Визначення модуля і направлення рівнодіючої двох сил, прикладених в одній точці.
Найпростішою плоскою системою збіжних сил є дві сили  і
і  /рис. 3.3,а/, які прикладені в одній точці О.
/рис. 3.3,а/, які прикладені в одній точці О.
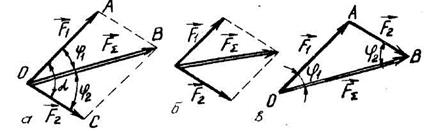
Рис. 3.3
Геометричну суму двох збіжних сил - рівнодіючу  - знаходять згідно з четвертою аксіомою статики за правилом паралелограму /рис. 3.3,а/ чи правилом трикутника /рис. 3.3,в/. Якщо сили і рівні між собою, то паралелограм ОАВС стає ромбом /рис. 3.3,б/.
- знаходять згідно з четвертою аксіомою статики за правилом паралелограму /рис. 3.3,а/ чи правилом трикутника /рис. 3.3,в/. Якщо сили і рівні між собою, то паралелограм ОАВС стає ромбом /рис. 3.3,б/.
При графічному методі визначення рівнодіючої вектори сил і відкладають в одному масштабі, кути a,  і
і  /рис. 3.3,а/ залишаються незмінними, вони не залежать від масштабу побудови сил. Під масштабом сил
/рис. 3.3,а/ залишаються незмінними, вони не залежать від масштабу побудови сил. Під масштабом сил  розуміють відношення модуля сили
розуміють відношення модуля сили  до довжини відрізка
до довжини відрізка  , який зображує цю силу на рисунку, тобто
, який зображує цю силу на рисунку, тобто
 = /l
= /l  ( 3.1 )
( 3.1 )
Масштаб  показує число одиниць сили в ньютонах /Н/ або кілоньютонах /кН/ в одиниці довжини відрізка /мм/, тому його одиниця є ньютон на міліметр /Н/мм/, кілоньютон на міліметр /кН/мм/ і т. ін.
показує число одиниць сили в ньютонах /Н/ або кілоньютонах /кН/ в одиниці довжини відрізка /мм/, тому його одиниця є ньютон на міліметр /Н/мм/, кілоньютон на міліметр /кН/мм/ і т. ін.
Користуючись залежністю /3.1/, можна визначити модуль сили, що зображена на . рисунку (  ),або довжину відрізка
),або довжину відрізка  , що зображує силу
, що зображує силу 
 на рисунку у заданому масштабі
на рисунку у заданому масштабі  )
)
Розкладання сили на дві складові. Правило силового паралелограма можна використати при розкладанні сили на дві складові, рівнодіюча яких повинна дорівнювати заданій силі. Зрозуміло, що коли можна дві збіжні сили  і
і  /рис. 3.3/ замінити однією силою
/рис. 3.3/ замінити однією силою  /рівнодіючою/, то, навпаки, дію однієї сили
/рівнодіючою/, то, навпаки, дію однієї сили  завжди можна замінити дією двох сил
завжди можна замінити дією двох сил  і
і  , які перетинаються на лінії дії заданої сили. При цьому необхідно, щоб сила
, які перетинаються на лінії дії заданої сили. При цьому необхідно, щоб сила  за модулем і напрямом була діагоналлю паралелограма, сторонами якого служать сили і /рис. 3.4/.
за модулем і напрямом була діагоналлю паралелограма, сторонами якого служать сили і /рис. 3.4/.
Враховуючи, що на заданій діагоналі можна побудувати нескінченну кількість паралелограмів, а тому, щоб розв'язок був визначений, необхідно задати додаткові умови:
а/ напрями дії сил і /лінії дії ОМ і ON/; б/ напрям і модуль однієї із складових сил;
в/ модулі обох складових сил; г/ модуль однієї складової сили і напрям другої. 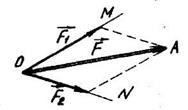 Рис. 3.4
Рис. 3.4
Геометричний метод, визначення рівнодіючої сили /метод силового многокутника/. Розглянемо загальний випадок плоскої системи збіжних сил, приклад якого показано на рис. 3.5,а. Для додавання сил  можна використати метод силового трикутника. Додаючи на підставі цього методу дві сили і /рис. 3.5,б/, одержимо їх рівнодіючу, яку позначимо
можна використати метод силового трикутника. Додаючи на підставі цього методу дві сили і /рис. 3.5,б/, одержимо їх рівнодіючу, яку позначимо  , що відповідає векторному рівнянню /геометричній сумі/
, що відповідає векторному рівнянню /геометричній сумі/
Потім знаходимо геометричну суму  , двох інших векторів
, двох інших векторів
і  :
:
 (3.2 )
(3.2 )
 ( 3.3 )
( 3.3 )
і, зрештою, знаходимо геометричну суму векторів сил  і
і  :
:
 (3.4 )
(3.4 )
Підставляючи у рівняння /3.4/ залежності /3.3/ і /3.2/, маємо:
 ; (3.5 )
; (3.5 )
У загальному вигляді залежність /3.5/ записується:
 ; (3.6 )
; (3.6 )
Таким чином, рівнодіюча плоскої системи збіжних сил дорівнює їх векторній /геометричній/ сумі.
