Понятие о приведенном механическом звене и одномассовой системе электропривода.
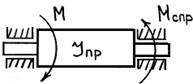
Из приведенного выше соотношения следует, что при приведении инерционных масс и моментов сопротивления к вращающему движению, сложная в кинематическом отношении механическая часть электропривода, заменяется эквивалентным или приведенным механическим звеном. Это звено представляет собой твердое тело, вращающееся вокруг осевой линии со скоростью двигателя, которая обладает моментом инерции равной Jпр и находится под воздействием момента двигателя и приведенного момента сопротивления.
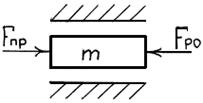
В случае приведения инерционных масс и момента сопротивления к поступательному движению приведенное механическое звено представляет собой поступательно-движущуюся массу, к которой приложены две силы - приведенная и сила рабочего органа.
Таким образом полученная простая модель механической части электропривода в виде одномассовой системы, справедлива для механических звеньев без упругости и зазоров. Такое представление о кинетической системе электропривода (в виде одномассовой системы) может быть сохранено в большинстве случаев для механических звеньев, обладающих небольшими зазорами и незначительной механической упругостью.
Пример: привести статический момент и момент инерции к валу кинематической схемы грузоподъемной лебедки.
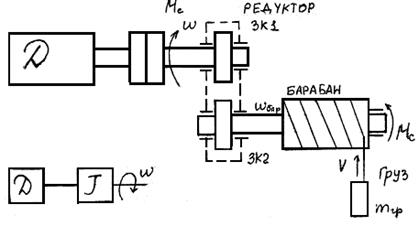
G=mгрg; Mcбар=mгрgRбар;  .
.
Активный статический момент на валу барабана создается силой тяжести груза на крюке лебедки.
Момент, прикладываемый к валу лебедки. Для случая подъема груза, приведенный статический момент на барабане к валу двигателя будет равен
Приведенный момент инерции поступательного движения к вращающему движению барабана определяется:
 ;
;  так как V=wбарRбар.
так как V=wбарRбар.
Тогда суммарный приведенный момент энергии к валу двигателя равен:

Дата добавления: 2016-02-09; просмотров: 1610;