6 страница. потрібний піддіапазон, установлюються необхідні частоти гетеродинів і здійснюється перебудова резонансних ланцюгів у межах обраного піддіапазон
Малюнок 8.6
потрібний піддіапазон, установлюються необхідні частоти гетеродинів і здійснюється перебудова резонансних ланцюгів у межах обраного піддіапазон. Після закінчення настроювання виробляється спеціальний сигнал, що свідчить про готовність РПУ до прийому.
Класифікацію систем настроювання можна провести, виходячи із загальних принципів автоматичного регулювання, в основі яких лежить використання різниці, що виходить при порівнянні заданого значення параметра зі значенням регульованого параметра, для компенсації відхилення значення регульованого параметра. Більшість систем автоматичного настроювання РПУ залежно від застосовуваних способів керування можна розділити на електромеханічні, електронні й електронно-електромеханічні або комбіновані. В електромеханічних системах звичайно використається двигун, а настроювання здійснюється за допомогою КПЕ. В електронних системах електромеханічні пристрої виключені. При цьому електронна система настроювання може бути реалізована на основі аналогових і цифрових пристроїв (аналогового й цифрового електронного настроювання). До комбінованих систем можна віднести, наприклад, приймачі, у яких керуюча напруга для варикапів знімається з потенціометра, що обертає мотором.
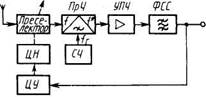
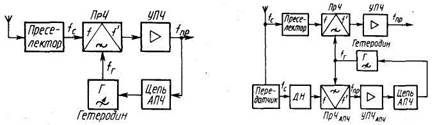
В однієї з можливих систем настроювання приймача перебудові піддаються селективні ланцюги преселектора (мал. 8.6) доти, поки проміжна частота на виході фільтра зосередженої селекції ФСС не стане рівної номінальної. При цьому ланцюгом керування ЦУ формує ся
Малюнок 8.7
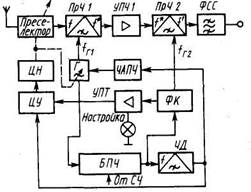
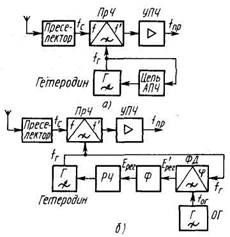
команда, по якій ланцюг настроювання ЦН фіксує необхідні значення настроєних елементів преселектора. Ця система настроювання працездатна тільки при прийомі корисного сигналу. Крім того, у такій системі в режимі прийому відсутнє спостереження за сполученням гетеродина (синтезатора частот СЧ) і преселектора, що може привести до зміни основних показників радіо тракту приймача. Більше широке застосування знайшли системи з одночасною перебудовою резонансних ланцюгів преселектора й гетеродина. Припустимо, що в приймачі застосоване подвійне перетворення частоти (мал. 8.7), що обумовлює наявність у його радіо тракті двох перетворювачів частоти ПрЧ1 і ПрЧ2. При зміні частоти прийому ланцюг керування ЦУ включає ланцюг настроювання ЦН, що забезпечує зворотно-поступальну перебудову резонансних ланцюгів преселектора й першого гетеродина Г. Напруга із частотою fг1надходить на ПрЧ1 приймача й на блок перетворення частоти БПЧ першого гетеродина, на який одночасно надходять частоти від синтезатора частот СЧ, що змінюються залежно від значення частоти сигналу. Перебудова Г ведеться доти, поки частота напруги на виході БПЧ не потрапить у смугу пропущення фільтра компенсації ФК, настроєного на частоту fг2другі гетеродини; при перебудові приймача частота fг2постійна. Починаючи із цього моменту відбувається перемикання РПУ з режиму пошуку в режим частотного автопідстроювання (ланцюг ЧАПЧ), що закінчується, як тільки рівень сигналу керування з виходу дискримінатора ЧД стане менше зони нечутливості.
