8 страница. З погляду розроблювача РПУ вся МШС контролю й керування його роботою може бути представлена як набір регістрів - пристроїв для запису
З погляду розроблювача РПУ вся МШС контролю й керування його роботою може бути представлена як набір регістрів - пристроїв для запису, зберігання й наступного зчитування з них многоразрядных двійкових слів (звичайно 4-, 8-, 16-розрядних). Частина регістрів перебуває усередині ЦПЭ (мікропроцесора), частина входить у пристрої уведення - висновку, інші - це осередку ЗУ. Кожен регістр або осередок ЗУ має свою унікальну адресу (двійкове слово). Коли мікропроцесору необхідно записати або вважати дані з якого-небудь регістра, МП спочатку виставляє на шину адреси адреса даного регістра, тим самим «активізуючи» його. Далі на шину даних виставляється слово даних й у регістр подається керуючий сигнал «запис» або «читання». Дані відповідно передаються із МП у регістр або назад. У цей час всі інші регістри й комірки пам'яті «пасивні» і не впливають на передачу даних по шині. Виконуючи команди програми, МП зчитує дані із двох регістрів, робить над ними в АЛУ деяку арифметичну або логічну операцію й записує результат у третій регістр або в один з перших двох. МП може переслати дані з одного регістра в інший, не змінюючи їх. При операціях з даними особливу роль грає регістр-акумулятор, що є одним із внутрішніх регістрів МП. З акумулятора зчитується один з операндов. Після виконання операції в ньому зберігається результат. Слід зазначити, що зчитувати дані з того самого регістра можна багаторазово. При цьому дані, що зберігаються в регістрі, не змінюються, поки на схему подане живляча напруга, у той час як при записі слова в регістр старе слово, що зберігалося в ньому, буде загублено. У регістрі будуть зберігатися нові дані.
До складу МШС входять ЗУ, що підрозділяються за принципом доступу до збереженої інформації на два класи: оперативні запам'ятовувальні пристрої (ОЗУ) і постійні запам'ятовувальні пристрої (ПЗУ). З осередками ОЗУ МП взаємодіє як зі звичайними регістрами, але при вимиканні харчування інформація в ОЗУ губиться. Дані із ПЗУ МП може тільки зчитувати. Це можуть бути команди програми або незмінної дані, наприклад константи й таблиці функцій. Дані в ПЗУ записуються за допомогою спеціального пристрою (программатора) у процесі виготовлення МШС. Для зберігання даних у ПЗУ на нього не потрібно подавати живлячих напруг. Завдяки цьому при включенні харчування МП відразу починає вибирати й виконувати команди програми із ПЗУ, звичайно починаючи з нульової адреси.
Використання МП у якості центрального керуючого пристрою дозволяє реалізувати цифровий контроль і керування фактично всіма функціями радіоприймача. Основна перевага мікропроцесорного керування - його більша гнучкість. При внесенні змін у приймач необхідно лише незначна зміна його схеми, тому що значно модифікуватися може лише програмне забезпечення МП. Часто можна обійтися взагалі без зміни апаратної частини. У РПУ за допомогою МП можна виконувати не тільки такі очевидні для застосування цифрових методів операції, як синтез частот або керування дисплеями, але й здійснювати вибір параметрів приймача, таких, як смуга пропущення фільтрів, коефіцієнт підсилення тракту ПЧ, постійна часу ланцюга АРУ й т.д.
Останнім часом одержали широке поширення однокристальні микроЭВМ (ОМЭВМ) — пристрою, що містять в одному кристалі всі основні елементи МШС: ЦПЭ, ОЗУ, ПЗУ, порти уведення —
вывода, таймери, тактовий генератор й інші допоміжні пристрої. Намітилася тенденція розробки пристроїв керування й контролю приймача у вигляді єдиний замовлений або напівзамовлений БІС ОМЭВМ. Такі блоки керування (БУ) і контролю вже застосовуються в дешевих віщальних приймачах.
