Формулы связи координат соответственных точек снимка и местности.
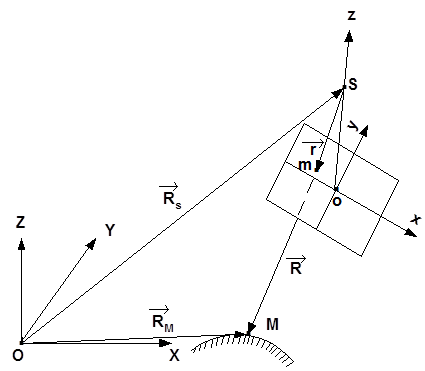 |
Рис.1.3.1
Пусть из точки S получен снимок Р, на котором точка М местности изобразилась в точке m. Найдем зависимости между координатами этих точек. Положение точки М местности в системе координат объекта OXYZ определяет вектор  . Вектор
. Вектор  определяет положение центра проекции S в системе координат объекта OXYZ.
определяет положение центра проекции S в системе координат объекта OXYZ.
Векторы  и
и  определяют собственно положение точек m и М относительно центра проекции S.
определяют собственно положение точек m и М относительно центра проекции S.
Из рис.1.3.1 следует, что
 (1.3.1)
(1.3.1)
Векторы  коллинеарные, поэтому можно записать, что
коллинеарные, поэтому можно записать, что
 , (1.3.2)
, (1.3.2)
где N-скалярная величина.
С учетом (1.3.2) выражение (1.3.1) имеет вид
 ; (1.3.3)
; (1.3.3)
В координатной форме выражение (1.3.3) имеет вид
 ;
;
или
 . (1.3.4)
. (1.3.4)
В выражении (1.3.4):
X,Y,Z-координаты точки М в системе координат объекта,
 координаты центра проекции S в системе координат объекта;
координаты центра проекции S в системе координат объекта;  координаты вектора
координаты вектора  в системе координат объекта.
в системе координат объекта.
 ; (1.3.5)
; (1.3.5)
где А-матрица преобразования координат, элементы aij которой определяются по значениям угловых элементов внешнего ориентирования снимка w,a,À.
Из третьей формулы выражения (1.3.4) следует, что
 .
.
Подставив значение N в первые две формулы выражения (1.3.4) получим формулы связи координат соответственных точек местности и снимка:

 ; ( 1.3.6)
; ( 1.3.6)
которые с учетом (1.3.5) имеют вид
 ; (1.3.7)
; (1.3.7)
Из формул (1.3.6) следует, что координаты точки местности по снимку можно получить координатам ее изображения на снимке, если известны элементы внутреннего и внешнего ориентирования снимков и известна высота Z этой точки.
Найдем теперь формулы связи координат соответственных точек снимка и местности, которые позволят вычислить координаты изображения точки на снимке в системе координат снимка по координатам соответственной точки местности, определенным в системе координат объекта OXYZ.
Из выражения (1.3.3) следует, что
 . (1.3.8)
. (1.3.8)
В координатной форме выражение (1.3.8) имеет вид
 ;
;
или
 ; (1.3.9)
; (1.3.9)
В выражении (1.3.9) x,y –координаты изображения точки местности m в системе координат снимка Sxyz.
 ; (1.3.10)
; (1.3.10)
Из третьего выражения (1.3.9) следует, что
 .
.
Подставив значение  в первые два уравнения выражения (1.3.9), получим формулы связи координат соответственных точек снимка и местности.
в первые два уравнения выражения (1.3.9), получим формулы связи координат соответственных точек снимка и местности.
 , (1.3.11)
, (1.3.11)
которые с учетом (1.3.10) имеют вид
 . (1.3.12)
. (1.3.12)
Формулы (1.3.12) в фотограмметрии часто называют уравнениями коллинеарности.
Дата добавления: 2015-09-07; просмотров: 955;