7 страница. Для дистанційного включення й вимикання ТП використається тригер мережі (висновок 6 ДК), керуючий ключем керування реле мережі КУРС.
Для дистанційного включення й вимикання ТП використається тригер мережі (висновок 6 ДК), керуючий ключем керування реле мережі КУРС.
Тепер розглянемо дистанційне перемикання каналів у ТП. У цей час використають замість механічних перемикачів програм селектори каналів (СК) з електронної варикапной настроюванням. Однак через обмежене перекриття по ємності застосовуваних для настроювання варикапів селектор СК метрового діапазону містить два Вч-тракта, один із яких працює з 1-го по 5-й канал (1-2-й поддиапазоны), а іншої - з 6-го по 12-й канал (3-й поддиапазон). Селектор СК дециметрового діапазону працює з 21-го по 60-й канал (4-5-й поддиапазоны). Перемикання з одного поддиапазона на іншій відбувається при подачі на керуючі висновки СК відповідних напруг перемикання поддиапазонов.
Для дистанційного перемикання каналів звичайно використається трехразрядная адресна шина (АШ) між ДК і дешифратором каналів ДП у пристрої УД. Дешифратор ДП перетворить код каналу із двійкового в десятковий позиційний. Цей код надходить на ключі напруги настроювання КНН, призначені для розв'язки по напругах, що діє в ДП, і напругам, необхідним для настроювання СК. Напруга настроювання знімається із блоку резисторів настроювання БРН. ІЗ КНН десятковий позиційний код надходить на блок перемикання поддиапазонов БПП. ІЗ КНН для відображення номера програми подається десятковий позиційний код на цифровий індикатор И. Шифратор КК можна, наприклад, реалізувати на БІСА КР1506ХЛ1, а дешифратор ДК — на КП1506ХЛ2.
Дистанційне керування професійними приймачами.Цей вид керування розглянутий на прикладі керування приймачем декаметрового діапазону. У таких РПУ контроль і керування його роботою виробляється з диспетчерського пункту (ДП), що перебуває від, приймача на деякій відстані, що підвищує оперативність радіозв'язку за рахунок керування приймачами за допомогою ЕОМ по заздалегідь заданій програмі, а при роботі приймачів на не обслуговують радиостанциях, що, скорочує обслуговуючий персонал. Радіоприймач, що перебуває на значній відстані (наприклад, багато кілометрів) від оператора або ЕОМ, управляється шляхом однобічної або двосторонньої передачі інформації. У першому випадку передаються тільки команди телекерування (ТУ); у другому для контролю за роботою організується зворотний канал
Малюнок 8.20
зв'язку для передачі інформації телесигналізації (ТС). При дистанційному керуванні для кожного органа керування РПУ передбачається окрема лінія зв'язку, а при телекеруванні число ліній зв'язку менше числа об'єктів керування; звичайно сигнали ТУ-ТС передаються по одній лінії або по одному каналі зв'язку. Отже, при телекеруванні й телеконтролі РПУ відбувається ущільнення каналу зв'язку й сигнали ТУ-ТС передаються за допомогою послідовних кодів, а при дистанційному керуванні - за допомогою паралельного коду.
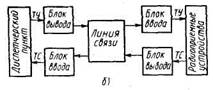
Система телекерування й телеконтролю РПУ складається із пристроїв, установлюваних на диспетчерському пункті, каналу зв'язку й пристроїв, установлюваних на РПУ (мал. 8.20). У блоці висновку на ДП передана інформація перетвориться (кодується й модулюється) у форму, придатну для передачі по лінії зв'язку до керованого РПУ, що містить у блоці уведення зворотні перетворювачі, що декодируют і демодулирующие пристрою. Блок уведення передає інформацію від ДП у приймач, а також викликає спрацьовування візуальних або слуховых індикаторів на передній панелі приймача; блок висновку знімає інформацію із РПУ для передачі на ДП. У радіостанціях з більшим числом приймачів для підвищення ефективності каналу зв'язку використають загальний канал для передачі повідомлень всім РПУ, тобто здійснюють ущільнення одного каналу зв'язку вторинними каналами. В основному застосовуються системи з кодовим поділом каналів, у яких у кожному вторинному каналі, по якому виробляється керування конкретним приймачем, передається спеціальна кодова комбінація. На прийомній стороні сигнали з лінії зв'язку від ДП паралельно подаються на дешифратори приймачів. Якщо кодова комбінація після дешифрування відповідає комбінації, привласненої даному РПУ (його адресі), то сигнали ТУ впливають на цей приймач. При цьому або сам адресний код несе в собі команду ТУ для приймача, або адреса й команди ТУ передаються по черзі. Кодова комбінація, передана по лінії зв'язку від ДП, може містити: адреса РПУ, на який повинна бути передана інформація; номер програми, що визначає вид повідомлення; текст повідомлення. У текст повідомлення може входити багатопозиційна команда ТУ у двійковому або двоїчно-десятковому коді, характер двопозиційної команди, група двопозиційних сигналів ТС і т.д. До двопозиційного ставляться команди «включити- виключити», «збільшитися-зменшити» і т.д. Адреса й текст можуть мати різне число елементів у межах довжини кодової комбінації. Звичайне число імпульсів у повідомленні і їхній тривалості бувають заданими, тому приймач може відключатися як у паузах між сигналами, так і під час імпульсів початку повідомлення, що підвищує перешкодозахищеність системи.
