Реостатное регулирование.
Реостатный способ регулирования осуществляется путем изменения активного сопротивления резистора, включенного в цепь якоря двигателя. Переключение степеней резистора, в зависимости от мощности двигателя, производится или плоским контроллером или силовыми контакторами.
1 способ. Используется для двигателей малой мощности. Число степеней большое, коэффициент плавности больше единицы jw®1.
Для двигателей большой мощности используется 2 способ, он более дорогостоящий, поэтому число степеней небольшое и коэффициент плавности значительно отличается от единицы.
Для всех типов электродвигателей регулирование скорости осуществляется вниз от основной номинальной скорости. При этом жесткость механической характеристики уменьшается. При снижении скорости потери электрической энергии растут, допустимый момент нагрузки остается практически постоянным.
Механические характеристики для двигателя постоянного тока независимого возбуждения при реостатном регулировании производятся при постоянном потоке и линейны. Ф=const. Если принять за допустимый момент по нагреву номинальный ток I=Iн, Ф=Фн, Мдоп=КФнIян=Мн, т.е. момент не изменен от скорости, если принять что двигатель обдуваемый.
Достоинством реостатного регулирования является его простота, все искусственные механические характеристики лежат ниже естественных механических характеристик. Зависимость момента от вводимого в цепи якоря сопротивления линейно.
 .
.
1. weo(M) – скорость двигателя на естественной характеристике при заданном моменте.
2.  - падение скорости двигателя за счет введения дополнительного сопротивления в цепь якоря.
- падение скорости двигателя за счет введения дополнительного сопротивления в цепь якоря.
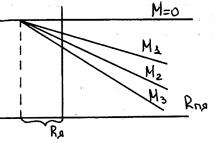
Анализ выражения w от введения сопротивления показывает, что при малых моментах регулирования скорости не эффективно.
Со снижением скорости при реостатном регулировании уменьшает жесткость механических характеристик, при реостатном регулировании также мал диапазон регулирования скорости.
 ;
;  .
.
Диапазон регулирования  .
.
 ;
;
 ;
;  ;
;
 .
.
В практике часто вместо значения минимальной жесткости характеристики задают наибольшее отклонение момента статической нагрузки DМс=(0,5÷1)Мн.
 ;
;  .
.
 ;
;
Rя=0,04÷0,24; Д=2÷2,5; DМс*=0,5÷1.
КПД средний:
 ;
;  .
.
Для двигателей смешанного и последовательного возбуждения зависимость момента от ведения в цепи якоря дополнительного сопротивления, как и для двигателей постоянного тока с независимым возбуждением, имеет линейный характер
 .
.
Дата добавления: 2016-02-09; просмотров: 3029;