5 страница. частотні складові, яким не було в спектрі вхідного сигналу, ЧД не можна реалізувати за допомогою лінійного ланцюга з постійними параметрами
Малюнок 7.8
частотні складові, яким не було в спектрі вхідного сигналу, ЧД не можна реалізувати за допомогою лінійного ланцюга з постійними параметрами, тому що на її виході не можуть виникати нові частотні складові. ЧД не можна створити й за допомогою безінерційного нелінійного ланцюга. Дійсно, якщо в якості безінерційного ланцюга використають діод, то при дії на його вході ЧМ-
коливання імпульси струму діода містять постійну складову, рівень якої залежить тільки від амплітуди цього коливання, але не від його фази й частоти.
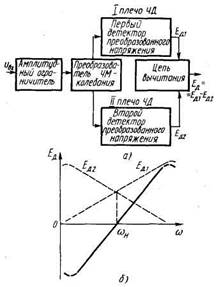
Частотне детектування здійснюється в пристроях, що з'єднують у собі лінійні й безінерційні нелінійні системи. Принцип частотного детектування складається в перетворенні ЧМ- коливання в лінійній системі в коливання з іншим видом модуляції з наступним детектуванням перетвореного коливання без інерційним нелінійним ланцюгом. Загальна структурна схема ЧД показана на мал. 7.8, а, амплітудний обмежник служить для усунення паразитної амплітудної модуляції ЧМ- коливань.
Малюнок 7.9
На мал. 7.8, б дана характеристика детектування однотактного ЧД Ед=F(ωвх), що не заходить в область негативних значень Ед. Перетворити ЧМ- коливання можна в наступні види коливань: 1) в амплітудно- частотні- модульоване (АЧМ) коливання, у якого амплітуда міняється відповідно до зміни частоти коливання.
Це перетворення можна здійснити в лінійному ланцюзі з реактивними параметрами, що залежать від частоти. Після лінійного ланцюга АЧМ- коливання детектується АД; 2) у фазочастотне коливання з наступним фазовим детектуванням; 3) в імпульси зі змінною шпаруватістю з наступним детектуванням імпульсним детектором, напруга на виході якого пропорційно тривалості імпульсів, і т.д.
Структурна схема балансового ЧД показана на мал. 7.9, а, а його характеристика детектування — на мал. 7.9, б. Пристрій має два детектори перетвореної напруги й ланцюг вирахування. Переваги такого ЧД у порівнянні з не балансовим наступні: 1) характеристика детектування більше лінійна, оскільки парні гармоніки в балансовому ланцюзі компенсуються; 2) характеристика детектування проходить через нуль, тому напруга Едвідповідає знаку відхилення звукової частоти ωвхвід несучого значення ωн. Це дає можливість використати балансові ЧД у ланцюгах автоматичного підстроювання частоти (АПЧ).
Висновки. 1. Частотне детектування звичайно здійснюється в пристроях, що з'єднують у собі лінійні й безінерційні нелінійні ланцюги. У ЧД ЧМ- коливання перетвориться в лінійному ланцюзі з реактивними параметрами в коливання з іншим видом модуляції з наступним відповідної детектуванням перетвореного коливання.
2. Частотні детектори бувають однотактними й балансовими. Балансові ЧД мають більше близьку до лінійного характеристику детектування; знак напруги Ед стежить за знаком зміни частоти сигналу.
7.3 Види частотних детекторів
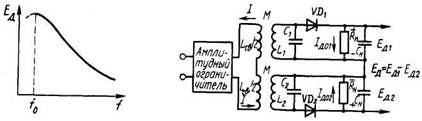
Частотний детектор з перетворенням відхилення частоти в зміну амплітуди. У таких детекторах ЧМ- коливання перетвориться в АЧМ- коливання в розстроєних щодо несучої частоти резонансних ланцюгах з наступним детектуванням амплітудним детектором.
