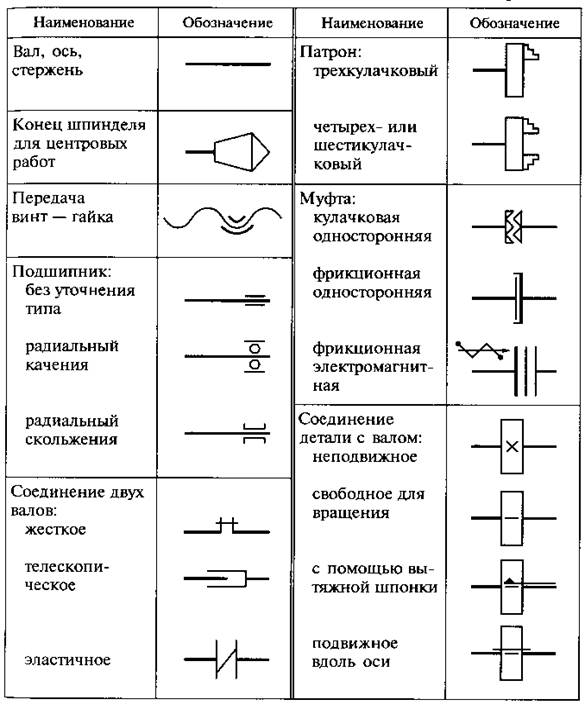
Элементов механического привода
По назначению механизмы привода делятся на двигатели, механизмы для передачи преобразования, реверсирования и регулирования скорости движений.
Передающие механизмы передают движение от одного элемента к другому. Различают ременные, цепные, зубчатые и червячные передачи.
Ременная передача (рисунок 2.4, а) состоит из ведущего вала 1 (со шкивом диаметром d1 ), ведомого вала 2(со шкивом диаметром d2) и ремня 3 (плоского или клинового). Её передаточное отношение i= (n2/n1)ηр = (d1/ d2) ηр, где п1 , п2 — частота вращения ведущего и ведомого шкивов; ηр — коэффициент проскальзывания ремня относительно поверхности шкивов, ηр= 0,9...0,96.
Цепная передача (рисунок 2.4, б) состоит из ведущего вала 1 со звездочкой z1 ведомого вала 2 со звездочкой z2 и цепи 3. Ее передаточное отношение i = п2/п1 = z2/ z1·.
Зубчатая передача цилиндрическая (рисунок 2.4, в) и коническая (рисунок 2.4, г) состоят из ведущего вала 1 с шестерней z1 и ведомого вала 2с шестерней z2. Ее передаточное отношение i = п2/п1 = z2/ z1.
Червячная передача (рисунок 2.4, д) состоит из ведущего вала 1с червяком, имеющим k заходов, и ведомого вала 2 с червячным колесом, имеющим zзубьев. Ее передаточное отношение i = п2/п1 = k / z .
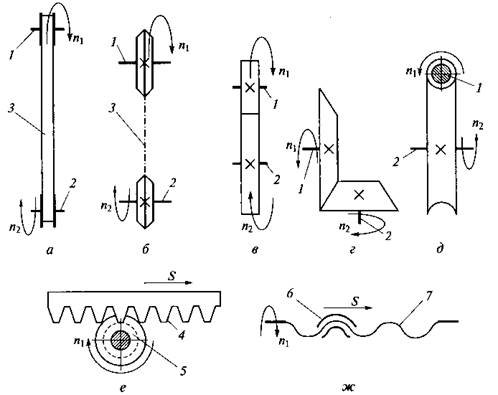
а – ременная; б – цепная; в – зубчатая цилиндрическая; г – зубчатая коническая;
д – червячная; е – реечная; ж – винтовая; 1 – ведущий вал; 2 — ведомый вал;
3 – промежуточный элемент (ремень или цепь); 4 – рейка; 5 – зубчатое колесо;
6 – ходовая гайка; 7 – ходовой винт; п1, п2 – частота вращения ведущего и ведомого валов соответственно; S – линейное перемещение
Рисунок 2.4 Основные виды передач
Механизмы для преобразования движения.Для преобразования вращательного движения в поступательное в основном применяют реечную (рисунок 2.4, е) и винтовую (рисунок 2.4, ж) передачи.
Реечная передача состоит из зубчатого колеса 5, имеющего zзубьев, и зубчатой рейки 4. Если модуль реечного зацепления т, то за один оборот колеса рейка переместится на величину S = πпmz .
Винтовая передача состоит из вращающегося ходового винта 7, имеющего шаг t, и ходовой гайки 6. За один оборот ходового винта, имеющего k заходов, гайка переместится в осевом направлении на величину S = t k.
Механизмы для регулирования скорости движения. Ступенчатое изменение скорости обеспечивается двух-, трех- и четырехскоростными асинхронными электродвигателями или за счет применения набора зубчатых колес (так называемых редукторов).