Від ОМЭВМ не потрібно великої обчислювальної потужності, як від мікропроцесорів універсальних комп'ютерів. ОМЭВМ мають, як правило, спрощену систему команд. Однак її цілком достатньо для реалізації функцій по керуванню й контролю в РПУ. Застосування ОМЭВМ у РПУ є досить перспективним, тому що блоки керування на їхній основі виходять компактними, надійними, низкоэнергоемкими й дешевими.
Блок керування РПУ на ОМЭВМ.Якприклад розглянемо структурну схему БУ професійного приймача на основі ОМЭВМ КМ1816ВЕ48, показану на мал. 8.28. Даний БУ виконує наступні функції: керування ФСС і фільтрами вхідного ланцюга приймача, керування ДПКД у синтезаторі частот, тобто настроювання РПУ на задану частоту, індикацію дійсної частоти (читання даних з лічильників цифрового частотоміра), запам'ятовування ряду частот (каналів) з наступним швидким настроюванням на кожну з їх, квазиплавная перебудова по частоті.
Однокристальная микроЭВМ КМ1816ВЕ48 має у своєму складі тактовий генератор, частота коливань котфого стабілізована зовнішнім кварцовим резонатором; АЛУ, що оперує 8-розрядними двійковими словами (байтами); 65 регістрів загального призначення (ΡΟΗ), які також називають сверхоперативным ЗУ (СОЗУ); 1 Кбайт пам'яті програм; двунаправленный порт уведення — висновку (порт BUS); два квазидвунаправленных порти уведення — висновку (порти 1, 2); програмувальний 8-розрядний таймер-лічильник; інші допоміжні пристрої.
У кожному циклі звертання до зовнішньої пам'яті або регістрів ОМЭВМ спочатку видає адреса пристрою в порт BUS. Ця адреса зберігається в многорежимном буферному регістрі адреси, виходи якого утворять шину адреси. Далі в порт BUS видаються або приймаються дані. Двунаправленный буфер шини забезпечує необхідну навантажувальну здатність шини даних, дозволяючи тим самим підключати до шини кілька зовнішніх пристроїв. Не показана на мал. 8.28 шина керування утворена провідниками, що передають сигнали запису, читання даних із зовнішніх пристроїв, читання даних із зовнішньої пам'яті програм й ін. Шини адреси, даних і керування утворять у сукупності так називану системну шину МШС. На додаток до внутрішніх ΡΟΗ ОМЭВМ до системної шини підключене ОЗУ, що може бути реалізоване на БІСА серій 537, 541 і т.п. Позначене на мал. 8.28 пунктиром ПЗУ (можуть використатися БІС серій 573, 556 і т.п.) застосовується в тому випадку, коли ємності внутрішнього ПЗУ ОМЭВМ (1 Кбайт) виявляється недостатньо.
Особый інтерес представляє використання в мікропроцесорному БУ програмувальних интерфейсных БІС (інтерфейс - сукупність апаратно-програмних засобів, що забезпечують взаємодію МП або МШС із зовнішніми пристроями), які беруть на себе частина функцій керування апаратурами МШС, розвантажуючи центральний мікропроцесор. Режим роботи таких БІС можна змінювати програмно, записуючи в їхні внутрішні регістри певні двійкові слова. У схемі мал. 8.28 однієї із програмувальних БІСА є Біс-контролер клавіатури й дисплея ККД (КР580ВВ79), що звільняє ОМЭВМ від функцій сканування клавіатури й здійснення динамічної індикації на дисплеї, усуває вплив «дребезга» контактів клавіатури. Разом з допоміжними мікросхемами (дешифратори, буферні елементи) БІС може управляти індикатором із числом розрядів до 32 і клавіатурою із числом клавіш до 66. Цього звичайно буває досить у БУ приймача. Записуючи відповідні слова в регістр керуючого слова, можна задавати різні режими роботи контролера. Наприклад, при наборі із клавіатури значення частоти настроювання приймача набирають цифры, що, можуть высвечиваться на індикаторі або ліворуч праворуч, або в режимі калькулятора, тобто остання набрана цифра высвечивается в крайньому правому розряді індикатора, а попередні набрані цифри зрушуються на один розряд уліво.