Команди ТУ можуть передаватися й з подвійним підтвердженням. Спочатку із ДП у РПУ посилає адреса й текст підготовленої команди. Після декодування й запам'ятовування адреси це ж повідомлення надходить назад на ДП, де відбувається його порівняння з раніше переданим. При збігу переданого й прийнятого повідомлень із ДП передається на РПУ дозвіл на виконання команди, після одержання якого на ДП надходить відповідне підтвердження. Телекерування може бути побудоване так, що спочатку вибирається група РПУ, потім підгрупа й т.д. Таким чином, вибір для керування необхідного РПУ здійснюється в кілька етапів із застосуванням однакових або різних кодів. Швидкість передачі інформації ТУ становить 50 - 2400 біт/с. Апаратури ТУ будується за принципом модульно-блокової конструкції на ИС. Для передачі інформації ТУ можуть бути використані стандартні телефонні канали провідної або радіорелейної лінії.
При роботі РПУ в дистанційному режимі електромеханічні регулятори й перемикачі повинні бути по можливості замінені електронними. Це дає можливість: підвищити надійність, швидкодія, точність регулювань у РПУ; здійснити економію електроенергії; спростити обслуговування й скоротити габарити приймача. По сигналах ТУ в приймачі може забезпечуватися: комутація антен відповідно вимогам напрямку прийому, частотному діапазону й діаграмі спрямованості; перебудова приймача по частоті; перемикання ланцюгів, що забезпечують необхідний вид прийому, а також смуг пропущення тракту ПЧ; керування аттенюатором у радиотракте приймача; регулювання рівня сигналу; перемикання ланцюгів АРУ й виходів приймача; включення й вимикання джерел харчування, тестової системи перевірки справності блоків приймача; перевірка справності системи сигналізації тривоги; перемикання резервного встаткування і т.д. Аналогічна інформація може бути передана на ДП за допомогою сигналів ТС.
Розглянемо спрощені структурні схеми блоків висновку й уведення інформації з тимчасовим кодовим поділом сигналів для передачі по лінії зв'язку сигналів ТУ й ТС.
Структурна схема блоку висновку, що може бути встановлений як у ДП для передачі сигналів ТУ, так і на приймальному пункті для передачі сигналів ТС, показана на мал. 8.21. Сигнали ТУ (ТС) у вигляді кодових комбінацій, що мають адреси й тексти, подаються через розподільний пристрій РУ на перетворювач коду ПК. Це перетворення обумовлене тим, що сигнали ТУ подаються із клавіатури на РУ в паралельному коді, а передавати сигнали

Малюнок 8.21 Малюнок 8.22
керування по одній лінії зв'язку до приймального пункту необхідно в послідовному коді. У формувачі кодових сигналів ФКС для підвищення завадостійкості в кодову комбінацію додаються синхронізуючі й контрольні імпульси використовуваного коду. Імпульси коду перетворяться в модуляторі Μ для передачі по лінії зв'язку до РПУ. Алгоритм роботи вузлів блоку висновку задається пристроєм керування УУ, тактові імпульси виробляються генератором ГТИ.
Структурна схема блоку уведення представлена на мал. 8.22. Сигнал з лінії зв'язку додається на демодулятор Д,з виходу якого послідовність імпульсів перетвориться в перетворювачі коду ПК у паралельні кодові комбінації. Ці кодові комбінації записуються в пристрої центральної пам'яті УЦП.