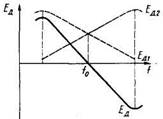
Балансовий ЧД із взаємно- розлагодженими контурами. Такий ЧД являє собою два ЧД із одиночними контурами (мал. 7.11); L1C1-контур першого ЧД налаштований на частоту f01 перевищуючу f0 на δf, а L2C2-контур — на частоту f02, що на δf нижче середньої частоти вхідного сигналу f0. При f = f0, Uк1= Uк2, Eд1 = Eд2 і напруга на виході ЧД
Малюнок 7.10 Малюнок 7.11
(мал. 7.20, а) Ед=0. При f > f0 напруга Uк1на першому контурі стає більше, ніж напруга Uк2 на другому контурі, івідповідно Eд1>Eд2; Eд>0. При f < f0, Uк1< Uк2, Ед1 < Ед2напруга Ед<0 (мал. 7.20, а).
Висновки. 1. Характеристика детектування балансового ЧД із взаємно- розлагодженими контурами практично симетрична, тому при детектуванні відсутні перекручування по другій гармоніці.
2. При сильної взаємної разлагодженості контурів характеристика детектування стає нелінійною (мал. 7.20, б).
Частотний детектор з перетворенням зміни частоти в зміну фазового зрушення.
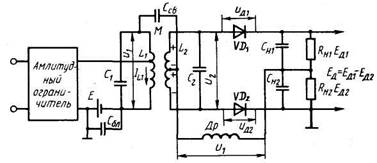
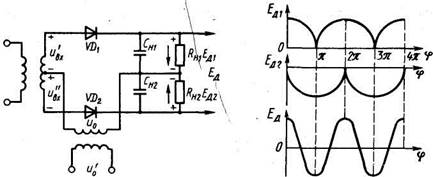
Частотний детектор зі зв'язаними контурами. Схема такого ЧД показана на мал. 7.12. Звичайно плечі ЧД виконують однаковими, тому Rн1 = Rн2 = Rн; Сн1 = Сн2 = Сн. Для перетворення ЧМ- коливань використають лінійний ланцюг із двох індуктивно зв'язаних контурів L1C1й L2C2. Контури настроєні на частоту f01=f02=f0, рівну середній частоті сигналу. На виході лінійного ланцюга включені два діодних детектори, на навантаженнях яких виділяють продетектування напруги Ед1й Ед2. Тому що діоди VD1, VD2 однакові, a Rн1 = Rн2, то коефіцієнти передачі діодних детекторів рівні cos θ. Тоді Eд1 = Uд1cos θ, Εд2 = Uд2cos θ, де Uд1, Uд2 — високочастотні напруги на діодах. Постійна складова струму діода VD1 протікає по ланцюзі VD1→Rн1→Др→верхня половина L2→VD1, а постійна складова струму VD2 — по ланцюзі VD2→Rн2→Др→ нижня половина L2→VD2. Високочастотний дросель Др служить для замикання ланцюга постійної складового струму діода. Спеціального пристрою, що віднімає, у ЧД ні, а використається просте додавання напруг Eд1 й Ед2 у протилежній полярності, отже,
 (7.1)
(7.1)
Малюнок 7.12
Згідно (7.1), для визначення Еднеобхідно знайти напруги Uд1 й Uд2. Для цього вкажемо ланцюг протікання високочастотної складового струму діода VD1: VD1→Cн1→Cн2→ загальне проведення →Сбл→L1С1-контур →Ссв→L2С2-контур → VD1. До діода VD1 приклали дві напруги: половина напруги на другому контурі 0,5U2і напруга на першому контурі U1, тобто Uд1 = U1 + 0,5U2. Напруга U1 виділяється на дроселі Др, підключеному по високій частоті паралельно L1С1-контуру; наявність напруги U1 необхідно для нормальної роботи ЧД. Дросель підключений паралельно першому контуру. Для того щоб індуктивність Lдрне впливала на індуктивність першого контуру, неї вибирають виходячи з умови Lдр≈10L1. За аналогією, для діода VD2 можна записати Uд2=U1-0,5U2; знак мінус обумовлений тим, що якщо до діода VD1 прикладається плюс напруги й2, то в цей же момент часу до діода VD2 прикладається мінус напруги й2.
