Влияние периодичности диагностических циклов на показатели надежности восстанавливаемых систем
Структурное и конструктивное разнообразие САУ затрудняет создание единой унифицированной системы диагностирования, хотя требования по унификации остаются по-прежнему одними из основных. Такое положение приводит к необходимости анализа и учета принимаемой схемы построения САУ.
Для систем диагностирования любого типа характерны следующие режимы работы: режим работы с периодически повторяющимися диагностическими циклами; режим непрерывного контроля работоспособности и организации поиска дефекта.
При оценке методов повышения надежности систем и устройств в процессе эксплуатации с использованием методов и средств технического диагностирования решается задача качественного и количественного определения того выигрыша в надежности, который будет получен от системы диагностирования.
Наиболее объективной оценкой эффективности диагностирования является коэффициент готовности системы. Действительно, из выражения для коэффициента готовности следует, что уменьшение времени, затрачиваемого на восстановление системы, неизбежно приводит к росту коэффициента готовности. Как будет показано ниже, степень роста коэффициента готовности существенно зависит от принятой схемы взаимодействия система диагностирования — средства диагностирования.
Рассмотрим методику оценки влияния проверок, проводимых в процессе диагностирования, на вероятность безотказной работы системы. Характер проверок может быть различным: это может быть и оценка работоспособности системы и поиск дефектов, выполняемый одним из возможных способов (функциональное диагностирование, тестовое диагностирование).
При простейшем потоке отказов неисправность может возникнуть как в процессе эксплуатации, так и в периоды, в которые система находится в нерабочем состоянии. Для простейших потоков справедливо равенство
 , (4.26)
, (4.26)
в котором произведение  характеризует рабочий период,
характеризует рабочий период,  — нерабочий период системы диагностирования, причем, как показывает опыт эксплуатации,
— нерабочий период системы диагностирования, причем, как показывает опыт эксплуатации,  . Для одного часа работы системы (
. Для одного часа работы системы (  ), эквивалентного (в вероятностном смысле)
), эквивалентного (в вероятностном смысле)  часам ее нерабочего состояния, имеем
часам ее нерабочего состояния, имеем
 (4.27)
(4.27)
Введем обозначения:  – время нахождения системы в нерабочем состоянии перед i-м вводом в работу; ti - время работы системы при i-м вводе в работу; k – число включений системы (вводов в работу).
– время нахождения системы в нерабочем состоянии перед i-м вводом в работу; ti - время работы системы при i-м вводе в работу; k – число включений системы (вводов в работу).
Общее время эксплуатации системы может быть определено выражением
 (4.28)
(4.28)
или , учитывая (4.27),
 (4.29)
(4.29)
Переход к выражению (4.29) позволяет считать систему условно работающей непрерывно в течение времени  при условии ее эксплуатации в промежутке времени
при условии ее эксплуатации в промежутке времени  . При исходной схеме работы можно получить выражения для вероятности
. При исходной схеме работы можно получить выражения для вероятности  того, что i-й элемент вызовет отказ системы в интервале времени продолжительностью
того, что i-й элемент вызовет отказ системы в интервале времени продолжительностью
 (4.30)
(4.30)
Интервал времени t отсчитывается от i-й проверки при времени эксплуатации системы jТ. В выражении (6.30)  —средний нерабочий период i-го элемента системы; ti — среднее время безотказной работы i-го элемента.
—средний нерабочий период i-го элемента системы; ti — среднее время безотказной работы i-го элемента.
Выражение для вероятности безотказной работы системы из N элементов при  , в котором учтены все предыдущие k проверок (в общем случае
, в котором учтены все предыдущие k проверок (в общем случае  ), имеет вид
), имеет вид
 (4.31)
(4.31)
Поскольку число вводов системы в эксплуатацию (k) известно, то при принятой продолжительности интервалов времени (T), в конце которых выполняются операции диагностирования, может быть найдена вероятность отказов за время эксплуатации системы tk+τ. Могут быть решены и другие задачи: найдено необходимое число проверок для заданного значения вероятности безотказной работы либо интервал времени между проверками при заданном их числе.
Характер и степень влияния используемых методов и средств диагностирования на повышение надежности САУ необходимо рассматривать с учетом выбираемой компоновки узлов и устройств системы диагностирования.
