Виды задающих и возмущающих воздействий
Возмущения, действующие на САР, представляют собой непрерывные функции времени с различными законами изменения. Часто такой же характер имеют задающие воздействия. Поэтому поведение САР в реальных условиях представляет собой сочетание переходного и установившегося режимов. В этом случае возникают трудности принципиального характера, т.к. заранее неизвестны законы измерения внешних воздействий, что затрудняет анализ динамики и статики САР, Для ликвидации возникших затруднений часто используют так называемые типовые, управляющие и возмущающие воздействия, которые представляют собой либо наиболее вероятные, либо наиболее неблагоприятные законы изменения управляющих и возмущающих воздействий. Например, довольно широко в качестве типовых используют воздействия полиномиального вида:
 (1.1)
(1.1)
,
где n= 0,1,2… натуральные числа;
 - постоянные величины;
- постоянные величины;
 |
1(t) называется единичная ступенчатая функция.
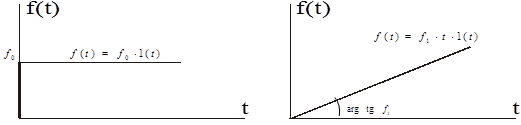
При n=0 выражение (1.1) определяет ступенчатое воздействие:
 |
. (1.2)
При n=1 из выражения (1.1) получим линейное воздействие ( воздействие с постоянной скоростью):
 |
.
(1.3)
 При n=2 из выражения (1.1) получим воздействие с постоянным ускорением:
При n=2 из выражения (1.1) получим воздействие с постоянным ускорением:
.
(1.4)
Графическое представление типовых воздействий, соответствующих уравнениям (1.2), (1.3), (1.4) представлено на рис. 1.5.
В некоторых случаях в качестве типового используется воздействие следующего вида:
 |
,
где d(t) – единичная дельта-функция
 |
Единичная дельта - функция (единичный импульс) представляет собой математическую идеализацию импульса бесконечно малой длительности, бесконечно большой амплитуды, имеющего конечную площадь, равную единицы, т.е.  .
.
 | |||
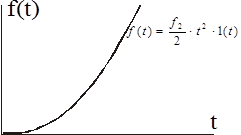 |
Рис 1.5. Типовые полиномиальные воздействия
Существует следующая связь между единичной ступенчатой функцией и дельта – функцией
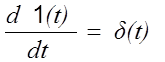 |
.
Кроме того, часто применяются гармонические типовые воздей ствия
 |
где k- постоянный коэффициент;
w- частота;
j-фаза.
Момент приложения внешних воздействий к САР обычно принимается за нуль отсчёта времени. При таком подходе внешние воздействия для отрицательного момента времени равны нулю. В связи о этим, в аналитические выражения для внешних воздействий в качестве множителя вводят единичную ступенчатую функцию.
Любое внешнее воздействие сложной формы может быть приближенно представлено в виде совокупности типовых воздействий, связанных между собой определенными математическими операциями.
2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ САР И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ.
2.1 Математическое описание элементов и систем автоматического регулирования
Поведение САР в процессе функционирования представляет собой сочетание статических и динамических режимов. Для проведения теоретических исследований САР и её отдельных элементов необходимо иметь уравнения, описывающие их поведение при изменяющихся внешних воздействиях. Эти уравнения представляют собой выраженные в математической форме соотношения, связывающие входные и выходные сигналы и воздействия.
С целью упрощения получения математических соотношений обычно вводят следующие допущения:
- САР и ее элементы обладают свойством стационарности;
- элементы САР являются линейными;
- протекающие процессы являются непрерывными функциями времени при выполнении нулевых начальных условий.
В обобщенном виде САР представлена на рис. 2.1.
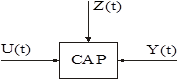 |
Рис 2.1 Система автоматического регулирования
Здесь X и Z являются входными воздействиями, а Y – выходным параметром.
В общем случае действие непрерывной линейной САР описывается неоднородным дифференциальным уравнением следующего вида:
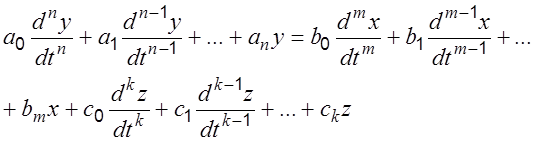 |
, (2.1)
где a, b, c - постоянные коэффициенты, зависящие от параметров системы.
Введем оператор дифференцирования  . Тогда уравнение (2.1) может быть представлено в операторном виде:
. Тогда уравнение (2.1) может быть представлено в операторном виде:

.(2.2)
В выражении (2.2) полином, стоящий при выходном параметре Y, называется собственным оператором и обозначается Q(p). Полиномы при воздействиях Х и Z называются соответственно оператором управляющего воздействия и оператором возмущающего воздействия. Оператор управляющего воздействия обозначим R1(p), а оператор возмущающего воздействия обозначим R2(p). С учётом введенных обозначений уравнение (2.2) примет вид:
 |
. (2.3)
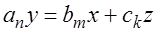 Если рассматривается только установившейся режим, то уравнение (2.2) примет вид:
Если рассматривается только установившейся режим, то уравнение (2.2) примет вид:
. (2.4)
Таким образом, уравнение (2.2) описывает как динамику, так и статику САР, а уравнение (2.4) описывает только статику.
В тех случаях, когда система или её составной элемент описывается дифференциальным уравнением не выше 2-го порядка, применяется стандартная форма записи уравнения. Например, имеем САР, содержащую один вход X и один выход Y, которая описывается уравнением
 |
. (2.5)
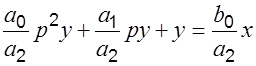 Левую и правую часть уравнения (2.5) разделим на коэффициент a2
Левую и правую часть уравнения (2.5) разделим на коэффициент a2
(2.6)
.
 |
Введем обозначения  .
.
Тогда уравнение (2.6) примет вид
 (2.7)
(2.7)
В уравнении (2.7) параметр Т1 имеет размерность сек-2, параметр Т2 –сек-1, а параметр К является безразмерным. Выражение (2.7) представляет собой уравнение в стандартной форме, которая является наиболее удобной при дальнейшем анализе динамических процессов. В этом случае собственный оператор Q(p) принимает вид алгебраического уравнения
 |
.
Следует отметить, что используемый выше оператор дифференцирования p имеет тесную связь с оператором интегрального преобразования Лапласа S, который является комплексной величиной. Как известно, для линейных дифференциальных уравненийс постоянными параметрами при нулевых начальных условиях с точностью до обозначения оператор p соответствует оператору S, т.е.  .
.
Это обстоятельство позволяет использовать для решения уравнений типа (2.1), а также для моделирования САР интегральное преобразование Лапласа.
Напомним, что для отображения Функции f(t) действительной переменной t на комплексной плоскости в виде функции комплексной переменной f(S) выполняется следующим образом:
 |
,
где S=a+jb .
При этом f(t) называют оригиналом, а f(S) – изображением. Полагают, что функция f ( t ) обладает следующими свойствами:
- f ( t ) определена и кусочно - дифференцируема на всей положительной числовой полуоси(0-¥);
- f ( t )=0 при t<0;
-существуют такие положительные числа M и С, при которых выполняется соотношение:
 |
Переход от изображения f ( S ) к оригиналу f ( t ) (обратное преобразование Лапласа) выполняется следующим образом:
 |
.
Здесь интегрирование производится вдоль любой прямой, которая удовлетворяет условию Re(S)=a0>С. Символически обратное преобразование Лапласа обозначается в виде
 .
.
.
Дата добавления: 2016-09-20; просмотров: 1517;