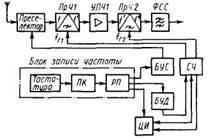
В приймачах все більше застосування знаходить цифрове електронне настроювання (мал. 8.8). Після набору на клавіатурі необхідного значення прийнятої частоти на виході блоку запису (див. мал. 8.5) з'являється певна комбінація логічних нулів й одиниць, по якій блок вироблення керуючої напруги БУС виробляє сигнал
Малюнок 8.8
керування для резонансних ланцюгів преселектора. При фільтровому настроюванні під дією цього сигналу комутирується необхідний фільтр вхідного пристрою; при плавній або дискретній перебудові резонансних ланцюгів преселектора комутирується необхідний піддіапазон і подається необхідна напруга на перебудовують елементи, що. При варикапній настроюванню БУС виробляє напругу, що забезпечує необхідні ємності варикапів; при настроюванні за допомогою магазина дискретних конденсаторів БУС виробляє сигнал керування для потрібної комутації конденсаторів. Блок керування БУД виробляє по комбінації логічних нулів й одиниць на виході блоку запису частоти сигнал керування, що встановлює потрібний коефіцієнт розподілу дільника в ланцюгах ФАПЧ синтезатора частот СЧ. При цьому на виході синтезатора встановлюються напруги гетеродинів з необхідними частотами. Частота висвітлюється на цифровому індикаторі ЦИ. На відміну від аналогових цифрові індикатори частоти мають високу точність і швидкодією виміру частоти; результати виміру частоти в ЦИ представляються у формі, зручної для подальшої її обробки. Функції, виконувані ЦИ в РПУ, можуть бути різними. У найпростішому варіанті ЦИ по коду, що знімає, наприклад, з виходу блоку запису частоти (мал. 8.8), фіксує набрану на клавіатурі частоту. У ряді РПУ ЦИ не тільки вимірює поточне значення частоти, але й порівнює його з необхідним значенням, записаним у його пам'ять, визначає різниця цих частот і виробляє число, пропорційне цій різниці, що після перетворення в ПАП може використатися для корекції частоти внутрішнього генератора приймача.
Синтезатори частот. Через нестабільність частоти настроювання доводиться розширювати смугу пропущення приймача, що викликає різке погіршення його селективності. Зміна частоти настроювання приймача приводить до перекручування сигналу, що впливає на завадостійкість прийому. Однієї із причин нестабільності частоти настроювання в приймачі, досить легко переборної, є зміна в часі параметрів електричних ланцюгів внаслідок зміни зовнішніх умов, старіння, механічних струсів і вібрацій і т.д. Головною причиною частотної нестабільності РПУ дотепер залишаються випадкові зміни частот гетеродинів (особливо частоти першого гетеродина), ведучі до змін проміжних частот. Крім стабільності гетеродини РПУ повинні забезпечити малий час перебудови з однієї частоти на іншу.
Використання в гетеродинах діапазонних стабілізованих LC-генераторів не дозволяє реалізувати стабільність краще 10-4. У високоякісних приймачах високостабільні гетеродини виконуються на основі генераторів із кварцовою стабілізацією. Створені на сучасних підсилювальних напівпровідникових приладах з термостатуванням на основі високочастотних кварцових пластин такі опорні генератори (ОГ) дозволяють реалізувати стабільність 10-8 – 10-9. Відзначимо, що такі ОГ разом із пристроєм термостатування, що генерують коливання однієї частоти, являють собою досить складні й дорогі пристрої. Тому недоцільно для прийому сигналу кожної станції застосовувати окремий кварцовий генератор, тому що це збільшить в ціні приймач і зробить його громіздким.
Найбільше застосування в приймачах для стабілізації частот знайшли пристрої, що включають у себе високостабільний ОГ, генератор гармонік частоти ОГ (ГГ) і ланцюга синтезу вихідних частот (синтезатор З). Застосування синтезатора частот поряд з підвищенням стабільності частоти й скороченням часу настроювання дозволило автоматизувати настроювання, здійснювати її по заданій програмі при місцевому й дистанційному керуванні, підвищити надійність приймачів.
Сітка вихідних частот у синтезаторі частот може бути отримана методами прямого й непрямого синтезу. Метод прямого синтезу полягає в тому, що будь-яка необхідна частота гетеродина формується із частоти одного високостабільного ОГ шляхом її простих перетворень - множення, розподілу, додавання й вирахування. При цьому синтезатор може складатися із пристроїв одного типу, наприклад суматорів, або комбінації пристроїв. Стабільність частот коливань на виході визначається стабільністю еталонної частоти ОГ. Як правило, фільтрація коливання на виході подібних синтезаторів забезпечується без застосування ФАПЧ. При використанні методів непрямого синтезу сітка вихідних частот виходить підсумовуванням, множенням або розподілом гармонік частоти ОГ із застосуванням допоміжного генератора. Характерним для цього методу є наявність петлі ФАПЧ, що забезпечує високу спектральну чистоту вихідної напруги. Синтезатори частот, побудовані на основі методів прямого або непрямого синтезу, можуть бути реалізовані повністю на аналогових елементах або на основі цифрової елементної бази.
