Расчет надежности функций с учетом действий оператора
Для ряда функций АСУ ТП оператор является резервирующим элементом. Так, при отказе функции автоматического регулирования технологической величины оператор переходит на неавтоматическое (ручное) регулирование. В связи с этим надежность функции регулирования определяется надежностью как технических средств, участвующих в обоих видах регулирования, так и оператора.
Надежность работы оператора в качестве резервирующего элемента различных функций АСУ ТП зависит от совокупности факторов, к числу которых относятся его квалификация и психофизиологические особенности, приспособленность АСУ ТП к участию в их работе оператора, своевременность представления ему информации об отказе функции, загруженность оператора выполнением других функций, наличие временного резервирования в реализации анализируемой функции.
Особенности учета действий оператора рассмотрим на примере расчета вероятности отказа функции регулирования уровня в подогревателе высокого давления (ПВД). Система автоматического регулирования уровня рассмотрена в 3.6, ее структурная схема приведена на рис. 30,б. Система регулирования включает нерезервированную часть: ключ, исполнительные усилитель и механизм, регулирующий орган. Их отказ приводит к отключению ПВД. Остальные элементы резервированы, все элементы основной и резервной цепи являются восстанавливаемыми. Функция регулирования отказывает и происходит отключение ПВД, если отказали нерезервированные элементы или в момент отказа и восстановления автоматической части, включающей с первого по третий элементы, происходит отказ резервирующей неавтоматической части из-за ошибки оператора или отказа остальных элементов резервной цепи. Деятельность оператора при контроле работы АСР уровня состоит из следующих этапов: восприятие сигнализации, переход с автоматического регулирования на дистанционное, поддержание уровня в заданных пределах до восстановления отказавшего элемента АСР. Естественно, что при выполнении каждого из этих этапов существует вероятность отказа оператора. Для упрощения задачи будем считать, что форма сигнализации отклонений уровня обеспечивает своевременное восприятие сигнала оператором. При дистанционном управлении уровнем, хотя оператор и ведет процесс с меньшей эффективностью, чем АСР, тем не менее предельные отклонения уровня, вызывающие срабатывание защиты, исключены.
Для иллюстрации принципов определения вероятности своевременного перехода оператора с автоматического регулирования уровня на дистанционное рассмотрим зависимости, представленные на рис.35.
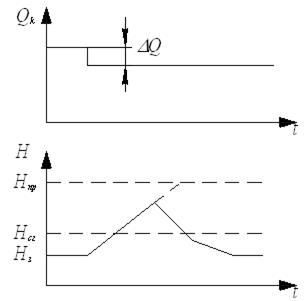
Р и с.35. График изменения уровня в ПВД при отказе АСР
При нормальной работе регулятора уровня расход конденсата из ПВД, имеющего усредненную площадь парового пространства F, составляет Qk. При этом уровень находится вблизи заданного значения Hз. В динамическом отношении ПВД представляет собой интегрирующее звено с передаточной функцией  , где
, где  –коэффициент передачи. При наличии небаланса
–коэффициент передачи. При наличии небаланса  между притоком пара и стоком конденсата уровень в ПВД начинает меняться со скоростью
между притоком пара и стоком конденсата уровень в ПВД начинает меняться со скоростью  . Особенно опасно превышение притока над стоком, вызванное попаданием питательной воды в паровое пространство через разрывы трубок или неплотности трубной доски подогревателя. Очевидно, что скорость нарастания уровня зависит как от значения возмущения , так и от динамических характеристик ПВД.
. Особенно опасно превышение притока над стоком, вызванное попаданием питательной воды в паровое пространство через разрывы трубок или неплотности трубной доски подогревателя. Очевидно, что скорость нарастания уровня зависит как от значения возмущения , так и от динамических характеристик ПВД.
При достижении уровнем предельного значения  срабатывает защита, отключая ПВД. Таким образом, в течение времени
срабатывает защита, отключая ПВД. Таким образом, в течение времени  должна сработать сигнализация в момент
должна сработать сигнализация в момент  и за оставшийся интервал времени
и за оставшийся интервал времени  оператор должен отключить автоматическую часть и перейти на ручное поддержание уровня.
оператор должен отключить автоматическую часть и перейти на ручное поддержание уровня.
Время реакции оператора на сигнал об отклонении параметра складывается из трех интервалов: времени восприятия сигнала, времени принятия решения и времени совершения действия. Длительность первого интервала при звуковом и зрительном восприятии сигнала составляет 0.15-0.2с. Время принятия решения зависит от квалификации оператора, оно сокращается при наличии предупредительного сигнала об отклонении параметра. Суммарная продолжительность двух первых интервалов не превышает 1с. Затраты времени на переключение цепи и управление регулирующим органом складываются из времени подхода к той части пульта управления, где находятся ключи управления соответствующим регулирующим органом, и операций с ними. Подсвечивание на мнемосхеме обозначения вызываемого регулирующего органа позволяет оператору проконтролировать правильность своих действий.
Из-за индивидуальных психофизиологических особенностей время реакции оператора является случайной величиной, имеющей асимметричное модальное распределение. В качестве такого распределения можно использовать a-распределение.
Исходя из статических характеристик действующих на объект возмущений и динамических характеристик последнего, определяем функцию распределения Fпр времени достижения предельного значения параметра при отключении АСР, характеризующую наличие временного резервирования по функции регулирования. Располагая Fпр и функцией распределения времени перехода оператора с автоматического ведения процесса на дистанционное, можно рассчитать показатель надежности функции регулирования с учетом наличия резервной цепи регулирования с оператором.
Дата добавления: 2016-07-09; просмотров: 749;