Малюнок 7.13
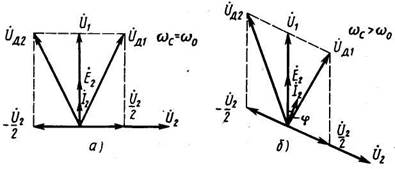
Принцип роботи ЧД зі зв'язаними контурами пояснимо за допомогою векторних діаграм мал. 7.13. Припустимо, що fc=f0 (середня частота сигналу збігається із частотою настроювання контуру). У якості вихідного беремо вектор напруги U1, його фазу приймаємо рівної нулю (мал. 7.13, а), ЭДС, що наводить у другому контурі, E2=jωMiL1=jωMU1/(r1+jωL1)≈(М/L1) U1. Відповідно до вираження для Е2 фаза ЭДС збігається з фазою U1. Струм у другому контурі, викликуваний ЭДС Е2, I2 = E2 /[ r2+j(ωL2 – 1/ωЗ2)]; при резонансі Ϊ2=E2/r2, тобто фаза струму в другому контурі при ωс=ω0збігається з фазою Е2. Таким чином, вектори U1, Е2 й I2 при ωс=ω0 збігаються по фазі (див. мал. 7.13, а). Визначимо напругу на другому контурі: U2=I2. Це напруга на конденсаторі З2 відстає від струму I2 на 90°. Половина напруги U2, що діє щодо середньої крапки котушки індуктивності L2, що прикладає до діода VD2, випереджає напругу U1 на 90°; інша, що прикладає до діода VD1, відстає від цієї напруги на 90°, тобто збігається з U2. Склавши вектори U1 й 0,5U2, знайдемо вектор напруги Uд1, а вектори U1 й -0,5U2— вектор Uд2. З векторних діаграм мал. 7.13, а видно, що Uд1= Uд2; отже, Εд1 = Εд2, Εд = 0.
Побудуємо векторну діаграму для fс>f0 (мал. 7.13, б). У якості вихідного беремо вектор U1;тому що ЭДС Е2≈(М/L1)U1, те її фаза збігається з фазою U1. Струм у другому контурі при ωс> ω0 опір
ωL2 – (1/ωЗ2)для струму I2 має індуктивнийхарактер, отже, струм I2 при ωc>ω0 відстає по фазі від ЭДС Е2.
Малюнок 7.14
Напруга U2 на конденсаторі З2 відстає від струму I2 на 90°. До діода VD\ прикладена напруга 0,5U2, що відстає від струму I2на 90°, а до діода VD2 — напруга — 0,5U2, що випереджає струм I2 на 90°. Склавши відповідні вектори, визначимо Uд1й Uд2. З діаграми мал. 7.13, б при ωс>ω0 треба, що Uд1>Uд2;при цьому Ед2>Ед1й Ед<0. Форма характеристики детектування ЧД показана на мал. 7.14; вона залежить від добротності контурів і ступеня зв'язку між ними.
Висновки. 1. До кожного з діодів ЧД зі зв'язаними контурами прикладене напруга, що складається з половини напруги на другому контурі й напруги на першому контурі. Напруга на діоді VD1: Uд1 = U1 + 0,5U2, напруга на діоді VD2. Uд2 = U1-0,5U2.
2. Зі зміною частоти fс відносно f0 міняється фазове зрушення між ЭДС Е2, що наводить у другому контурі, і струмом I2 у другому контурі, що приводить до зміни напруг Uд1 й Uд2 на діодах, а отже, напруги ЕД.