Висновки. 1. Настроювання приймача на частоту сигналу містять у собі установку необхідних частот гетеродинів і настроювання резонансних ланцюгів преселектора на частоту сигналу.
2. Для комутації радіочастотних ланцюгів служать геркони й напівпровідникові комутаційні діоди.
3. Як елементи настроювання використаються варикапи, дискретні конденсатори, КПЕ, дискретні котушки індуктивності й варіометри.
4. Перемикання фільтрів вхідного ланцюга й піддіапазонів у приймачах з автоматичним настроюванням складається з вироблення сигналу керування для ланцюга перемикання й комутації селективних ланцюгів або їхніх реактивних елементів. Сигнал керування виробляється після набору на клавіатурі значення необхідної частоти сигналу або після відповідної установки перемикачів синтезатора частот.
5. Ланцюг або пристрій автоматичного настроювання приймача забезпечує перемикання й регулювання всіх необхідних елементів приймача при переході з однієї частоти на іншу по заданій команді і їхньому підстроюванні для забезпечення необхідної точності настроювання при впливі дестабілізуючих факторів.
6. Як гетеродини широко використаються синтезатори частот, у яких необхідна частота гетеродина виходить із частоти одного високостабільного генератора методами прямого або непрямого синтезу.
8.5 Автоматичне підстроювання частоти
Принцип дії й види систем АПЧ.Автоматичне підстроювання частоти (АПЧ) повинна забезпечити необхідну точність настроювання приймача при впливі дестабілізуючих факторів. Випадкові зміни частоти fг гетеродина (див. § 8.4) приводять до змін проміжної частоти fпр = fг — fс. Тому завдання АПЧ зводиться до підстроювання частоти гетеродина для точної відповідності частоти fпр, частоті, на яку настроєний тракт ПЧ, тобто fпр = fпр0.
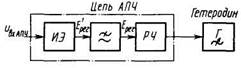
Для АПЧ уводиться спеціальний ланцюг АПЧ (мал. 8.24), що складається з вимірювального елемента ИЭ, фільтра й регулятора частоти РЧ. Вимірювальний елемент виробляє напруга регулювання Ерег. Залежно від виду ИЭ розрізняють частотні (ЧАПЧ) і фазові (ФАПЧ) системи АПЧ. У системах ЧАПЧ вимірювальний елемент оцінює відхилення частоти напруги на вході ланцюга АПЧ від еталонного значення; у якості ИЭ використається частотний детектор. У системах ФАПЧ вимірювальний елемент — це фазовий детектор, що оцінює відхилення фази напруги на вході ланцюга АПЧ від фази еталонного (опорного) напруги. Фільтр у ланцюзі АПЧ за аналогією з фільтром АРУ не пропускає швидких (корисних) змін Е'рег, а пропускає лише повільні зміни Е'рег, пов'язані з відходом частоти гетеродина. Регулятор (управитель) частоти забезпечує підстроювання частоти гетеродина.
Малюнок 8.9
Залежно від крапки, до якої в ланцюгах приймача підключена ланцюг АПЧ, розрізняють два види пристроїв АПЧ. Пристрій
АПЧ, що підтримує постійної fпр, дане на мал. 8.10. Оскільки
fпр = fг – fс, тобто ПЧ дорівнює різниці частот гетеродина й сигналу,
такі пристрої АПЧ називають різницевими. У цьому пристрої ланцюг АПЧ підключається до виходу УПЧ приймача (мал. 8.10). З появою відхилення ПЧ від номінального значення fпр0 виробляється напруга Ерег, що підбудовує частоту гетеродина. Пристрій різницевої АПЧ працездатний тільки при наявності на вході приймача сигналу.
