Построение и уравнивание маршрутной и блочной фототриангуляции по методу связок
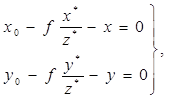
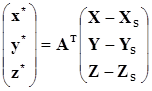
При построении сети фототриангуляции методом связок для каждого изображения точки (определяемой и опорной), измеренного на снимке составляются уравнения коллинеарности:
 (1.6.1)
(1.6.1)
в которых:
 ;
;
x,y – координаты изображения точки местности, измеренной на снимке;
X,Y,Z – координаты точки местности в системе координат объекта OXYZ;
XS,YS, ZS – координаты центров проекции снимка в системе координат объекта;
А – матрица преобразования координат, элементы a ij которой являются функциями угловых элементов внешнего ориентирования снимка.
 |
Уравнения поправок, соответствующие условным уравнениям (1.5.1) имеют вид: (1.6.4)
Для каждой планово-высотной опорной точки составляются уравнения поправок:
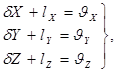 (1.6.5)
(1.6.5)
в которых:

X,Y,Z – измеренные координаты опорной точки,
Xo,Yo,Zo – приближенные значения координат опорной точки.
Для плановой опорной точки составляются два первых уравнения из системы уравнений (1.6.5), а для высотной опорной точки третье уравнение.
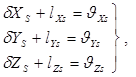
Если с помощью системы GPS были определены координаты центров проекций снимков S, то для каждого центра проекции составляются уравнения поправок:
 (1.6.6)
(1.6.6)
в которых:
Xs,Ys,Zs – измеренные координаты центров проекции снимков,
XoS, YoS, ZoS – их приближенные значения.
В случае, если при съемке с помощью навигационного комплекса, включающего инерциальную и GPS системы, были определены угловые элементы внешнего ориентирования снимков  для каждого снимка составляются уравнения поправок:
для каждого снимка составляются уравнения поправок:
 (1.5.7)
(1.5.7)
в которых:
 - измеренные значения угловых ЭВО,
- измеренные значения угловых ЭВО,
 - их приближенные значения.
- их приближенные значения.
Полученную таким образом систему уравнений поправок решают методом приближений по методу наименьших квадратов под условием VTV=min.
В результате решения находят значения элементов ориентирования всех снимков сети и координаты точек сети в системе координат объекта.
В первом приближении в уравнениях поправок (1.5.5), (1.5.6) и (1.5.7) приближенные значения неизвестных принимаются равными их измеренным значениям.
С геометрической точки зрения сеть фототриангуляции по методу связок строится под условием пересечения соответственных проектирующих лучей связок в точках объекта (рис. 1.6.1):
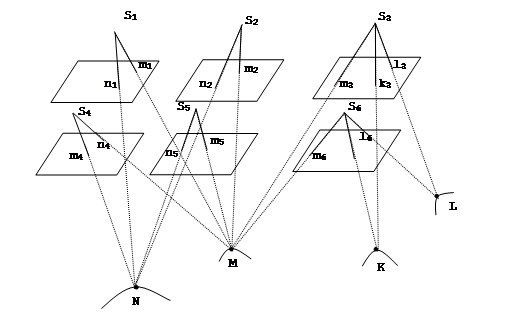
Рис. 1.6.1
Общее количество неизвестных, определяемых при построении и уравнивании блочной сети, можно определить по формуле:
 (1.6.8)
(1.6.8)
где n – количество снимков в сети;
k – количество определяемых точек (включая опорные геодезические точки).
Общее количество уравнений поправок можно определить по формуле:
 , (1.6.9)
, (1.6.9)
в которой:
m – общее количество измеренных на снимках точек;
c - количество планово-высотных опорных точек;
i - количество плановых опорных точек;
l – количество высотных опорных точек;
j – количество центров проекций снимков, измеренных с помощью системы GPS.
Рассчитаем величины M и N для блочной сети изображенной на рис. 1.6.2, состоящей из двух маршрутов, в каждом из которых 4 снимка.

 |

 |  | | |
 |  | | |










 |
| |  |



| | |

| |  | ||


| |  |










 |  | ||||||
 | |||||||
| | |||||||





Рис. 1.6.2
- 
 - главная точка снимка;
- главная точка снимка;
 - точка сети;
- точка сети;

| |
 - планово-высотная точка;
- планово-высотная точка;
- количество точек, измеренных на снимках (в числителе – количество точек, измеренных на стереокомпараторе или аналитической стереофотограмметрической системе, а в знаменателе – количество точек, измеренных на цифровой фотограмметрической системе).
Для блочной сети, изображенной на рис. 1.6.1, n=8, а k=20, поэтому  .
.
Из рис. 1.6.2 следует, что m=72, если снимки измерялись на стереокомпараторе или аналитическом стереофотограмметрическом приборе, или m=60 в случае, если снимки измерялись на цифровой фотограмметрической системе
 , а
, а 
следовательно,
 , если снимки измерялись на стереокомпараторе или аналитической стереофотограмметрической системе, и
, если снимки измерялись на стереокомпараторе или аналитической стереофотограмметрической системе, и
 , если снимки измерялись на цифровой фотограмметрической системе.
, если снимки измерялись на цифровой фотограмметрической системе.
Дата добавления: 2015-09-07; просмотров: 1822;