Адресна частина цих кодових комбінацій подається на пристрій керування УУ, а тексти з виходу УЦП — у пристрої індивідуальної пам'яті ИП1-ИПкожного керованого каналу. Запис у пристрої пам'яті ИП1-ИΠΝ проводиться по відповідному сигналі від УУ. Відповідно до обраного коду пристрій захисту кодів УЗК виробляє сигнал заборони або дозволу на прийом неспотворених кодових комбінацій. Синхронізація генератора тактових імпульсів ГТИ здійснюється від селектора тактових імпульсів СТИ.
Выводы. 1. Система телеконтролю й телекерування складається із блоків уведення й висновку інформації на диспетчерському пункті, лінії зв'язку й аналогічних блоків на РПУ.
2. Блок висновку інформації на ДП здійснює перетворення сигналів ТУ, їхнє кодування й модулювання у форму, придатну для передачі по лінії зв'язку. Блок уведення на РПУ містить зворотні перетворювачі, що декодируют і демодулирующие пристрою. Блок висновку на РПУ й блок уведення на ДП виконують аналогічні операції при передачі інформації ТС.
3. Для передачі повідомлень многим РПУ по загальному каналі зв'язку здійснюють ущільнення одного каналу зв'язку вторинними каналами.
8.8 Пристрою індикації
Типи індикаторів. Основна інформація про параметри приймача виводиться або на його передню панель, або на пульт оператора й відображається за допомогою індикаторних пристроїв (індикаторів). Найпоширенішої є індикація частоти настроювання приймача, що донедавна здійснювалося за допомогою шкали приймача, проградуированной в одиницях частоти й довжин хвиль. Оскільки розміри шкали обмежені, не вдавалося забезпечити точну індикацію частоти настроювання. У ранніх розробках приймачів пересування уздовж шкали стрілки, що показує частоту настроювання, здійснювалося механічним способом; у більше пізніх розробках знайшли застосування різні варіанти електронних шкал. На електронних шкалах частота настроювання може позначатися різними способами: цифрова індикація; за допомогою світного стовпа довжини, що змінюється; індекси відліку высвечиваются у вигляді кольорових прямокутників, що переміщаються уздовж шкали синхронно із частотою настроювання, і т.д. У цей час найбільше поширення знайшла цифрова індикація частоти, при якій числове значення частоти з високою точністю відображається безпосередньо цифровим індикатором. При цьому виміряється або частота настроювання (точніше - частота гетеродина), або при використанні в приймачі синтезатора частоти на індикаторі фіксується значення частоти, що відповідає установці перемикачів синтезатора.
У доачестве цифрових індикаторів в основному застосовуються светодиодные, катодно-люмінесцентні й жидкокристаллические. Доцільність застосування того або іншого індикатора залежить від умов експлуатації, механічних навантажень, джерел харчування й т.д. Так, для светодиодных індикаторів характерні: яскраве світіння, малі живлячі напруги й инерционность, великий термін служби; однак ці індикатори споживають значний струм. Все це визначило їхнє застосування в стаціонарних апаратурах. Так, наприклад, при експлуатації приймача в автомобілі виведена на передню панель інформація повинна легко читатися в будь-який час доби в затемненому салоні, при цьому індикатор повинен мати підвищену механічну міцність.
Катодно-люмінесцентні індикатори мають зелене або блакитне світіння досить великої яскравості, вони довговічні, однак вимагають значних анодних і сіткових напруг (до 25 У) і струмів розжарення (до 30—100 ма). Все це обумовило їхнє застосування в стаціонарних апаратурах. У приймачах, від яких вимагають мінімального або максимального-ощадливого споживання струму від джерел батарейного харчування, застосовуються, як правило, жидкокристаллические індикатори. Вони самі світло не випромінюють, а тільки переломлюють падаючий або минаючий через них світло, що обумовлює дуже малу споживану потужність. До того ж ці індикатори вимагають мала керуюча напруга, що дозволяє безпосередньо погодити їх із цифровими ИС.
Крім розглянутих знаходять застосування вакуумні люмінесцентні сигнальні знакосинтезирующие індикатори; вони мають катод прямого розжарення, анод складений зі светоизлучающих елементів. До їхніх достоїнств ставляться: сприятливий для сприйняття зелене світло достатньої яскравості, невисокі живлячі напруги. Однак виконання подібних індикаторів у скляних корпусах обумовлює їх малу механічну міцність.