Малюнок 8.10 Малюнок 8.11
У цьому випадку АПЧ забезпечує підстроювання приймача як при зміні частоти гетеродина fг, так і при зміні частоти сигналу fс у передавачі. Двоканальна системи різницевої частоти (мал. 8.11) застосовні при розташуванні передавача поруч із приймачем, що характерно, наприклад, для радіолокаційних станцій. Для підстроювання створюється другий канал; оскільки від передавача надходить сильний сигнал, його необхідно послабити дільником напруги ДН. На виході перетворювача частоти ПРЧАПЧдругого каналу утвориться напруга із частотою fпр, що після посилення в УПЧАПЧ надходить у ланцюг АПЧ. Пристрій (див. мал. 8.11) працездатно при відсутності сигналу на вході приймача. Структурні схеми АПЧ, що підтримують постійної частоту fг, показані на мал. 8.12, а, б. Такі пристрої АПЧ працездатні при відсутності сигналу, однак вони не усувають змін fпрчерез зміни частоти сигналу.
Ланцюг частотної АПЧ (мал. 8.12, а) містить у собі частотний детектор, фільтр і регулятор частоти. Фазова АПЧ (мал. 8.12, б) дозволяє зрівняти фази коливань гетеродина й опорного генератора ОГ. Як вимірювальний елемент у ФАПЧ використають фазовий детектор Φ Д. Напруга Ерегу ФАПЧ залежить від зрушення фаз між коливаннями що підбудовує й опорного генераторів. У порівнянні із ЧАПЧ фазова АПЧ більше чутлива, тому що реагує навіть на найменші розбіжності частот. Залежно від виду регулятора частоти розрізняють електронні й електромеханічні системи АПЧ. В електронних
Малюнок 8.12
системах АПЧ як регулятор частоти використається варикап, в електромеханічних — КПЕ. Найбільше поширення на практиці знайшли електронна частотна й фазова АПЧ.
В приймачах із цифровий АПЧ напругу гетеродина подається на цифровий лічильник, що перетворить його частоту в частоту прийнятого сигналу, фіксуючи її цифровим індикатором з необхідною точністю індикації. Лічильник запам'ятовує встановлену на Індикаторі частоту. При відповідній команді з пульта керування в суматорі складається (віднімається при перетворенні нагору) код частоти гетеродина з кодом проміжної частоти. У результаті виходить код частоти настроювання. У пристрої порівняння кодів від суматора й лічильника виробляється сигнал помилки, знак якого визначає підстроювання частоти гетеродина.
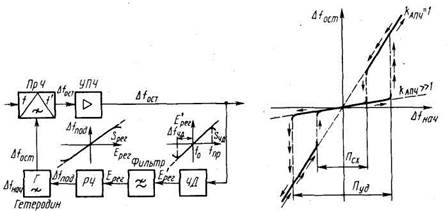
Електронна ЧАПЧ приймачів безперервних сигналів. УЧАПЧ як вимірювальний елемент (мал. 8.13) використається частотний детектор ЧД, еталонної є частота f0 нульової крапки характеристики детектування Eрег=F (fпр) ЧД. Високі вимоги до стабільності нульової крапки виконати просто, оскільки ЧД працює на низькій частоті й абсолютній нестабільності частоти f0, як правило, невелика. Як регулятор частоти РЧ застосовується варикап.
Припустимо, що через дію дестабілізуючих факторів частота гетеродина fг змінилася на ∆fнач (розгляд при зміні частоти сигналу на ∆fс аналогічно). Після спрацьовування системи ЧАПЧ відбувається підстроювання гетеродина, у результаті чого його розлаштування зменшується на ∆fпод. У сталому режимі ∆fост = ∆fнач — ∆fпод, де ∆fост — залишкова розлаштування частоти гетеродина після встановлення процесів у системі ЧАПЧ.
Розлаштування ∆fост на виході УПЧ викликає поява напруги Е'регна виході ЧД.