Аналізуючи рис.3.5,б, можна побачити, що для знаходження рівнодіючої  необов'язково визнавати проміжні складові і і т.ін., достатньо від кінця вектора відкласти вектор /рис. 3.5,в/, від кінця_ вектора - вектор
необов'язково визнавати проміжні складові і і т.ін., достатньо від кінця вектора відкласти вектор /рис. 3.5,в/, від кінця_ вектора - вектор  і т.д. Тоді рівнодіюча визначатиметься відрізком, який з’єднує початок першої сили з кінцем останньої сили
і т.д. Тоді рівнодіюча визначатиметься відрізком, який з’єднує початок першої сили з кінцем останньої сили  , і матиме напрям від початку першої сили до кінця останньої. Фігуру, яку ми одержали /рис. 3.5,в/, називають силовим многокутником, або планом сил. Силовий многокутник будується у масштабі .
, і матиме напрям від початку першої сили до кінця останньої. Фігуру, яку ми одержали /рис. 3.5,в/, називають силовим многокутником, або планом сил. Силовий многокутник будується у масштабі .
Необхідно звернути увагу на те, що складові силового многокутника напрямлені в один бік обходу контура ABCDE, а рівнодіюча - у протилежний. Крім цього, неважко показати, що послідовність побудови сторін силового многокутника не впливає на
|
|
|
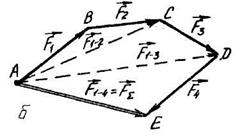
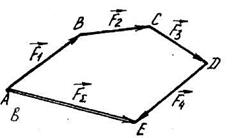
Рис. 3.5
остаточний результат тобто, якщо поміняти місцями сили то величина і напрям рівнодіючої не зміниться /від перестановки доданків сума не змінюється/.
Умови рівноваги системи збіжних сил. Як ми вже побачили, рівнодіюча замінює систему збіжних сил. Тому, визначивши рівнодіючу збіжних сил, легко розв’язати задачу про зрівноваження цієї системи сил. Для цього необхідно додати до заданої системи сил ще одну силу, яка чисельно дорівнює рівнодіючій , але напрямлена у протилежний бік /рис. 3.5,а/, тобто зрівноважуючу силу  . Силовий многокутник, який побудовано для системи сил, що знаходяться в рівновазі, буде замкнутим /рис. 3.6/. Векторна сума таких сил дорівнює нулю тобто
. Силовий многокутник, який побудовано для системи сил, що знаходяться в рівновазі, буде замкнутим /рис. 3.6/. Векторна сума таких сил дорівнює нулю тобто

(3.7)
Інакше, для рівноваги плоскої системи збіжних сил необхідно і достатньо, щоб геометрична сума заданих сил /рівнодіюча/ дорівнювала нулю.
Геометрична умова рівноваги використовується при розв'язанні задач графічним
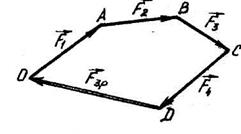
Рис. 3.6
методом. Якщо система збіжних сил знаходиться в рівновазі, то силовий многокутник є замкнений.
Інакше, для рівноваги плоскої системи збіжних сил необхідно і достатньо, щоб геометрична сума заданих сил /рівнодіюча/ дорівнювала нулю.
Питання для самоконтролю
1. Яка система сил називається збіжною?
2. Які є системи збіжних сил? Наведіть приклади найпростіших систем збіжних сил /плоскої і просторової/.
3. Сформулюйте правила побудови силового трикутника, паралелограма, паралелепіпеда і многокутника.
4. Графічна умова рівноваги плоскої та просторової систем збіжних сил.
5. Чи може вільне тверде тіло знаходитися в рівновазі під дією а/ однієї сили; б/ двох сил; в/ трьох сил?
6. Яку фігуру утворює силовий многокутник, побудований для плоскої зрівноваженої системи збіжних сил, що однакові за модулем, і складаються а/ з трьох сил, б/ чотирьох сил, в/ п’яти сил тощо?
7. Яку фігуру утворює паралелепіпед сил, побудований для трьох збіжних, взаємно перпендикулярних і рівних за модулем сил?
Заняття № 4
Дата добавления: 2016-01-26; просмотров: 2610;