Індикатори напруженості поля в крапці прийому можуть бути побудовані на основі стрілочного індикатора, светодиода, засобів відображення знакографической інформації на матричних екранах. Так, у японському приймачі CFR-V21 на жидкокристаллическом екрані може відображатися спектр будь-якої ділянки робочого діапазону з індикацією частот працюючих у цей момент радіостанцій. Візуально по спектрі інтенсивності напряженностей поля, створюваних радіостанціями в крапці прийому, можна визначити, яка із сусідніх станцій приймається краще.
На основі стрілочних, накальных і светодиодных індикаторів реалізуються індикатори стереобаланса для установки рівних потужностей на виході лівого й правого каналів, індикатори включення й контролю батареї харчування, індикатори наявності стереопередачи, індикатори режиму роботи приймача й т.д. При використанні в приймачі жидкокристаллического індикатора зручно виводити всю інформацію про стан РПУ на одному інформаційному полі, поєднуючи при цьому можливі відображення інформації.
Індикатори розташовують на передній панелі приймача таким чином, щоб їхні показання добре проглядалися при знаходженні рук користувача на будь-якому органі керування РПУ.
Розглянуті індикатори працюють від спеціальних електронних схем, напруга на вхід яких може подаватися з різних крапок схеми приймача. Як приклад розглянемо схеми широко застосовуваного в цей час цифрового індикатора частоти (ЦИЧ).
Цифрові індикатори частоти. На відміну від аналогових ЦИЧ мають високу точність і швидкодією виміру частоти; результати виміру частоти в ЦИЧ представляються у формі, зручної для подальшої її обробки. Функції, виконувані ЦИЧ у РПУ, можуть бути різними. У найпростішому варіанті ЦИЧ повинен зафіксувати набрану на тастатуре РПУ частоту. Більш складно виміряти частоту в певній крапці схеми приймача й зафіксувати значення обмірюваної частоти на індикаторі. У ряді приймачів ЦИЧ не тільки вимірює поточне значення частоти, але й порівнює його з необхідним значенням, записаним на згадку ЦИЧ, визначає різниця цих частот і виробляє цифру, пропорційну цієї різниці. Цифра з виходу ЦИЧ після перетворення в ЦАП може використатися для корекції частоти внутрішнього генератора. Звичайно цифровий частотомір разом з індикатором (семисегментным або одним многоразрядным) і з ланцюгами керування утворить блок цифрової шкали настроювання РПУ. Індикатори монтуються безпосередньо на передній панелі приймача.
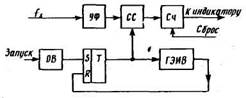
Принцип дії частотомірів полягає в підрахунку числа періодів вимірюваної частоти Т1 за еталонний проміжок часу Т0, що або виробляється в частотомірі, або подається на нього від зовнішнього джерела. У результаті вимірів визначається число N, пропорційне вимірюваній частоті f1: Ν=Τ0/Τ1= Tf1, де T1=1/f1.
Малюнок 8.23
Найпростіша структурна схема частотоміра представлена на мал. 8.23. Вимірювана частота f1 підводить до входу пристрою формування УФ. По команді «запуск» схема встановлюється у вихідний стан. Через час, необхідне для підготовки до вимірів, на виході одновібратора ПРО У виробляється сигнал, що перемикає тригер Т. При цьому на виході Τ з'явиться логічна одиниця, що відкриває схему збігу СС і запускає генератор еталонного інтервалу часу ГЭИВ. Через СС імпульси вимірюваної частоти, сформовані УФ, надходять на вхід лічильника СЧ. Лічильник уважає імпульси доти, поки через час Т імпульс із виходу ГЭИВ не поверне Τ у вихідний стан. На цьому процес виміру частоти закінчується, а число, підраховане лічильником СЧ, відповідає вимірюваній частоті. По команді «скидання» лічильник СЧ установлюється у вихідний стан.