7.4 Призначення, структурна схема фазових детекторів
Фазовим детектором (ФД)називається пристрій, що служить для створення напруги, що змінюється відповідно до закону змінифази вхідноїнапруги. Якщо на вході ФД діє напруга ивх= Uвхcos[ωt+ φ(t)],те продетектована напруга Εд = ΚФД φ(t). Покладемо, на вході ФД діє напруга ивх, показане на мал. 7.15, а, тоді напруга на виході ФД повинне мати вигляд мал. 7.15, б. Розглянутий випадок є типовим для фазового телеграфування, при якому початкові фази паузи й посилки відрізняються на 180°. При фазовій модуляції (ФМ) фаза плавно змінюється відповідно до переданої інформації. Тому що в спектрі напруги на виході ФД є частотні складові, яким не було в спектрі напруги ивх, те для реалізації ФД не можна використати лінійну систему з постійними параметрами. Фазове детектування не можна також здійснити
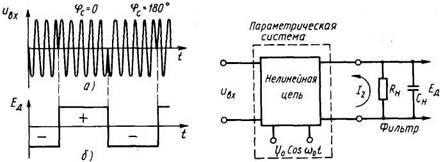
Малюнок 7.15 Малюнок 7.16
за допомогою простий безінерційної нелінійної системи. Наприклад, постійна складова струму діодного детектора залежить тільки від амплітуди вхідної напруги й не залежить від його фази й частоти. Тому ФД можна виконати на основі лінійної системи зі змінними параметрами (параметричної системи).
Структурна схема ФД показана на мал. 7.16. Ця схема збігається з- структурною схемою перетворювача частоти; відмінність складається лише в тім, що частота гетеродина (опорна напруга) ωг= ωс = ω0. Під дією опорної напруги й0міняється активний параметр схеми, звичайно крутість S.
Схема ФД збігається також зі схемою параметричне АД (див. мал. 6.3), тому продетектована напруга на виході ФД, згідно (6.2),
 (7.3)
(7.3)
де S1 — амплітуда першої гармоніки крутості струму перетворювального елемента; φ = φ0 — φс. Залежно від виду нелінійного ланцюга й способу її включення розрізняють однотактні, балансові й кільцеві ФД. Як нелінійний елемент використають діоди й транзистори.
Висновок. Фазове детектування здійснюється за допомогою параметричного ланцюга, у якій джерело опорної напруги повинен бути синхронним із джерелом сигналу.
7.5 Види фазових детекторів
Балансовий ФД. Такий ФД являє собою два діодних
однотактних ФД (мал. 7.17), кожний з яких працює на своє
навантаження. У результаті цього на виході кожного плеча ФД створюється
напруга Ед1й Ед2 зустрічної полярності, тому Ед=Ед1-ед2.
Вхідна напруга підвозиться до діодів у протилежній полярності, тому фаза напруги ивхвідрізняється від фази й"вх на
180°. Опорна напруга Прикладається до діодів в однаковій
фазі, тому

Малюнок 7.17 Малюнок 7.18

Отже, Eд=Eд1-Eд2»Kд(Uвх+U'вх)cos φ=2KдUвхcos φ. Характеристики детектування плечей і всього ФД при U0≈Uвхпоказані на мал. 7.18.
У кільцевому ФД використаються два балансових фазових детектори, при цьому симетричність характеристики детектування поліпшується, а коефіцієнт передачі детектора зростає.
Висновки. 1. Балансовий ФД — це сполучення двох однотактних ФД, кожний з яких працює на своє навантаження й створює на них взаємно протилежні напруги; різниця цих напруг визначає продетектовану напругу на виході балансового ΦД. Полярність вхідних сигналів на діодах назад, опорної напруги — однакова.
2. Характеристика детектування балансового ФД у порівнянні з однотактним більше симетрична й проходить через нуль. Симетричність цієї характеристики проявляється й при U0≈Uвх.
