Типы электроприводов.
В зависимости от способа передачи механической энергии от двигателей к рабочим органам производственных машин, электроприводы делятся на 3 основные группы: групповой электропривод, одиночный или индивидуальный и взаимосвязанный электропривод.
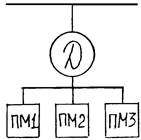 Групповой электропривод – привод, в котором один двигатель приводит в движение с помощью трансмиссии или передач группу рабочих органов одной и нескольких машин. Привод громоздкий, неэкономичный – в настоящее время не применяется.
Групповой электропривод – привод, в котором один двигатель приводит в движение с помощью трансмиссии или передач группу рабочих органов одной и нескольких машин. Привод громоздкий, неэкономичный – в настоящее время не применяется.
Одиночный привод – это привод, в котором приводится в движение только один рабочий орган машины.
В настоящее время это основной вид привода. Такой привод позволяет упростить кинематику рабочей машины. В ряде случаев двигатель встраивается в механизм и образует с РО единое целое. К ним относят электроприводы моторных колес для транспортировки средств, электродрель и т.д.
Новым направлением является создание электромеханических модулей, включающих в себя рабочий орган, двигатель и систему регулирования как правило на программируемых БИС, микроконтроллерах. Такие модульные устройства получили название мехатропных и чаще всего применяются в роботах и станках с программируемым управлением.
Взаимосвязанный электропривод содержит два и более двигательных устройства, связанные между собой электрически или механически. Одной из разновидностей взаимосвязанного электропривода является многодвигательный привод – это привод, в котором рабочий орган одной машины приводится в движение несколькими двигателями.
Многодвигательные приводы могут быть двух типов:
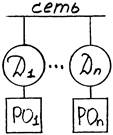
1. Совокупность одиночных приводов одной ПМ объединенных общим техногическим назначением.
Пример: многодвигательного привода – эскалатор (3 одиночных привода: механизм напора, подъема, поворота).
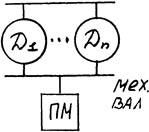
2. Когда несколько двигателей работают на общий механических вал. Применяется когда нет двигателей на большую мощность и когда надо уменьшить инерционность привода. По виду движения - электропривода могут обеспечить вращательное, поступательное, однонаправленное движение и реверсивное движение. Поступательное движение формируется за счет использования преобразовательного механизма.
По степени управляемости электропривод может быть нерегулируемым, регулируемым, программно управляемым, следящим. Следящий электропривод отрабатывает перемещение рабочего органа с определенной точностью в соответствии с произвольно-меняющимся сигналом. Здесь электропривод выбирает структуру или параметры с изменением условий работы рабочей машины с целью выработки оптимального режима – адаптивного электропривода.
В зависимости от диапазона регулирования регулированный электропривод разделяется на:
- привод с ограниченным диапазоном регулирования 2:1;
- привод общего назначения – регулирование 100:1;
- высокоточные электроприводы – регулирование 10000:1.
По роду передаточного устройства электроприводы делятся на редукторный и безредукторный. В редукторном - двигатель передает вращательное движение передаточному устройству содержащему редуктор. Безредукторный электропривод передает движение от двигателя к рабочему механизму без участия каких-либо передаточных механизмов.
По уровню автоматизации электропривод делится на неавтоматизированный с ручным управлением и автоматизированный, в котором управляющее воздействие выработано автоматизированным устройством с участием оператора и автоматизированный электропривод, в котором управляющее воздействие выработано автоматизированным устройством без участия оператора.
По роду тока электропривод делится на приводы переменного и постоянного тока.
Дата добавления: 2016-02-09; просмотров: 11999;