Малюнок 8.13 Малюнок 8.14
Якщо характеристика детектування ЧД лінійна й має крутість SЧД(див. мал. 8.13), то Ерег= SЧД ∆fост. Після фільтра з коефіцієнтом передачі по постійному струмі Кфнапруга Ерег=КфЕрег=КфSЧД∆fост. Напруга Ерегробить підстроювання частоти гетеродина. Якщо вважати характеристику РЧ лінійної із крутістю Sрег, то ∆fпод =SрегEрег=SрегSЧДKф∆fост. З огляду на, що ∆fост = ∆fнач - ∆fпод, одержуємо ∆fост = ∆fнач –SрегSЧДKф∆fост або
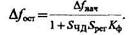 (8.3)
(8.3)
Згідно (8.3), ланцюг АПЧ зменшує ∆fначв kАПЧраз, де kАПЧ = (∆fнач)/( ∆fост)=l+SЧДSрегKф— коефіцієнт підстроювання. У реальних ланцюгах ЧАПЧ kАПЧ≈ 20—50. Побудуємо залежність ∆fост = F(∆fнач) (мал. 8.14), скориставшись для цього формулою (8.3). Якщо АПЧ відсутній, то kАПЧ = 1 й ∆fост = ∆fнач; якщо АПЧ працює, то kАПЧ »1 і кут нахилу прямій ∆fост =F (∆fнач) зменшується. Якщо врахувати реальні характеристики ЧД і РЧ, то залежності ∆fост =F (∆fнач) істотно міняються.
Розглянемо фізикові процесу підстроювання приймача. Будемо вважати, що зі зміною частоти fг процес устигає встановитися. Якщо при працюючої АПЧ частота fг відхиляється від номінального значення, то ∆fнач і відповідно ∆fост збільшуються по прямій мал. 8.14 при kАПЧ »1. З ростом ∆fост = |fпр — f0|напруга Ерег. збільшується. Однак при перевищенні ∆fост значення ∆fЧД (характеристика Eрег=F (fпр) на мал. 8.13) напруга Ерегпочинає зменшуватися більш різко — процес збільшення ∆fост стрімко наростає, що приводить до зриву АПЧ і відповідно до переходу із прямої при kАПЧ »1 на пряму при kАПЧ = 1. До зриву АПЧ ∆fост <∆fЧД) після зриву АПЧ ∆fост = ∆fнач»∆fЧД. Припустимо, що при непрацюючої АПЧ частота гетеродина fг починає зменшуватися при kАПЧ = 1; при цьому ∆fнач = ∆fост. Зі зменшенням fг, ∆fначй ∆fост зменшуються; коли ∆fост стане менше ∆fЧД, напруга Е'регпочинає стежити за знаком зміни частоти fг, що приводить до лавиноподібному відновлення роботи АПЧ. Таким чином, ланцюг АПЧ працює, якщо відхилення частоти ∆fост не перевищує значення ∆fЧД. Для працюючої АПЧ ця умова виконується при ∆fост = ∆fнач / kАПЧ, і зрив відбувається при ∆fост = ∆fЧД = ∆fнач / kАПЧ, тобто при ∆fнач =∆fЧД kАПЧ . Смугу пропущення Пуд= 2∆fнач, при виході за яку АПЧ перестає працювати, називають смугою втримання. Система АПЧ починає працювати при ∆fнач= ∆fост = ∆fЧД. Смугу пропущення Пуд = 2∆fнач,при якій відбувається відновлення АПЧ, називають смугою схоплювання. Для ланцюга АПЧ виконується умова Пуд »Псх. Криві залежностей мал. 8.14 при зриві й відновленні АПЧ не відповідають дійсному ходу процесу, оскільки він нестійкий.

Малюнок 8.15
8.6 Регулювання смуги пропущення
У радіомовних приймачах регулювання смуги пропущення здійснюється в післядетекторній частині (у приймачах звукового радіомовлення, головним чином для зміни тембру звучання), у професійних радіоприймальних апаратурах - у тракті проміжної частоти й у ряді випадків - у післядетекторній частини. Регулювання виконується як плавно, так і дискретно.
Регулювання смуги в тракті проміжної частоти РПУ. Основне призначення даного виду регулювання - ослаблення сильних перешкод. Найпростіший спосіб регулювання смуги складається в зміні еквівалентного загасання контуру резонансного УПЧ шляхом підключення до нього резистора з регульованим опором, що змінює коефіцієнт підсилення резонансного підсилювача. Як показано в § 3.8, розширення АЧХ зі збільшенням зв'язку між контурами можна використати для регулювання смуги пропущення фільтра (див. мал. 3.29). Змінювати зв'язок між контурами можна як механічним, так й електронним способами. Регулювання може виконуватися також зміною взаємної розлагодженість резонансних каскадів багато каскадного підсилювача (див. § 3.6). Найбільше часто застосовується дискретне регулювання смуги пропущення УПЧ за допомогою фільтрів (кварцових, пьєзокерамічних, монолітних й ін.), що включають залежно від виду прийнятого сигналу й різних смуг, що мають, пропущення й середніх частот настроювань (див. § 12.2).