Малюнок 8.24
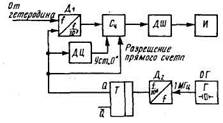
Існує велика кількість схем ЦИЧ. Так, на мал. 8.24 показана структурна схема ЦИЧ, що фіксує частоту гетеродина РПУ. Цей ЦИЧ складається із кварцового генератора ОГ, дільника частоти Д2,на виході якого діють коливання з еталонною частотою 1 Гц, JК-триггера Т, що диференціює ланцюга ДЦ, реверсивного лічильника СЧ,дешифратора ДШ й індикатора И. Імпульс еталонної частоти 1 Гц надходить на вхід Т, на виході Q тригера протягом 1 з діє сигнал логічної одиниці. Фронт імпульсу з виходу Q диференціюється ДЦ й обнуляет СЧ. Імпульс із виходу Τ надходить на вхід СЧ і дозволяє прямий рахунок.
Напряжение із частотою гетеродина надходить на дільник Д1 з коефіцієнтом розподілу 1000. Одночасно на Д1 подається сигнал з виходу Q,із цієї причини розподіл частоти в Д1 виробляється тільки під час дії на виході Q логічної одиниці. Після Д1 напруга прикладається до рахункового входу СЧ,у якому частота цієї напруги виміряється в кілогерцах і фіксується індикатором. Для перетворення двоїчно-десяткового коду СЧ у напругу, необхідне для індикатора, після СЧ коштує дешифратор ДШ.
Малюнок 8.25
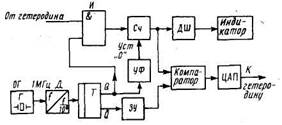
Ще один варіант ЦИЧ показаний на мал. 8.25. Цей ЦИЧ содер-
жит запам'ятовувальний пристрій ЗУ для запам'ятовування необхідної частоти
гетеродина, цифровий лічильник частоти гетеродина СЧ і кому
паратор, що порівнює поточне значення частоти гетеродина із за
писаним у ЗУ необхідним значенням частоти. До виходу компаратора підключається ЦЯЦЬ, що виробляє напругу підстроювання частоти гетеродина. У режимі підстроювання рівняються тільки останні розряди необхідного й поточного значень частоти. Схема ЦИЧ працює в такий спосіб. Від опорного генератора ОГ із частотою 1 МГц одержують послідовність імпульсів із частотою 1 Гц, що надходить на вхід JК-триггера. Імпульс тривалістю 1із із виходу Τ прикладається до схеми Я и одночасно до входу пристрою УФ формування імпульсу тривалістю 1 мкс, обнуляющего лічильник СЧ. На схему И подаються мпульсы із частотою гетеродина. Ці імпульси проходять у лічильник тільки при дії на вході И логічної одиниці з виходу Q тригера. З виходу СЧ цифровий сигнал обробляється в дешифраторі ДШ і фіксується в цифровому індикаторі.
У пам'яті ЗУ зберігається набір фіксованих частот, які може виробляти гетеродин приймача. На виході СЧ фіксується поточне значення частоти гетеродина. З виходу Q тригера Τ на ЗУ надходить сигнал дозволу зчитування. Три останніх розряди із ЗУ й зі СЧ подаються на компаратор, де відбувається їхнє порівняння. Помилка в цифровій формі надходить на ЦАП, з виходу якого сигнал в аналоговій формі прикладається до керуючої реактивності гетеродина.
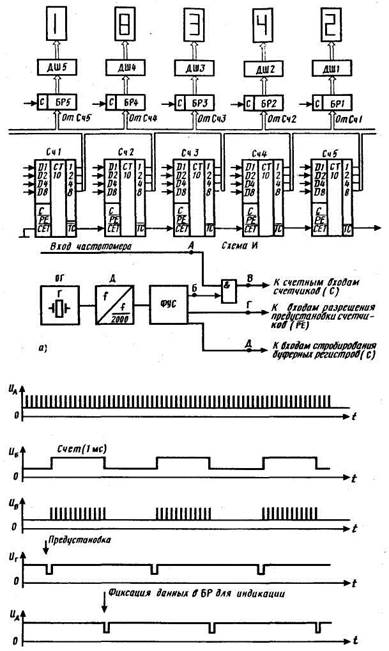
Приклад структурної схеми цифрової шкали показаний на мал. 8.26, а; на мал. 8.26, б показані тимчасові діаграми, що пояснюють її роботу. Припустимо, що цифрова шкала убудована у віщальний Кв-приймач із одним перетворенням частоти; значення ПЧ дорівнює 465 кгц, а вимірювати частоту настроювання приймача необхідно з точністю до одиниць кілогерців.