8. РЕГУЛЮВАННЯ В РАДІОПРИЙМАЧАХ
8.1 Призначення й види регулювань
У процесі виготовлення й експлуатації радіоприймача для одержання найкращої якості прийому доводиться регулювати ряд його показників: частоту настроювання, коефіцієнт підсилення, смугу пропущення й ін. Для здійснення цих регулювань у РПУ використають регулятори.Залежно від виду регульованого параметра розрізняють: регулювання посилення, що може здійснюватися в трактах радіочастоти й проміжної частоти, а також у післядетекторний частини приймача; регулювання частоти настроювання, що забезпечує прийом сигналів у широкому діапазоні частот; регулювання смуги пропущення, що може вироблятися в трактах радіочастоти й проміжної частоти, а також у післядетекторної частини приймача. Можливі регулювання й інші параметри приймача.
Регулювання буває ручний й автоматичної. Ручне регулювання служить для установки вихідних показників РПУ. Автоматичне регулювання підтримує обрані показники РПУ на необхідному рівні. Деякі види регулювань можна віднести до змішаного. У сучасних РПУ для регулювань, керування й контролю широко використають мікропроцесори. У деяких приймачах передбачається дистанційне керування.
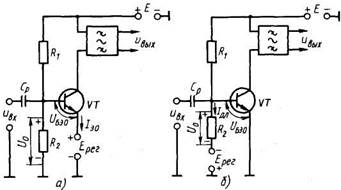
8.2 Регулювання посилення
Способи регулювання посилення резонансного підсилювача.Резонансний коефіцієнт підсилення підсилювача за схемою мал. 3.2, а, згідно (3.26), K0=m1m2SRэкв(де т1, т2 — коефіцієнти включення; Rэкв — еквівалентний опір контуру при резонансі з обліком шунтуючої дії виходу транзистора й входу наступного каскаду; S — крутість транзистора в робочій крапці). Регулювання ДО0 може здійснюватися зміною будь-якої величини, що входить у формулу (3.26). При синтезі пристроїв регулювання потрібні істотна зміна ДО0 від напруги регулювання Ерег, малий струм регулювання, мала залежність зміни інших параметрів підсилювача при зміні ДО0. Розглянуті способи зміни посилення застосовні як для ручних, так і для автоматичних регулювань.
Малюнок 8.1
8.3 Автоматичне регулювання посилення
Малюнок 8.2
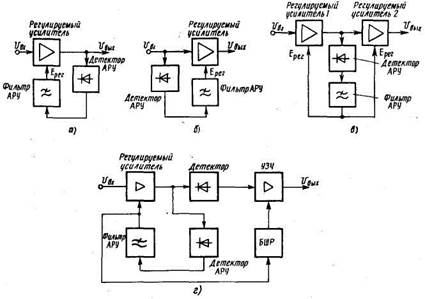
Принцип дії й види АРУ. Автоматичне регулювання посилення (АРУ) призначена для підтримки постійної напруги на виході УПЧ, необхідного для нормальної роботи вихідних пристроїв приймача. Рівень сигналу на вході приймача змінюється в широких межах; при максимальній напрузі на вході РПУ система АРУ повинна забезпечити мінімальний коефіцієнт підсилення радіо тракту приймача, і навпаки. Таким чином, завдання АРУ — змінювати посилення радіо тракту РПУ залежно від рівня вхідного сигналу. Система АРУ повинна мати пристрій, напруга Eрегна виході якого залежить від рівня сигналу в радіо тракті приймача. Таким пристроєм може служити, наприклад, амплітудний детектор. Напруга Ерег,подаване на підсилювальні каскади, змінює їхній коефіцієнт підсилення. Для АРУ в приймачі створюється ланцюг АРУ, щоскладається з детектора АРУ й фільтра. Залежно від способу подачі регульованої напруги АРУ підрозділяють на зворотні, прямі й комбіновані.