Организация взаимодействия элементов системы диагностирования предполагает прежде всего изучение условий эксплуатации и использования объекта и аппаратуры диагностирования и определение множества состояний, в которых могут находиться элементы системы диагностирования. Это взаимодействие характеризуется принятым способом оценки работоспособности, методом поиска дефектов, а также функциональными и конструктивными особенностями системы диагностирования.
Поскольку наибольший выигрыш в надежности в каждом конкретном случае имеет свой оптимум, то необходимо выбрать критерий, по которому осуществляется оптимизация. Таким критерием является коэффициент готовности, наиболее полно характеризующий надежность восстанавливаемых систем при использовании тех или иных методов и средств диагностирования.
Существует довольно много способов размещения аппаратуры диагностирования на объектах. Например: 1) полностью встроенная система диагностирования, при которой все элементы диагностирования (датчики, коммутирующие и оконечные устройства) размещены непосредственно в САУ; 2) полностью автономная система диагностирования, для которой, как следует из самого определения, характерна полная автономность всех узлов аппаратуры диагностирования (АД); 3) промежуточные, компромиссные варианты размещения аппаратуры диагностирования на объекте. Рассмотрим методику оценки степени влияния различных схем взаимодействия элементов диагностирования, широко используемую в практике исследования и проектирования систем диагностирования. При этом ограничимся конкретными тремя вариантами а, б и в, приведенными на рис.37.
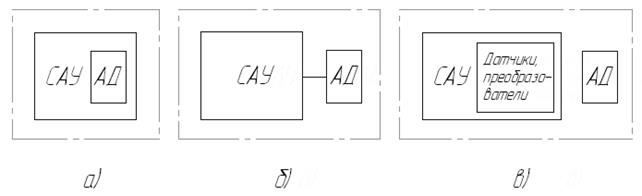
Р и с.37. Варианты взаимодействия элементов системы диагностирования
Схемы, построенные по вариантам а и б, являются полностью встроенными и полностью автономными системами. Вариант в представляет собой схему, в которой основная часть средств диагностирования (коммутирующие устройства, устройства обработки информации и индикации) автономна, а датчики-преобразователи непосредственно находятся в системе диагностирования.
Для комплекса «САУ — средства технического диагностирования» могут рассматриваться следующие режимы: рабочий режим (Р); режим проверки объекта (П); режим проверки системы диагностирования (ПСД).
В каждом из режимов рассмотрим следующие несовместные состояния, образующие полную группу событий: H0 — исправен комплекс; H1 — неисправна САУ; H2 — неисправна центральная часть системы диагностирования; H3 — неисправны встроенные датчики-преобразователи.
Введем обозначения для интенсивностей переходов из одного состояния в другое: l— средняя интенсивность отказов САУ; l1 — средняя интенсивность отказов центральной части системы диагностирования; l2 — средняя интенсивность отказов встроенных датчиков-преобразователей; ν — средняя интенсивность контроля; η — средняя интенсивность цикла диагностирования; ε — средняя интенсивность цикла проверки системы диагностирования; μ — средняя интенсивность восстановления неисправной САУ; μ1—средняя интенсивность восстановления центральной части системы диагностирования; μ2 — средняя интенсивность восстановления датчиков-преобразователей.
Под интенсивностью перехода системы из состояния в состояние понимается условная плотность вероятности того, что этот переход произойдет в момент времени t, предшествовавший моменту времени нахождения системы в первом состоянии. С учетом принятых обозначений модели могут быть отображены графами, представленными на рис. 38.

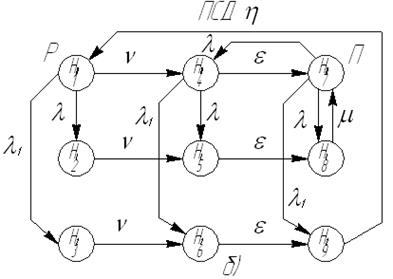

Рис. 38. Графы возможны состояний системы диагностирования
По графам состояний составляется система дифференциальных уравнений, связывающих вероятности нахождения системы диагностирования в каждом из множества состояний, и находится коэффициент готовности САУ.
С помощью этих уравнений оказывается возможным в зависимости от характеристик процессов диагностирования и способа взаимодействия элементов системы диагностирования определить, насколько увеличивается коэффициент готовности САУ при использовании системы диагностирования.
Данный подход к оценке влияния процедур диагностирования на показатели надежности САУ позволяет также найти условия, при которых система диагностирования имеет максимальную эффективность.
Дата добавления: 2016-07-09; просмотров: 976;