект, и производится коррекция сигнала управления U’. Полученный в результате коррекции сигнал управления U поступает на объект управления. Данный принцип является более эффективным по сравнению с разомкнутым управлением, при условии, что имеется техническая возможность измерения возмущающих воздействий. Указанное условие ограничивает применение данного принципа.
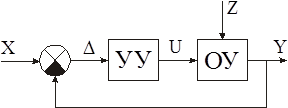
Принцип замкнутого управления (рис 1.2, в) позволяет решить задачу управления при любом характере действующих возмущений.
В этом случае сигнал задания поступает на один из входов элемента сравнения, на другой вход которого по цепи обратной связи подается измеренное с помощью датчиков фактическое значение рабочего параметра объекта управления. На выходе элемента сравнения имеем сигнал D (ошибку, отклонение), который является разностью между заданным и фактическим значениями параметров, т.е. D=Х - Y. Управляющее устройство в зависимости от величины и знака ошибки вырабатывает сигнал управления. Таким образом, принцип замкнутого управления учитывает не только задание, но и фактическое состояние объекта и действующих возмущений. Поэтому данный принцип является наиболее универсальным и позволяет успешно решать задачи управления, несмотря на неопределенность объекта управления и характера возмущений. Класс автоматических систем, построенных на основе принципа замкнутого управления, получил название систем автоматического регулирования (САР).
Примером таких систем являются системы автоведения поезда. В этих системах на борту локомотива определяется заданная скорость Vз применительно к конкретному участку. Эта скорость вычисляется специальным устройством и зависит от расстояния до впередиидущего поезда, от состояния верхнего строения пути, типа локомотива, давления в тормозной магистрали, веса состава, профиля участка и т.д. На борту локомотива производится измерение фактической скорости Vj и сравнение с заданной. Если Vз> Vj то происходит включение тяговых двигателей, в противном случае включаются тормозные средства.
Свойство универсальности САР позволяет предположить, что структура замкнутого управления в неявном виде широко представлена в технике и природе. Рассмотрим динамические процессы, протекающие в элементарной RC-цепи (рис 1.3).
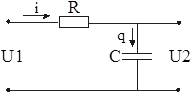
Рис 1.3 RC-цепь
Падение напряжения на сопротивлении R (UR) равно разности между входным напряжением U1 и выходным напряжения U2 , т.е. UR=U1-U2. Напряжение UR определяет ток  , от которого зависит заряд ёмкости,
, от которого зависит заряд ёмкости, 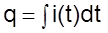 .
.  Напряжение на конденсаторе U2 определяется его зарядом,
Напряжение на конденсаторе U2 определяется его зарядом,  .
.
Таким образом, можно выделить внутреннею обратную связь, определяющую зависимость тока i (t) не только от входного напряжения U1 , но и от напряжения U2 , до которого зарядилась ёмкость под действием тока i (t). В результате получим структуру, представленную на рис 1.4.
 |
Рис. 1.4. Структурная модель RC – цепи
Эта структура представляет собой систему автоматического управления, которая построена по замкнутому принципу.
Разновидности и свойства САР
Отличительная особенность САР состоит в том, что объект управления рассматривается как составной элемент система автоматики.
В зависимости от основной цели задачи управления САР классифицируются следующим образом: системы стабилизации, система программного управления, следящие системы.
В системах стабилизации рабочий параметр объекта (регулируемая величина) поддерживается постоянным во времени при постоянном задании. В системах программного управления рабочий параметр объекта изменяется во времени по заранее известному закону, в соответствии с которым изменяется задание.
В следящих системах рабочий параметр объекта изменяется во времени по заранее неизвестному закону, который определяется каким-то внешним независимым процессом.
В зависимости от количества регулируемых величин системы могут быть одномерными (одна регулируемая величина) лил многомерными (несколько регулируемых величин).
В зависимости от характера электрических сигналов системы могут быть: непрерывными, с гармоническими сигналами и дискретные. Дискретные в свою очередь, могут быть релейными, импульсными или цифровыми. Вследствие бурного развития микроэлектроники широкое распространение получили цифровые системы управления, обладающие прежде всего высокой точностью.
Важным свойством также является поведение параметров системы во времени.
Если в период эксплуатации параметры являются неизменными, то система считается стационарной, в противном случае - нестационарной. Кроме того, особо выделяются системы с распределенными параметрами, т.е. такие системы, которые содержат распределенные в пространстве элементы, например, длинные электрические линии и т.д.
Указанные выше свойства систем определяют вид математического описания протекающих процессов. При этом необходимо иметь ввиду, что большинство систем обладают свойством инерционности. Поэтому в системах можно наблюдать переходной процесс и установившийся режим. Наиболее приемлемым способом математического описания в этом случае являются дифференциальные уравнения (для непрерывных систем) или разностные уравнения (для дискретных систем). Вид дифференциального уравнения зависит от основных свойств, которыми обладает САР. В простейших случаях это линейные дифференциальные уравнения с постоянными коэффициентами.
В зависимости от характера внешних воздействий (задающего и возмущающего) различают детерминированные и стохастические системы. В детерминированных САР внешние воздействия имеют вид постоянных функций времени. В стохастических системах внешние воздействия имеют вид случайных функций. В дальнейшем будут рассматриваться только детерминированные системы.
По свойствам ошибки (отклонения) в установившемся режиме различают статические и астатические системы. Система, в которой величина установившейся ошибки зависит то величины возмущения при постоянном задании называется статической по возмущению. Если установившаяся ошибка не зависит от величины возмущения, то система является астатической 1-ого порядка. Если установившаяся ошибка не зависит от первой производной возмущающего воздействия, то система является астатической 2-го порядка. Кроме того, различают статизм и астатизм по задающему воздействию. При этом возмущение считается постоянным и установившаяся ошибка рассматривается в зависимости от величины задающего воздействия.
Рассмотренные разновидности и свойства являются основными и не исчерпывают всего многообразия САР.
Дата добавления: 2016-09-20; просмотров: 831;