Для керування перемиканням фільтрів основної селекції (ФОС) і фільтрів вхідного ланцюга (ОЦ) приймача в схемі мал. 8.28 використані порти 1 й 2 ОМЭВМ. Кожен розряд цих портів підключений до буферного елемента (на схемі не показані), що представляє собою транзисторний ключ у дискретному або інтегральному виконанні. Вихід кожного буферного елемента навантажений на свій виконавчий пристрій. Припустимо, що ОМЭВМ записала в порт 2 двійкове число з одиницею в молодшому розряді (00000001).
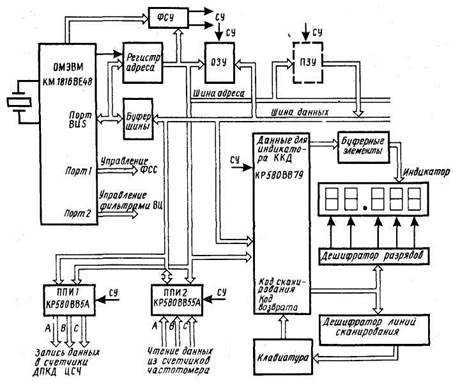
Малюнок 8.28
При цьому на висновках всіх розрядів порту, крім молодшого, з'явиться напруга логічного нуля ( + 0,45 У), а на висновку молодшого розряду - напруга логічної одиниці (+2,4 У). Ця напруга викличе включення транзисторного ключа, підключеного до висновку молодшого розряду порту, що, у свою чергу, викличе включення виконавчого пристрою на виході даного джерело^-реле або транзисторного Вч-ключа, що комутирує даний фільтр. Аналогічним образом можна управляти комутацією будь-яких ланцюгів у приймачі.
Портів ОМЭВМ виявляється недостатньо для керування й контролю всіх необхідних вузлів приймача, тому в схемі (див. мал. 8.28) застосовані два додаткових БІСИ програмувального паралельного інтерфейсу (ППИ) — КР580ВВ55А, що дозволяє ОМЭВМ використати шість додаткових 8-розрядних портів уведення — висновку. Порти ППИ1 на схемі мал. 8.28 використаються для керування дільником зі змінним коефіцієнтом розподілу (ДПКД) цифрового синтезатора частот (ЦСЧ) приймача, а порти ППИ2 — для прийому даних від лічильників блоку частотоміра РПУ. Відповідно перша БІС програмується на висновок даних через всі три своїх порти (А, В, З), а друга — на уведення даних.
Основним завданням при розробці мікропроцесорного блоку керування РПУ, як і будь-який МШС, є оптимальний розподіл функцій БУ між його апаратною й програмною частинами. Звичайно прагнуть зменшити обсяг апаратур, підвищуючи тим самим надійність і компактність БУ, знижуючи його енергоспоживання, застосовуючи програмувальні Бісів-контролери й реалізуючи частину функцій програмно. Однак це часто входить у суперечність із обмеженою швидкодією мікропроцесора й невеликим числом пристроїв уведення - висновку, що входять до складу МП або ОМЭВМ.
Апаратна частина й програмне забезпечення БУ приймача існують у вигляді єдиного апаратно-програмного комплексу, тому ефективність застосування МП у БУ багато в чому визначається якістю керуючої програми останнього. Незважаючи на звичайно невеликий обсяг цієї програми, у ній
можна виділити кілька блоків команд, що розрізняються за своїми функціями.
Після включення харчування починається виконання команд першого блоку - блоку ініціалізації. Тут програмуються всі интерфейсные БІС, листуються із ПЗУ в ОЗУ деякі константи, всі що комутирують БУ ланцюга приймача перемикаються у вихідний стан, виконуються інші операції.
Далі керування передається на блок команд, називаний інтерфейсом з користувачем. При цьому на дисплей видається запрошення до уведення даних, очікується натискання на клавіатурі будь-якої клавіші. Після натискання клавіші визначається її код, що потім зберігається в ОЗУ. На дисплей виводяться набирають цифры, що, наприклад значення частоти настроювання РПУ. Невірно набрані цифри віддаляються з дисплея й з ОЗУ при натисканні спеціальної клавіші.