Основу цифрової шкали становлять п'ять швидкодіючих (з максимальною тактовою частотою 100 МГц) універсальних лічильників 1531ИЕ10 з можливістю предустановки. Кожен лічильник має чотири входи предустановки (Dl, D2, D4, D8), чотири інформаційних виходи (1, 2, 4, 8), на яких є присутнім 4-розрядне двійкове число, що відповідає поточному стану лічильників (від 0 до 9), рахунковий вхід З, що управляють входи предустановки РЕ (при подачі на один з них логічного нуля при надходженні чергового тактового імпульсу на вхід З відбувається предустановка лічильника — його перехід у стан, обумовлений числом на входах D1, D2, D4, D8), вхід переносу від лічильника попереднього розряду СЕТ і вихід переносу ТС, з якого сигнал переносу надходить на лічильник більше старшого розряду, викликаючи зміну стану цього лічильника на одиницю. Вхід СІРИЙ лічильників, не показаний на мал. 8.26, повинен бути підключений до землі, а вхід SR — до харчування.
На дільник Д и формувач керуючих сигналів ФУС (див. мал. 8.26, а) від опорного кварцового генератора ОГ подається опорна послідовність прямокутних імпульсів із частотою повторень 1 Мгц. З виходу дільника на 2000 сигнал меандру із частотою повторень 500 Гц (крапка Б) подається на один із двох входів схеми збігу — схеми И. Протягом половини періоду цього сигналу (1 мс) схема И відкрита, і вхідна імпульсна послідовність (від формуючого пристрою, що перетворить сигнал з виходу гетеродина в імпульсну послідовність із частотою повторення, рівній його частоті), що надходить на другий вхід схеми И (крапка А), подається на рахункові входи Із всіх лічильників (крапка В). Лічильники працюють у режимі додавання. Таким чином, у момент закінчення інтервалу рахунку в лічильниках, якщо в момент початку інтервалу всі вони перебували в нульовому стані, буде втримуватися кількість вхідних імпульсів, що надійшли за інтервал, тобто значення вимірюваної частоти коливань гетеродина в кілогерцах. Протягом іншої половини періоду сигналу на вході И (крапка Б) схема И закрита й уміст лічильників не змінюється.
Малюнок 8.26
На виході ФУ З діють імпульси предустановки (крапка Г), що підготовляють лічильники до чергових циклів рахунку, а також сигнал фіксації отриманих у результаті рахунку даних у буферних регістрах БР1-БР5(крапка Д), що подається на входи стробирования БР. Зафіксовані дані з виходів БР подаються на дешифратори ДШ1-ДШ5, що перетворять двоїчно-десяткові цифри обмірюваного значення частоти (з урахуванням значення ПЧ) у керуючі сигнали індикаторів, на яких постійно відображається поточне значення частоти настроювання приймача в кілогерцах.
Урахувати значення ПЧ для одержання щирого значення частоти настроювання приймача можливо в такий спосіб. Нехай fc>fг,тоді при fпр = 465 кгц fc = fг + 465 [кгц]. Якщо на початку циклу рахунку в лічильники записати число 465, то наприкінці циклу при частоті гетеродина, наприклад, 25 311 кгц у лічильниках буде перебувати число 465 + 25 311 = 25 776, тобто значення частоти настроювання приймача. При fc<fгfc = fг — 465 [кгц]. У цьому випадку перед циклом рахунку в лічильники необхідно записати доповнення числа 465 до числа 100 000 можливих станів пристрою, що складає з п'яти послідовно з'єднаних десяткових лічильників. Одержуємо число 99 535 (100 000 — 465), після запису якого в лічильники починається цикл рахунку. Нехай частота гетеродина дорівнює 12 769 кгц. Після приходу 465 вхідних імпульсів з моменту початку рахунку лічильники, працюючи в режимі додавання, перейдуть у нульовий стан і рахунок буде продовжений. Після приходу інших 12 304 імпульсів (465 + 12 304 = 12 769) у момент закінчення циклу рахунку в лічильниках буде зафіксоване число 12 304, що відповідає значенню частоти настроювання приймача (у кілогерцах) при fc<fг. У табл. 8.1 показані логічні рівні, які необхідно постійно подавати на входи предустановки (Dl, D2, D4, D8) лічильників для кожного із двох розглянутих випадків.