Малюнок 8.16
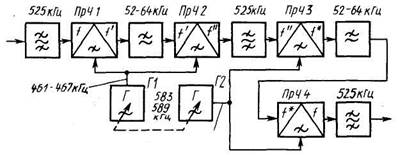
Можна використати фільтр зі змінною смугою пропущення (мал. 8.16). Сигнал із частотою 465 кГц і максимальною шириною спектра ± 6 кГц спочатку перетвориться в сигнал зі спектром частот від 52 до 64 кГц. Навантаженням першого перетворювача ПрЧ1 є ФНЧ, АЧХ якого має крутий спад на частоті 64 кГц. Цей спад визначає один із країв результуючої АЧХ усього фільтра. Потім сигнал зі спектром частот від 52 до 64 кГц знову перетвориться на частоту 465 кГц у ПрЧ2 і надходить далі на перетворювач частоти ПрЧЗ. Частота коливання, що подається від генератора Г1 на ПрЧ1 і ПрЧ2, перебуває в діапазоні 401—-407 кГц. При цьому сигнал перетвориться в діапазон частот 52— 64 кГц, але через те, що частота гетеродина Г2 відрізняється від частоти гетеродина Г1 при перших двох перетвореннях, здійснюється інверсія спектра. Навантаженням перетворювача ПрЧЗ служить ФНЧ із частотою зрізу 64 кГц. Цей фільтр придушує складового спектра сигналу, що перебували після перетворення в частоти 52 кГц. Спад АЧХ другого ФНЧ формує другий край результуючої АЧХ фільтра. Далі спектр сигналу знову переноситься в ПрЧ4 на частоту 465 кГц.
Малюнок 8.17
Частота коливання, що подається від генератора Г2 на ПрЧЗ і ПрЧ4, міняється від 529 до 523 кГц. Регулювання результуючої смуги пропущення фільтра досягається зміною зрушення між частотами двох гетеродинів. Наприклад, при ширині смуги пропущення 2 кГц гетеродини настроєні на частоти 402 й 528 кгц. Фазова характеристика фільтра симетрична щодо середньої частоти.
8.7 Дистанційне керування й контроль
Впровадження електронних засобів регулювання параметрів, характеристик і режимів приймача дозволяє здійснювати керування приймачем на відстані. Таке керування, називане дистанційним, широко використається як у побутових, так й у професійних приймачах.
Дистанційне керування радіомовними приймачами.Таке керування приймачем, що перебуває в одному приміщенні зі слухачем на відстані в кілька метрів, створює для слухача підвищені зручності. Не підходячи до приймачу, слухач має можливість включити й виключити приймач, настроїти його на потрібну станцію, регулювати тембр і гучність передачі й т.д. Особливо зручно дистанційне керування установкою стереобаланса, оскільки її необхідно робити щодо місця прослуховування прийнятої програми.
У радіомовних приймачах для дистанційного керування використаються ультразвукові й інфрачервоні коливання. По економічних міркуваннях і швидкодії найбільше застосування знайшли інфрачервоні лінії керування із застосуванням імпульсно-кодової модуляції. Інфрачервоні коливання добре поглинаються стінами приміщення й розташованої в ній меблями, при цьому практично не створюються впливи, що заважають, пристроям, що перебувають в інших приміщеннях; вони нешкідливі для здоров'я людей.
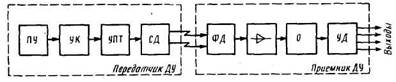
Структурна схема ДУ з використанням джерела ИК показана на мал. 8.18. Необхідна для керування приймачем інформація набирається слухачем на ПУ, сигнали керування з його виходу після перетворення пристроєм кодування КК подаються на підсилювач постійного струму УПТ для забезпечення необхідної дальності дії. Після посилення в УПТ імпульсно-кодова послідовність впливає на світодіод СД, що випромінює ИК імпульси в напрямку фотодіода ФД, що перебуває на керованому приймачі. Прийняті ФД імпульси підсилюються, відфільтровується від перешкод (через прямі сонячні промені, електрообігрівачів й освітлювальних приладів і т.д.), обмежуються по амплітуді в обмежнику О и декодуються в пристрої дешифрації команд УД, з виходів якого надходять на відповідні ланцюги регулювань РПУ. У приймачах з мікропроцесорним керуванням пульт ПУ може частково або повністю дублювати панель керування приймачем (див. § 8.9).