Після натискання клавіші «Уведення» керування передається блоку обчислень. У цьому блоці перевіряється коректність набраного числа ( чиможливе настроювання приймача на дану частоту), визначається поддиапазон, у який попадає дана частота, визначаються коефіцієнти розподілу ДПКД у синтезаторі частот, підготовляються дані для завдання режимів роботи інших блоків і вузлів РПУ.
Далі починається виконання блоку команд керування апаратурами приймача, де підготовлені дані виводяться в порти, включаючи вузли РПУ для роботи в заданих режимах. Після цього керування може бути передане знову на блок команд інтерфейсу з користувачем.
Звичайно керуючі програми для невеликих МШС, до числа яких належать і блоки керування РПУ, розробляються й налагоджують на універсальних ЕОМ, наприклад на персональних комп'ютерах. Для цих цілей розроблені численні програмні пакети, що включають у себе програми-асемблери, компоновщики, отладчики, емулятори апаратур й ін. На заключному етапі налагодження керуючої програми виробляється на макеті блоку керування, у тому числі й у покроковому режимі із зупинкою після виконання кожної команди. При цьому у внутрішньому ПЗУ ОМЭВМ перебуває програма-монітор, що дозволяє після виконання кожної команди виводити на дисплей уміст будь-якого регістра блоку керування й змінювати цей уміст із клавіатури, а отлаживаемая програма розміщається в зовнішньому ПЗУ або ОЗУ.
Для ілюстрації можливостей мікропроцесорів і процесу їхньої взаємодії із зовнішніми пристроями, якимись є вузли й блоки приймача, розглянемо кілька прикладів застосування МП у РПУ, орієнтуючись, де можливо, на структурну схему мал. 8.28.
Малюнок 8.29
Синтезатори частот з мікропроцесорним керуванням. В. цифрових синтезаторах частот (ЦСЧ) по заданій програмі або по командах
Малюнок 8.30
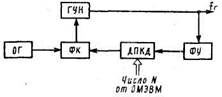
керування МП перебудовує ЦСЧ на необхідну частоту. Принцип керування ЦСЧ за допомогою МП полягає в тім, що в ланцюг ФАПЧ включається цифровий дільник частоти, коефіцієнт розподілу якого міняється під дією керуючих сигналів, що надходять від МП.
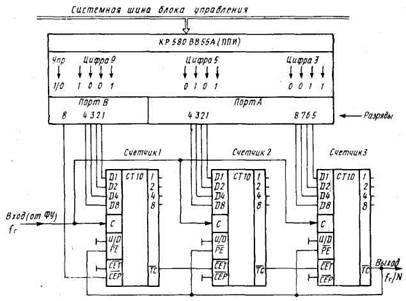
Розглянемо конкретний приклад реалізації цифрового ДПКД (мал. 8.30) ЦСЧ із мікропроцесорним керуванням за схемою мал. 8.29, де ППИ — це ППИ1 на схемі мал. 8.28.
У цьому випадку ДПКД побудований на основі трьох універсальних десяткових лічильників ДО531ИЕ16 з можливістю предустановки, з якими МП або ОМЭВМ (див. мал. 8.28) взаємодіє через порти А и В БІС ППИ (порт С у розглянутій схемі не використається). Кожен лічильник має чотири входи предустановки (D1, D2, D4, D8), чотири інформаційних виходи (1, 2, 4, 8), на яких є присутнім 4-розрядне двійкове число, що відповідає поточному стану лічильника (від 0 до 9), рахунковий вхід З, вхід U/D, що визначає режим роботи лічильника (додавання або вирахування), що управляє вхід предустановки РЕ, вхід переносу від лічильника попереднього розряду СЕТ, що управляє вхід дозволу рахунку СІРИЙ і вихід переносу ТС. Розглянемо процес перебудови ДПКД на новий коефіцієнт розподілу. Припустимо, що ДПКД необхідно настроїти на коефіцієнт розподілу, рівний 359. Спочатку ОМЭВМ записує у восьмий (старший) розряд порту В ППИ логічну одиницю, що, надходячи на вхід СІРИЙ молодшого лічильника 1, забороняє рахунок у цьому лічильнику й роботу ДПКД у цілому (див. нижче). Після цього ОМЭВМ записує в порт А и в молодші чотири розряди порту В десяткові цифри коефіцієнта розподілу у двійковому поданні — 3 (0011), 5 (0101), 9 (1001), які далі будуть постійно присутні на виходах цих портів, а отже, і на входах предустановки лічильників. Далі ОМЭВМ, не змінюючи вмісту інших розрядів, записує у восьмий розряд порту В логічний нуль, дозволяючи тим самим рахунок у лічильнику 1 і роботу всього ДПКД, що почне виконувати цикли розподілу. Розглянемо цей цикл.
