ГРАФИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
Графический метод довольно прост и нагляден для решения задачи ЛП с двумя переменными. Он основан на геометрическом представлении допустимых решений и целевой функции задачи.
Каждое из неравенств задачи ЛП определяет на координатной плоскости (x1, x2) некоторую полуплоскость (рис.2.1), а система неравенств в целом – пересечение соответствующих плоскостей. Множество точек пересечения данных полуплоскостей называется областью допустимых решений.
Область допустимых решений всегда представляет собой выпуклуюфигуру, т.е. обладающую следующим свойством: если две точки А и В принадлежат этой фигуре, то и весь отрезок АВ принадлежит ей.
Область допустимых решений графически может быть представлена:
- выпуклым многоугольником,
- неограниченной выпуклой многоугольной областью,
- отрезком,
- лучем,
- одной точкой.
В случае несовместности системы ограничений задачи ЛП область допустимых решений является пустым множеством.
Целевая функция  при фиксированном значении
при фиксированном значении  определяет на плоскости прямую линию
определяет на плоскости прямую линию  . Изменяя значения F формируется семейство параллельных прямых, называемых линиями уровня.
. Изменяя значения F формируется семейство параллельных прямых, называемых линиями уровня.
Это связано с тем, что изменение значения F повлечет изменение лишь длины отрезка, отсекаемого линией уровня на оси x2 (начальная ордината), а угловой коэффициент прямой  останется постоянным (рис.2.1). Поэтому для решения будет достаточно построить одну из линий уровня, произвольно выбрав значение F.
останется постоянным (рис.2.1). Поэтому для решения будет достаточно построить одну из линий уровня, произвольно выбрав значение F.
Вектор  с координатами из коэффициентов целевой функции при x1 и x2 перпендикулярен к каждой из линий уровня (рис.2.1).
с координатами из коэффициентов целевой функции при x1 и x2 перпендикулярен к каждой из линий уровня (рис.2.1).
Направление вектора  совпадает с направлением возрастания целевой функции. Направление убывания целевой функции противоположнонаправлению вектора
совпадает с направлением возрастания целевой функции. Направление убывания целевой функции противоположнонаправлению вектора  .
.
Суть графического метода заключается в следующем. По направлению или против направления вектора  в области допустимых решений производится поиск оптимальной точки
в области допустимых решений производится поиск оптимальной точки  . Оптимальной считается точка, через которую проходит линия уровня Fmax(Fmin), соответствующая наибольшему или наименьшему значению функции F(X). Оптимальное решение всегда находится на границе области допустимых решений. Например, в последней вершине многоугольника области допустимых решений, через которую пройдет целевая прямая, или на всей его стороне.
. Оптимальной считается точка, через которую проходит линия уровня Fmax(Fmin), соответствующая наибольшему или наименьшему значению функции F(X). Оптимальное решение всегда находится на границе области допустимых решений. Например, в последней вершине многоугольника области допустимых решений, через которую пройдет целевая прямая, или на всей его стороне.
При поиске оптимального решения задачи ЛП возможны следующие ситуации:
1) существует единственное решение задачи;
2) существует бесконечное множество решений (альтернативный оптиум);
3) целевая функция не ограничена;
4) область допустимых решений – единственная точка;
5) задача не имеет решений.
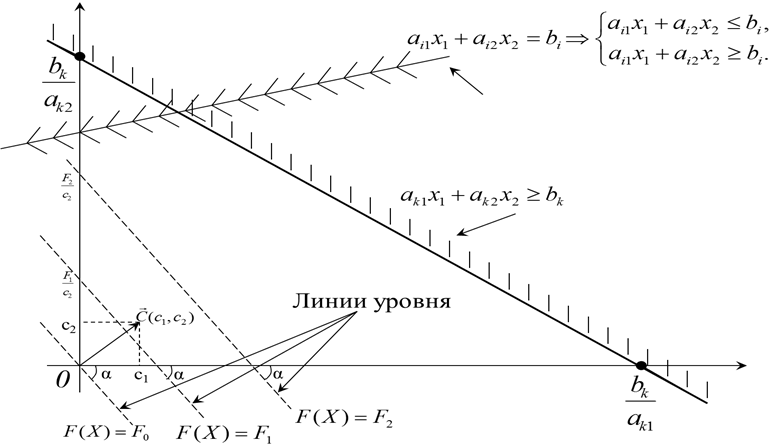
Рис. 2.1. Геометрическая интерпретация ограничений и целевой функции задачи ЛП
Дата добавления: 2016-04-02; просмотров: 1726;