Регулирование скорости электроприводов.
Для обеспечения рационального хода технологических процессов обеспечили наиболее эффективное использование производственных механизмов и оптимизировали режимы их работы, уменьшили потребление электрической энергии, применением регулирования скорости движения механизмов.
Для регулирования скорости движения рабочего органа существуют две возможности:
1. Изменение угловой скорости двигателя.
2. Изменение передаточного числа механических передач, установленных между двигателем и механизмом.
При регулировании скорости механическим способом отсутствует плавность регулирования, да и техническая реализация регулирования относительно сложна и не надежна. В настоящее время в подавляющем большинстве случаев регулирование скорости рабочего органа производится путем изменения скорости электродвигателей, работающих в регулируемом электроприводе.
Под регулированием скорости электродвигателя понимаем – целенаправленное ее изменение независимо от момента на валу двигателя в соответствии с требованиями, которые предъявляются к закону движения рабочего органа механизма. Иными словами это принудительное управление системой скорости, исходя их требований технологического процесса при подаче управляющего сигнала на вход системы.
Под регулируемым электроприводом понимаем – электропривод, обеспечивающий плавное с необходимой точностью регулирование координат скорости и момента в заданном диапазоне.
В естественной схеме включения двигатель не может обеспечить регулирования параметров движения. Поэтому для создания регулируемого электропривода необходим преобразователь электрической энергии. Регулируемые параметры преобразования энергии (напряжение, частота, форма тока, напряжения) удается получить для привода с заданными статическими и динамическими характеристиками. Применение регулируемого электропривода в составе технологических машин и агрегатах связано с одним из следующих обстоятельств:
1. Необходимо оперативное управление ходом технологического процесса (электроприводов кранов, прокатных станов).
2. Необходимо установить и точно выдерживать технологический режим (непрерывные прокатные станы, бумагоделательные машины).
3. Необходимость корректировки технологического процесса (питатели, дозаторы).
4. Автоматическое управление режимом обработки материала (станки с ЧПУ).
5. Необходимо оптимизировать технологический процесс по затратам электрической энергии (электропривода насосов, компрессоров, вентиляторов).
Способы изменения углов скорости двигателя следуют из анализа механических характеристик двигателя:
 - двигатель постоянного тока;
- двигатель постоянного тока;
 - двигатель переменного тока.
- двигатель переменного тока.
 .
.
Анализ этих формул показывает, что угловая скорость двигателя может изменяться, как изменением параметров силовой электрической цепи привода, числом пар полюсов цепи статора и т.д. и изменением магнитного потока, а также изменением параметров источника питания.
Регулирование скорости также возможно изменением момента сопротивления. Этот способ не применим, так как изменение момента вызывает отклонение регулируемой величины от заданного значения. Способы регулирования скорости электропривода связаные с изменением параметров электрических цепей двигателя называют параметрическим. Также различают непрерывный способ регулирования и импульсный способ регулирования. Под непрерывным способом регулирования понимают регулирование, когда регулируемые параметры или значения напряжения и частоты остаются постоянными для данного значения скорости. При импульсном регулировании регулируемые параметры цепи или источника питания периодически изменяются, отклоняясь от заданного значения.
Свойства регулирования электропривода оцениваются следующими показателями:
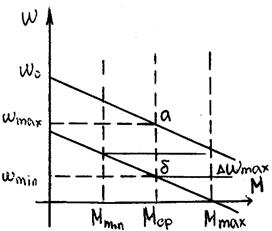
1. Диапазон регулирования скорости, под которым понимают отношение максимальной скорости к минимальной при заданном пределе изменения момента  .
.
Увеличение верхнего предела скорости ограниченно механической прочностью ротора или якоря двигателя, а для двигателя постоянного тока кроме этого верхний предел ограничивает коммутационную способность коллектора.
Нижний предел угловой скорости ограничивается необходимой точностью поддержания заданной скорости при возможности изменения момента статической нагрузки на валу двигателя.
Диапазон регулирования определяется отношением максимальной скорости к минимальной, которая определяется по среднему значению из заданного максимального и минимального его значений, т.е.
 .
.
 ;
;  ;
;  ;
;  ;
;  .
.
2. Вторым важным показателем регулирования скорости является точность регулирования.
Абсолютная статическая ошибка регулирования электропривода будет определятся как падение скорости
 .
.
Абсолютная ошибка одинакова для всех механических характеристик, т.е. постоянна во всем диапазоне регулирования. Относительная величина ошибки переменная, различна для всех механических характеристик. Она находится как отношение абсолютной ошибки к заданной скорости
 .
.
Нижний предел скорости wmin может ограничиваться заданной требуемой точностью и условие выполнения заданной точности:
 ;
;  .
.
3. Плавность регулирования, которая характеризуется разностью двух последовательных значений скорости, которые представляют из себя ступени регулирования и, чем меньше эта разность, тем плавнее осуществляется регулирование скорости. Часто плавность характеризуется коэффициентом плавности регулирования, под которым понимают отношения двух степеней скоростей
 .
.
Наиболее плавное регулирование имеет место при коэффициенте плавности стремящимуся к единице jw®1. Такой результат возможен при регулировании скорости изменением напряжения и изменением частоты асинхронного двигателя.
При параметрическом регулировании плавности изменения скорости зависит от мощности двигателя, так как изменение параметров в силовой цепи связано с коммутационной аппаратурой и, для этих приводов большой и средней мощности, ее число должно быть ограничено.
4. Экономичность регулирования, которая будет тем выше чем меньше, первоначальные затраты необходимые для установки оборудования и эксплуатационные затраты. Эксплуатационные затраты оцениваются косвенным способом по величинам КПД и коэффициенту мощности.
5. Направление, в котором регулируется скорость, т.е. увеличение или уменьшение ее по отношению к номинальной скорости напрямую зависит от способа регулирования. При реостатном регулировании у двигателей постоянного тока или асинхронного двигателя с фазным ротором, регулирование осуществляется вниз от основной.
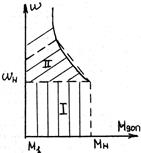
6. Допустимая нагрузка двигателя определяется нагревом обмоток двигателя. Условием полного использования электродвигателя является равенство тока двигателя номинальному. При различных характеристиках зависимости момента сопротивления и мощности механизмов от скорости, необходимо применение таких методов регулирования, при которых эквивалентный момент двигателя по нагреву при изменении скорости будет меняться по такому же закону, как и статический момент. Например, двигатель постоянного тока, если статический момент во всем диапазоне рабочей скорости постоянен, то надо применить метод регулирования вниз от номинальной скорости – это реостатный способ регулирования.
Если регулирование идет при постоянной мощности механизма, то регулирование идет вверх от номинальной скорости – изменением током возбуждения двигателя.
Для определения допустимой мощности следует найти его величину соответствующую номинальному току главной цепи.
I – М=const; II – F-const.
Дата добавления: 2016-02-09; просмотров: 9915;