Імпульсна послідовність, частота повторень якої дорівнює частоті коливань керованого генератора, що входить у кільце ФАПЧ ЦСЧ, з виходу формуючого пристрою (ФУ) надходить одночасно на рахункові входи Із всіх лічильників. Однак змінити свій стан під дією імпульсу на рахунковому вході лічильник може тільки тоді, коли на його вході СЕТ присутній у цей час активний сигнал переносу (логічний нуль). Тому після предустановки, виконаної ОМЭВМ, рахунок починає тільки молодший лічильник 1, вхід СЕТ якого заземлений, що еквівалентно подачі на нього постійно логічного нуля.
Всі лічильники ДПКД настроєні на режим рахунку, що віднімає, тому що їхні входи U/D заземлені (логічний нуль). Із приходом кожного рахункового імпульсу лічильник 1 зменшує свій стан на 1(9—8—7—6—...). Після приходу дев'ятого імпульсу лічильник 1 переходить у стан 0 і на його виході ТС з'являється сигнал переносу, що дозволяє перемикання лічильника 2 із приходом чергового імпульсу вхідної послідовності. Цей імпульс перемикає лічильник 2 у стан 4, тому що він мав вихідний стан 5, а лічильник 1 — у стан 9. При цьому сигнал переносу з виходу лічильника 1 знімається й лічильник 2 на наступні дев'ять
імпульсів вхідної послідовності не реагує. Коли рахунок
чик 1 знову перейде в стан 0, лічильник 2 перемкнеться ще раз
і перейде в стан 3 і т.д. Аналогічним образом лічильник управляє перемиканнями лічильника 3.
Такім образом, за час циклу розподілу лічильник 1 перемкнеться 359 разів, лічильник 2 — 35 разів, а лічильник 3 — тільки 3 рази. Після приходу 359-го імпульсу вхідної послідовності лічильник 3 перейде в стан 0 і на його виході ТС з'явиться сигнал переносу, що використається як вихідний сигнал ДПКД. Цей же сигнал подається на входи дозволу предустановки РЕ всіх лічильників, тобто після приходу 359-го вхідного імпульсу дозволяється перезапис даних (числа 359) з портів А и В ППИ в лічильники, що відбувається момент приходу 360-го вхідного імпульсу. При цьому з виходу ТС лічильника 3 знімається сигнал переносу й починається новий цикл розподілу. Після надходження від ОМЭВМ через розряд 8 порту В ППИ1 сигналу дозволу рахунку коефіцієнт розподіли буде записаний у лічильники ДПКД після найближчого переходу лічильника 3 у нульовий стан. Тому що перед першим циклом розподілу на новий коефіцієнт стан лічильників не визначено, перший цикл розподілу може бути длиннее або коротше заданого, тобто в ДПКД при перебудові на новий коефіцієнт розподілу має місце перехідний процес, тривалість якого в найгіршому разі дорівнює тривалості 1000 (по числу можливих станів трьох послідовно включених десяткових лічильників) періодів вхідної імпульсної послідовності.
Поява імпульсу на виході ДПКД після кожних 359 імпульсів на вході еквівалентно розподілу частоти повторення вхідної імпульсної послідовності на 359.
Однокристальна микроэвм може настроїти ДПКД за схемою мал. 8.44 на будь-який коефіцієнт розподілу від 1 до 999. Застосування в ДПКД аналогічних двійкових лічильників (16 можливих станів) замість десяткових дозволяє підвищити верхній коефіцієнт розподілу при трьох лічильниках до 4095.