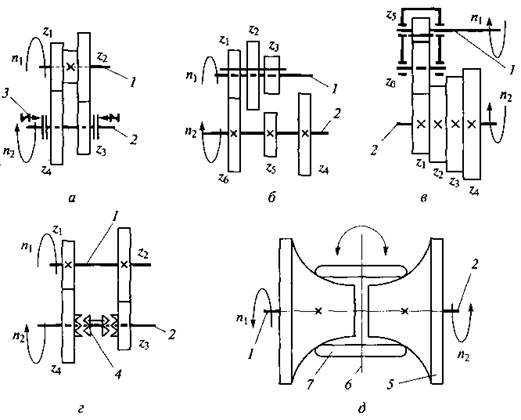
а – редуктор с дистанционным переключением передач; б – редуктор с механическим переключением передач; в – редуктор с использованием конуса Нортона; г – редуктор с механической двусторонней муфтой; д – вариатор; 1 – ведущий вал; 2 – ведомый вал; 3 – фрикционная электромагнитная муфта; 4 – кулачковая двусторонняя муфта; 5 – шкив; 6 – ось; 7 – ролик; п1, п2 – частота вращения ведущего и ведомого валов соответственно; S – линейное перемещение
Рисунок 2.5 Механизмы для регулирования скорости движения
Редуктор с дистанционным переключением передач (рисунок 2.5, а). Движение ведущего вала 1, вращающегося с постоянной частотой п1, передается на ведомый вал 2 через две пары зубчатых колёс (z1 , z2.) и (z3 , z4). Дистанционное включение нужной пары производится фрикционными электромагнитными муфтами 3. Следовательно: п2 = п1 z4/ z1илип3 =п1 z3/ z2.
Редукторы с механическим переключением передач. На рисунке 2.5, бпоказан редуктор с использованием блока. Блок прямозубых зубчатых колес (z1, z2, z3)перемещается по шпонке или шлицам ведущего вала 1. На ведомом валу 2закреплены колеса (z4, z5, z6). В зависимости от положения блока прямозубых зубчатых колес частота вращения ведомого вала будет равна п2 = п1 z6/ z1, или
п2 = п1 z5/ z2 ,или п2 = п1 z4/ z3.
На рисунке 2.5, в показан редуктор с использованием конуса Нортона. На ведущем валу 1 закреплен набор – так называемый конус – прямозубых зубчатых колес (z1, z2, z3, z4 ). Прямозубое колесо z5 перемещается по шпонке или шлицам ведомого вала 2. Движение с вала 1на вал 2 передается через промежуточное колесо z0. В зависимости от положения колеса z5 частота вращения ведомого вала будет равна п2 = п1 z5/ z1 , или п2 = п1 z5/ z2 , илип2 = п1 z5/ z3, или п2 = п1 z5/ z4.
На рисунке 2.5, г показан редуктор с механической двусторонней кулачковой муфтой-синхронизатором. Достоинством такого решения будет возможность применения косозубых или шевронных зубчатых колес, что существенно снизит габариты и массу редуктора. Работа редуктора аналогична работе редуктора, показанного на рисунке 2.5, а, только переключение передач осуществляется за счет перемещения кулачковой муфты 4по шлицам ведомого вала 2.
Бесступенчатое изменение скорости возможно за счет применения вариаторов (рисунок 2.5, д). В вариаторе шкивы 5 закреплены соответственно на ведущем 1 и ведомом 2 валах. Ролики 7 закреплены на оси 6. При повороте оси роликов на угол ±φ обеспечивается плавное изменение частоты вращения ведомого вала.
Реверсивные механизмы. Изменение направления вращения всего привода возможно за счет переключения фаз асинхронного электродвигателя, изменением полярности подключения электродвигателя постоянного тока или применением зубчатых механизмов. В механизмах с цилиндрическими зубчатыми колесами (рисунок 2.6, а) реверсирование движения осуществляется за счет перемещения по шлицам ведомого вала 2 кулачковой муфты 3. Для передачи движения с ведущего вала 1 (частота вращения п1) на вал 2 применяется паразитное зубчатое колесо z3. Частота прямого вращения ведомого вала равна п2 = п1 z5/z1 . Частота обратного вращения ведомого вала равна п2*=п1 z4/z2 В механизмах с коническими зубчатыми колесами (рисунок 2.6, б) используется аналогичный принцип реверсирования, но паразитное зубчатое колесо не требуется.
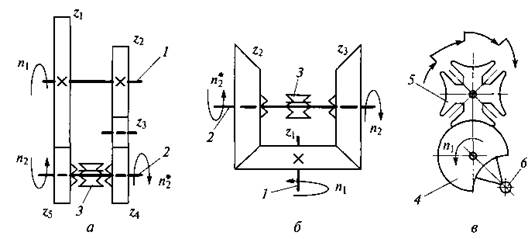
а – с цилиндрическими зубчатыми колесами; б – с коническими зубчатыми колесами; в – мальтийский крест; 1 – ведущий вал; 2 – ведомый вал; 3 – кулачковая муфта; 4 – водило; 5 – мальтийский крест; 6 – палец; z1, z2 – зубчатые колеса; п1, п2 – частота вращения ведущего и ведомого валов соответственно;
п2* – частота вращения реверса
Рисунок 2.6 Реверсивные и делительные механизмы
Делительные механизмы. Поворот на заданный угол заготовки или элемента станка (деление) осуществляют с помощью шаговых электродвигателей, оптических или механических делительных головок. Достаточно часто используется мальтийский крест (рисунок 2.6, в). В нем непрерывное вращательное движение водила 4, закрепленного на ведущем валу, преобразуется (через палец 6) в прерывистое вращательное движение мальтийского креста 5. У равномерного мальтийского креста угол поворота за один оборот водила равен 360°/z, где z — число пазов на мальтийском кресте.
33 Лекция 10
Точение
2.3.1 Общие сведения. Точение – процесс лезвийной обработки резанием поверхностей вращения и торцевых поверхностей. Главное вращение – вращательное, придается заготовке; движение подачи – поступательное, придается режущему инструменту в направлении вдоль, перпендикулярно или под углом к оси вращения заготовки. Обработку наружных поверхностей называют точением, или обтачиванием, обработку внутренних поверхностей – растачиванием.
Дата добавления: 2015-11-26; просмотров: 2290;