Структурна схема зворотної АРУ. У цій схемі (мал. 8.2, а) напруга регулювання Ерегодержують із напруги Uвыхна виході регульованого підсилювача, у якому можуть застосовуватися способи регулювання посилення, розглянуті в § 8.2. Напруга Ерегподається з боку виходу в напрямку входу підсилювача, що й обумовило назву цього виду АРУ. Детектор АРУ забезпечує напруга Ерегна його виході, пропорційне амплітуді напруги Uвых: Ерег=Кдет АРУUвых. Фільтр АРУ відфільтрованих складових частот модуляції й пропускає складові напруги, що повільно змінюються, ЕРЕГ. Ланцюг АРУ, що складається тільки з детектора й фільтра, називають простій. У ланцюг АРУ може включатися підсилювач до або після детектора. Підсилювач до детектора АРУ — це УПЧ, після детектора — УПТ. У високоякісних РПУ підсилювач іноді включають до й після детектора. При наявності в ланцюзі АРУ підсилювача АРУ називають посиленою.
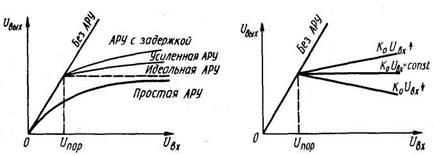
Робота регульованого підсилювача разом з ланцюгом АРУ описується характеристикою АРУ, що показує залежність Uвых = F(Uвх) (мал. 8.3). Якщо АРУ проста, то при збільшенні Uвх напруга Uвых =K0Uвхчерез зменшення за рахунок АРУ резонансного коефіцієнта підсилення ДО0 збільшиться в менше число раз, чим напруга Uвх. Зі збільшенням Uвыхзбільшується Ерегі відповідно зменшується K0. Недолік простій АРУ полягає в тому, що коефіцієнт підсилення радіо тракту приймача зменшується й при прийомі сигналів малого рівня, коли цього не потрібно. Для усунення цього недоліку використають АРУ із затримкою, у якій ланцюг АРУ починає діяти тільки в тому випадку, коли вхідна напруга Uвх перевищує граничне Uпор;при цьому слабкі сигнали ланцюгом АРУ не послабляються. При ідеальній роботі ланцюга АРУ із затримкою для Uвх > Uпор напруга на виході підсилювача постійно (пунктирна пряма на мал. 8.3). У міру збільшення коефіцієнта підсилення підсилювача в ланцюзі АРУ характеристика АРУ реального підсилювача все більшою мірою наближається до ідеального.
Малюнок 8.3 Малюнок 8.4
Особливістю зворотною АРУ є те, що вона не дозволяє одержати ідеальну характеристику АРУ; у цьому випадку можна лише наблизитися до неї. Зворотна АРУ не може бути ідеальної, оскільки для її роботи необхідне збільшення вихідної напруги ∆Uвых. Якщо допустити, що АРУ ідеальна, то ∆Uвых = 0, при цьому Ерег= const, K0 = const, регулювання відсутня, а отже, Uвых повинне зростати.
Структурна схема прямої АРУ (див. мал. 8.2, б). Ланцюг АРУ підключена до входу регульованого підсилювача, напруга регулювання Ерегвиходить у результаті детектування вхідної напруги. При збільшенні Uвх напруга на виході детектора АРУ зростає, при цьому збільшується Ерег,що викликає зменшення K0. Напруга Uвых =ДО0Uвх. Якщо Uвх збільшується, то ДО0 зменшується; при цьому їхній добуток може залишатися постійним. Пряма АРУ дозволяє одержати ідеальну характеристику регулювання (мал. 8.4), але практично домогтися цього не вдається. Такий АРУ властивий ряд недоліків, основний з яких складається в необхідності включати перед детектором у ланцюзі АРУ додатковий підсилювач із більшим коефіцієнтом підсилення. Якщо, наприклад, напруги Ерег= 0,1—1 У, Uвх ≈ 10—100 мкв, те підсилювач у ланцюзі АРУ повинен мати посилення ДО0 ≈ 10 ÷ 105, практично таке ж, як й в основному тракті приймача. Пряма АРУ нестабільна, тобто піддана дії різних дестабілізуючих факторів. Якщо, наприклад, через зміну температури або напруги джерела харчування коефіцієнт підсилення ДО0 регульованого підсилювача збільшиться, то характеристика АРУ з ідеальної перетворюється в характеристику з наростаючої Uвых (мал. 8.4).