За описаною схемою можна з'єднати послідовно більше число лічильників, одержуючи більші коефіцієнти розподілу. При цьому для зв'язку додаткових лічильників з ОМЭВМ можна задіяти невикористовуваний порт ІЗ ППИ або ввести в блок керування додаткову интерфейсную БІС. Виходи лічильників 1, 2, 4, 8 у розглянутій схемі не використаються.
Варто також пам'ятати про те, що максимально припустиме значення частоти повторення вхідної імпульсної послідовності визначається максимальною швидкодією першого (молодшого) лічильника. Наприклад, для універсальних лічильників серії ДО531 це значення становить порядку 40 Мгц.
Дільник зі змінним коефіцієнтом розподілу за схемою мал.8.29 входить у кільце ФАПЧ (див. мал. 8.30) ЦСЧ приймача. На мал.8.30 прийняті наступні позначення: ОГ - опорний генератор; ФК - фазовий компаратор; ГУН - генератор, керований напругою; ФУ - формуючий пристрій, що перетворить синусоїдальний сигнал з виходу ГУН у послідовність прямокутних імпульсів.
Застосування ОМЭВМ у приймачі дозволяє не тільки управляти частотою ЦСЧ, але й реалізувати пов'язані із цим «сервісні» функції: запам'ятовування частот кінцевого числа каналів, їх позивних, пошук по частоті з автоматичною зміною напрямку сканування при невиявленні до кінця діапазону сигналу нової радіостанції й т.д. Оператор, наприклад, може висвітити на дисплеї або завантажити на згадку будь-яку необхідну частоту настроювання. Для цього із клавіатури на передній панелі РПУ набираються необхідні цифри, після чого натискається відповідна клавіша. Наприклад, натисканням клавіші «Автоматичне сканування» може здійснюватися послідовне сканування по уведеним заздалегідь на згадку частотам. Сканування припиняється, якщо на одній із частот виявлена передавальна станція, і відновляється, якщо передача обривається. У тому випадку, коли необхідно спеціально виділити кілька каналів, їм може бути привласнений пріоритет. При скануванні на дисплеї послідовно высвечиваются номера каналів. При виявленні працюючого каналу його номер і частота по черзі з інтервалом в 1з высвечиваются на дисплеї. Якщо натиснуто, наприклад, клавіша «Вибір каналу», то сканування припиняється й на дисплеї поперемінно виникають номер каналу й відповідна йому частота. Послідовне натискання цієї клавіші приводить до перебору каналів. Таким чином, клавішею «Вибір каналу» може бути зафіксований будь-який канал для наступних операцій з ним. Може бути передбачена можливість виключення якого-небудь каналу зі сканування або запис його на згадку.
Взаємодія ОМЭВМ із блоком цифрового частотоміра. У процесі роботи приймача звичайно виникає необхідність вивести на індикатор БУ точне значення поточної частоти настроювання РПУ, тому що через несправність ГУН у кільці ФАПЧ синтезатора частот можливе відхилення значення щирої частоти настроювання приймача від значення, уведеного із клавіатури приймача. У зв'язку із цим у приймач із мікропроцесорним БУ часто включають блок цифрового частотоміра (див. § 8.8).
Розглянемо взаємодію ОМЭВМ БУ із блоком частотоміра на прикладі мал. 8.31. На швидкодіючі (з максимальною тактовою частотою 100 МГц) лічильники 1531ИЕ10 частотоміра покладена апаратна функція рахунку імпульсів вхідної послідовності. ОМЭВМ не може виконувати дану функцію через свого обмеженої швидкодії. Робота схеми частотоміра описана в § 8.8. У випадку застосування блоку частотоміра в приймачі з мікропроцесорним БУ друга половина періоду сигналу в крапці Б (див. мал. 8.26, б) використається для передачі значення вимірюваної частоти з лічильників в ОМЭВМ через БІСА ППИ (це ППИ2, мал. 8.28). У цей час схема И закрита й уміст лічильників не змінюється.