Найбільше широко ДУ застосовується в телевізійних приймачах, музичних центрах і комплексах. Як приклад розглянемо ДУ вітчизняним телевізійним приймачем. Керування забезпечується на відстань 5 - 6 м. Система ДУ дозволяє переводити телевізійний приймач (ТП) із чергового режиму (система ДУ працює в режимі, що чекає, а ТП виключений) у робітник (ТП включений), вибирати кожної із прийнятих каналів (програм), установлювати яскравість, контрастність і колірну насиченість зображення, включати й виключати звук, регулювати його гучність, виключати ТП і т.д.
Малюнок 8.18
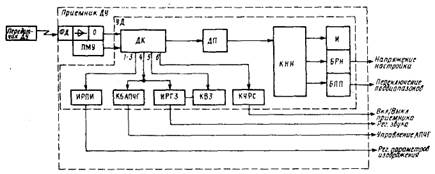
Типова структурна схема ДУ ТП показана на мал. 8.19. Передавач ДУ відповідно до набирають на клавіатурі ПУ командами керування формує кодову послідовність модульованих ИК імпульсів, підсилює й випромінює їх у напрямку приймача. Інформація про кожну команду втримується у відповідному наборі різних інтервалів часу між імпульсами у випромінюваній послідовності. Модульовані ИК- імпульси приймаються ФД, підсилюються, обмежуються, відфільтровується від перешкод і подаються на дешифратор команд ДК. На ДК подаються сигнали й від панелі місцевого керування ПМУ,
Малюнок 8.19
повністю або частково дублюючої ПУ в передавачі ДУ. У порівнянні з ДУ ПМУ має більше високий пріоритет. У ДК імпульсна послідовність від ДУ або ПМУ декодуються й залежно від переданої команди змінюється стан відповідного його висновку або групи висновків. Так, наприклад, при регулюванні параметрів зображення (яскравості, контрастності або насиченості кольорів) змінюється шпаруватість імпульсів на відповідному висновку 1, 2 або 3 ДК, внаслідок чого міняється рівень постійної складової напруги на виході відповідного інтегратора регулювання параметра зображення ИРПИ. Виходи ИРПИ заведені в касету обробки сигналу в модулі кольоровості ТП, з якого ці напруги надходять на керуючі входи електронних регуляторів контрастності, яскравості й насиченості.
Таким же чином здійснюється ДУ регулюванням гучності звуку, напруга регулювання при цьому знімається з інтегратора регулювання гучності звуку ИРГЗ і подається на керуючий вхід електронного регулятора гучності в ТП. Для виключення можливості настроювання ТП на проміжний між перемикачем канал (якщо такий є) при перемиканні каналів за допомогою ключа КБ АПЧГ блокується АПЧ гетеродина й за допомогою ключа КВЗ вимикається на час перемикання каналів звук. Для керувань КБ АПЧГ і КВЗ ДК може мати окремі виходи. Можна, як це показано на мал. 8.19, надійти в такий спосіб. При перемиканні каналу на виході 4 ДК у ДУ на час перемикання з'являється логічний нуль, що, впливаючи на ИРГЗ, виключає звук на час перемикання, до того ж він використається також для керування КБ АПЧГ. Однак для забезпечення вимикання звуку при включеній програмі, щоб при цьому не блокувалася система АПЧГ, необхідно використати для цієї мети тригер (висновок 5 ДК), що управляє роботою КВЗ. КВЗ впливає тільки на ИРГЗ і не впливає на КБ АПЧГ. Таким чином, при перемиканні каналу блокується система АПЧГ і вимикається звук на час перемикання програми, а при вимиканні звуку спеціальною командою з передавача ДУ спрацьовує тригер, на виході 5 ДК з'являється напруга, під дією якого звук відключається, а система АПЧГ продовжує функціонувати.
Дата добавления: 2016-03-27; просмотров: 1355;