Структурна схема комбінованої АРУ (див. мал. 8.2, в). У цьому випадку раціонально використаються переваги обох схем АРУ: стабільність зворотної АРУ й можливість одержання ідеальної характеристики в прямій АРУ. Для першого підсилювача це зворотна, а для другого — пряма АРУ. Основне регулювання відбувається в першому підсилювачі. Він, як правило, містить кілька регульованих каскадів. Другий регульований підсилювач звичайно однокаскадний, його основне завдання — трохи компенсувати зростаючу напругу на виході першого підсилювача. Те, що ідеальне регулювання не досягається на практиці, не має великого значення, тому що межі зміни Uвых невеликі.
Безшумна АРУ. Система АРУ забезпечує в приймачі максимальне посилення тоді, коли приймається слабкий сигнал. Це приводить до збільшення рівня шумової напруги на виході приймача. Це явище усуває безшумна АРУ (див. мал. 8.2, г), дляреалізації якої створюється спеціальний ланцюг БШР, керована Ерег. Якщо Ерегстає нижче певного рівня, то ланцюг БШР виробляє напруга Еэ, щозамикає В3Ч;при перевищенні Ерегцього граничного значення Еэ стає рівним нулю, УЗЧ відмикається й робота приймача відновлюється. Є ряд схемних реалізацій ланцюга БШР.
Висновки. 1. Для АРУ створюють ланцюг, що складається з детектора й фільтра. Детектор забезпечує напруга регулювання, пропорційна амплітуді сигналу в радіо тракті; фільтр придушує складові із частотами модуляції й пропускає складові, викликуваними завмираннями сигналу.
2. У зворотної АРУ напруга регулювання одержують із напруги на виході регульованого підсилювача. Для наближення характеристики АРУ до ідеального в ланцюг АРУ включають підсилювальні каскади. Ланцюг зворотної АРУ принципово не може забезпечити ідеальної характеристики.
3. У прямій АРУ напруга в ланцюг АРУ надходить із входу регульованого підсилювача. При прямій АРУ можливе одержання ідеальної характеристики, однак при цьому в ланцюзі АРУ необхідний підсилювач із більшим коефіцієнтом підсилення. Пряма АРУ відрізняється складністю й сильно піддана дії дестабілізуючих факторів.
4. У комбінованої АРУ раціонально використаються стабільність зворотної й можливість одержання ідеальної характеристики прямій АРУ.
5. У приймачах імпульсних сигналів детектор радіоімпульсів і піковий детектор необхідні як для АРУ, так і для обробки сигналу. Детектор радіоімпульсів звичайно ставлять об'єднаний. Ланцюг АРУ в імпульсному РПУ відкривають тільки на час дії корисних імпульсів. Система ПАРИ забезпечує зміну в часі посилення приймача так, що воно максимально при прийомі слабких і мінімально при
прийомі сильних імпульсів.
6. Через наявність у ланцюзі зворотній АРУ інерційних елементів при зміні вхідної напруги в системі АРУ виникає аперіодичний або коливальний перехідний процес, що може порушити нормальний прийом сигналу.
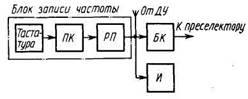
8.4 Настроювання діапазонних радіоприймачів
Малюнок 8.5
Автоматичне настроювання РПУ. Для РПУ характерна автоматизація процесів настроювання; при цьому передбачається можливість як місцевого, так і дистанційного керування. У багатьох приймачах реалізується програмне керування. Ланцюг автоматичного настроювання приймача на робочу частоту повинна забезпечити перемикання всіх необхідних елементів при переході з однієї частоти на іншу, а також підстроювання цих елементів при впливі дестабілізуючих факторів для забезпечення необхідної точності. Після набору потрібного значення частоти на клавіатурі подається спеціальний керуючий сигнал, що свідчить про початок настроювання. У процесі настроювання вибирається
Дата добавления: 2016-03-27; просмотров: 1626;