Формувач ФУС (див. мал. 8.26) видає імпульси предустановки (крапка Г), підготовляючи лічильники до чергових циклів рахунку, а також сигнал запиту переривання, аналогічний сигналу стробирования буферних регістрів (див. мал. 8.26, крапка Д), що подається на вхід INT ОМЭВМ. Цей сигнал формується в момент закінчення кожного циклу рахунку й інформує микро-эвм про те, що черговий цикл рахунку завершений і з лічильників необхідно вважати дані. На це приділяється 1 мс, тому що в момент початку чергового циклу рахунку дані, отримані в ході попереднього циклу, будуть загублені.
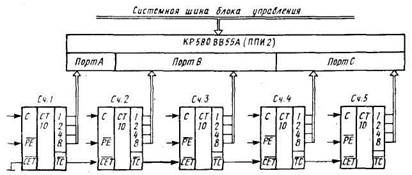
Малюнок 8.31
Одержавши сигнал запиту переривання, ОМЭВМ припиняє виконання команд основної програми й переходить до виконання підпрограми обслуговування переривання, що містить команди читання даних з лічильників через БІСА ППИ, збереження отриманих даних в ОЗУ або видачі їх на дисплей залежно від поточного режиму роботи блоку керування РПУ. Після закінчення обслуговування переривання микроэвм повертається в основну програму й продовжує її виконання до наступного запиту переривання.
Відзначимо, що переривання можуть бути заборонені або дозволені спеціальними командами ОМЭВМ.Якщо переривання заборонені, микроэвм ніяк не реагує на сигнал по входу INT. У програму включають команду заборони переривань у тому випадку, коли небажане переривання в ході виконання якоїсь групи команд. Після виконання цього місця в програмі переривання можуть бути знову дозволені. Після включення харчування переривання в ОМЭВМ заборонені, отже, у блоці команд ініціалізації (див. вище) може бути присутнім команда дозволу переривань.
Значення проміжної частоти (яке може мінятися залежно від поддиапазона) ураховується програмним способом. Зчитавши в підпрограмі обслуговування переривання число з лічильників, микроэвм відніме або додасть до нього константу - значення ПЧ. У результаті буде отримане значення частоти настроювання приймача, що далі може бути виведене на індикатор або збережене в ОЗУ.
МП у системі дистанційного керування й контролю РПУ.Керуючі команди передаються одному МП, що направляє сигнали керування до відповідних вузлів приймача. При цьому істотно спрощуються як органи керування на передній панелі приймача, так і з'єднання між його вузлами. Це порозумівається тим, що передача команд керування здійснюється не по численним проводам, а по системній шині. Звичайно крім МП, що перебуває в керованих апаратурах, передбачається ще один МП у пульті дистанційного керування й контролю. Це також дає можливість керування відразу декількома пристроями, що працюють спільно.
На мал. 8.32 показана типова схема системи дистанційного керування й контролю з використанням МП. З малюнка видно, що МШС блоку керування в приймачі й МШС пульта дистанційного керування й контролю можуть мати однакову структуру, за винятком того, що в МШС пульта ДУ відсутні пристрою уведення - висновку, безпосередньо взаємодіючі з вузлами приймача. До складу обох МШС входять контролери послідовного інтерфейсу, які можуть бути реалізовані, наприклад, на основі програмувальних БІСА універсальних асинхронний^-асинхронних-асинхронні-синхронно-асинхронних приемопередатчиков (УСАПП) КР580ВВ51, які перетворять двійкові слова, передані від МП по системній шині в паралельній формі, у послідовний потік біт і назад.
Адаптація послідовних двійкових потоків даних, що надходять від пульта ДУ до БУ приймача й назад, до передачі по 268 лінії зв'язку
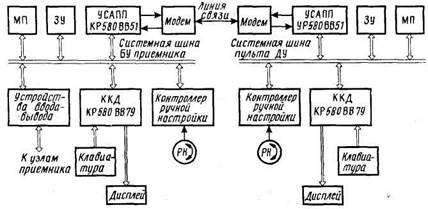
Малюнок 8.32
здійснюється в модемах (модуляторах-демодуляторах). У цих пристроях відбувається завадостійке кодування переданих даних, модуляція їхніх двійкових сигналів із застосуванням перспективних видів ЧМ і ФМ. У модемах здійснюється також завадостійкий прийом даних на тлі шумів у лінії зв'язку, їхнє декодування з виявленням й (або) виправленням помилок. Складність модему, що звичайно управляється своїм окремим мікропроцесором, залежить від виду лінії зв'язку (телефонна лінія зі смугою 0,3-3,4 кгц; коаксіальний кабель; волоконно-оптическая лінія), а також від її довжини. Іноді, якщо, наприклад, лінія зв'язку розташована в межах одного будинку, можна взагалі обійтися без модемів, передаючи команди ДУ безпосередньо у двійковій формі.