В Кв-приймачах з багаторазовим перетворенням частоти й з високої першої ПЧ можливий і третій випадок, коли fnp=fc+fгй, отже, fc=fпр-fг. У цьому випадку лічильники працюють у режимі вирахування, а в результаті предустановки в них записується значення проміжної частоти.
Якщо приймач працює тільки в одному із трьох названих режимів,
те число для предустановки у двійковій формі (див. мал. 8.26, а) постійно подається на входи предустановки 1, 2, 4, 8 лічильників, тобто кожен такий вхід або заземлюється (логічний нуль), або підключається до провідника харчування лічильників (+5 У — логічна одиниця) звичайно через токоограничивающий резистор.
Значение першої ПЧ у деяких приймачах може мінятися залежно від поддиапазона. У цьому випадку необхідно передбачити можливість перемикання логічних рівнів на входах предустановки лічильників синхронно з перемиканням поддиапазона. Взаємодія ОМЭВМ із блоком цифрового частотоміра розглянуте в § 8.9.
Висновки. 1. Основна інформація про параметри приймача відображається або на його передній панелі, або на пульті оператора за допомогою індикаторних пристроїв.
2. Одним з основних є індикатори частоти на
будівництва. У цей час основне застосування знайшла циф-
ровая індикація частоти.
3. Цифрові індикатори частоти забезпечують високі точність і швидкодія виміру частоти; результати виміру частоти в ЦИЧ представляються у формі, зручної для подальшої її обробки.
8.9Застосування мікропроцесорів для контролю й керування роботою приймачів
Загальні положення. Автоматизовані РПУ вимагають застосування пристроїв, що виключають участь людини в процесі керування й контролю. Широке впровадження технологічно нової елементної бази - більших інтегральних схем (БІС) і цифрових методів обробки сигналів - дозволило створити подібні пристрої на базі мікропроцесорів (МП) - цифрових пристроїв із програмувальною логікою й мікропроцесорними системами (МШС), основу яких становлять МП.
Функції МШС, що входить до складу РПУ, в основному містять у собі: автоматизацію процесів керування РПУ; визначення параметрів стану даного вузла; зміна його стану; комутацію окремих блоків по програмі МП. Незалежно від функціонального призначення вузла визначення параметрів його стану зводиться до збору й обробки інформації, що надходить від різних блоків, що становлять даний вузол. При цьому для різних за структурою й функціями вузлів МП обробляє різне число інформаційних сигналів. Для зміни стану будь-якого вузла потрібне певне число керуючих сигналів, що відповідає даній структурі.
Мікропроцесорні системи являють собою цифрові пристрої у вигляді однієї або декількох БІС у сполученні з інтегральними схемами (ИС) середнього або малого ступеня інтеграції, а також з дискретними елементами. Відмінністю МШС від пристроїв із твердою логікою, у яких алгоритм функціонування задається шляхом їхнього з'єднання в певну незмінну схему, є те, що в МШС алгоритм роботи задається програмою, що за бажанням споживача можна змінити.
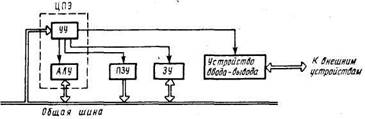
Малюнок 8.27
Структурна схема МШС (мал. 8.27) у загальному випадку складається з: арифметико-логічного пристрою АЛУ, постійних й оперативного запам'ятовувальних пристроїв ПЗУ й ОЗУ, пристрою керування УУ й пристрою уведення — висновку. Блок, відзначений на мал. 8.27 пунктиром, являє собою функціонально закінчений пристрій, називаний центральним процесорним елементом ЦПЭ й реалізованим звичайно у вигляді окремої БІС. Постійний запам'ятовувальний пристрій необхідно для зберігання програми, вихідних даних, а ОЗУ - для запису й зберігання вхідних і вихідних даних і проміжних результатів обчислень; ПЗУ, що зберігає набір команд програми, звичайно виконується у вигляді окремої БІС. Окремі пристрої МШС, що перебувають як усередині ЦПЭ, так і поза ним, з'єднані між собою загальною шиною - набором проводів, по яких передаються дані у вигляді двійкових сигналів від одного пристрою МШС до іншого. Зв'язок із зовнішніми стосовно МГТС пристроями й системами здійснюється через пристрій уведення - висновку. Таких пристроїв у МШС може бути трохи і їх часто називають портами уведення - висновку.
Дата добавления: 2016-03-27; просмотров: 1381;