Застосування МП у БУ приймача й у пульті ДУ дозволяє системі дистанційного керування й контролю адаптуватися до якості лінії зв'язку й реалізувати ефективні протоколи обміну даними, наприклад, з перезапитом і повторною передачею команди ДУ при виявленні помилок.
Керування приймачем з пульта ДУ практично нічим не відрізняється від керування з передньої панелі РПУ, тому що на передню панель пульта винесені ті ж органи керування й контролю, що й на передню панель приймача - ручка настроювання (РН), клавіатура для набору значень частоти настроювання й уведення інших команд, багатофункціональний дисплей. Разом з тим можливе завдання режимів пріоритетного керування з пульта ДУ або з передньої панелі приймача. Якщо керування з пульта ДУ має більше високий пріоритет, то при надходженні команди із цього пульта БІС УСАПП БУ приймача видасть сигнал запиту переривання, одержавши який МП БУ негайно вважає з БІС УСАПП прийняту команду й почне її виконання. При цьому виконання команд, уведених з передньої панелі приймача, тимчасово припиняється. Якщо більше високий пріоритет має керування з передньої панелі РПУ, то переривання від БІС УСАПП забороняються (див. вище).
Останнім часом для дистанційного керування багатьма РПУ на більших прийомних центрах стали застосовуватися універсальні ЕОМ, персональні комп'ютери, що мають більшу обчислювальну потужність і широкий набір периферійного встаткування: високоінформативні телевізійні дисплеї, друкувальні пристрої, накопичувачі на магнітних дисках великої ємності й т.д. Завдяки цьому стала можливої реалізація складних алгоритмів керування РПУ, адаптивний прийом й ін. Швидкість передачі команд ДУ при використанні сучасних модемів досягає десятків тисяч біт/с.
Висновки. 1. Введення МП у РПУ дозволяє визначити параметри стану й змінити режим роботи конкретного вузла, а також здійснити комутацію блоків по програмі МП.
2. Перспективним є застосування в РПУ однокристальних микроэвм, а також програмувальних интерфейсных БІС, що дозволяє зробити блок керування надійним, компактним, з малим енергоспоживанням.
3. Для ефективного застосування МП необхідно правильно розподілити функції між апаратною частиною й програмним забезпеченням блоку керування РПУ.
4. Використання МП у якості центрального керуючого пристрою дозволяє реалізувати цифровий контроль і керування фактично всіма функціями приймача: синтезом частот; «сервісними» функціями по запам'ятовуванню частот конкретних каналів й їх позивних, включаючи пошук по частоті; перемиканням аналогових і побудовою цифрових фільтрів; дистанційним керуванням РПУ; сигнатурним аналізом і т.д.
9. ЗАВАДОСТІЙКІСТЬ РАДІОПРИЙМАЛЬНИХ ПРИСТРОЇВ
9.1 Перешкоди радиоприему
Перешкодою називається будь-який сторонній вплив на РПУ, що не ставиться до корисного сигналу й перешкоджаюче його правильному прийому. Перешкоди реального каналу зв'язку можна розділити на зовнішні й внутрішні. Зовнішні перешкоди можна підрозділити на природні й штучні. Природні перешкоди створюються електромагнітними процесами в земній атмосфері. Потужним джерелом перешкод є космос і тропосфера. Штучні перешкоди можуть створюватися численними промисловими установками (індустріальні перешкоди), а також у результаті випромінювань сторонніх радіостанцій (ненавмисні й спеціально організовані перешкоди) і т.д. Внутрішні перешкоди в основному обумовлені внутрішніми шумами радіоприймача.
Дата добавления: 2016-03-27; просмотров: 1108;